Sistema de metrología óptica proyectiva para determinar actitud y posición.
Un sistema de metrología óptica proyectiva (1) que comprende:
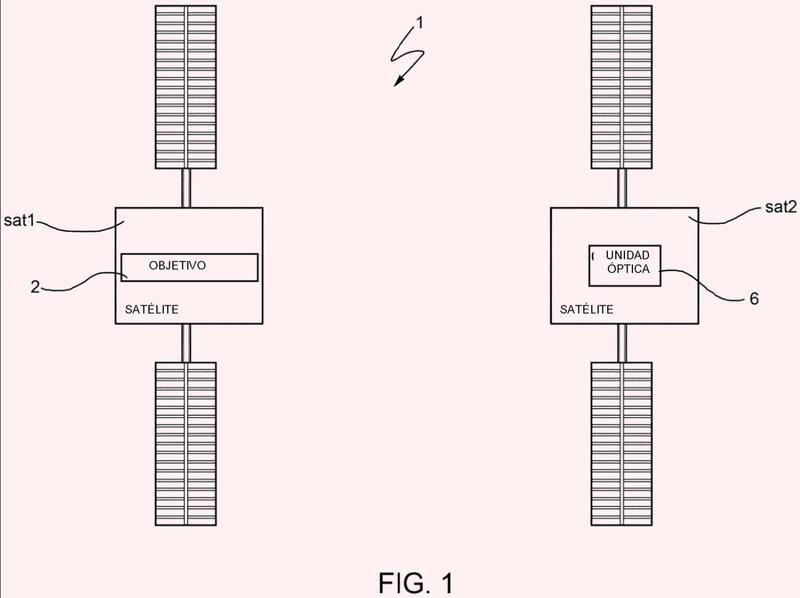
- un objetivo luminoso (2) que comprende una pluralidad de fuentes de luz (4a a 4c) con una disposición espacial prefijada;
- un sensor de imágenes opto-electrónico (10);
- una unidad óptica (6) configurada para recibir una señal lumínica (R1, R2) procedente del objetivo luminoso y para definir dos trayectos ópticos distintos para la señal lumínica hacia el sensor de imágenes opto-electrónico, siendo los dos trayectos ópticos tales como para provocar la formación simultánea en el sensor de imágenes opto-electrónico de al menos dos imágenes (I1, I2) del objetivo luminoso;
en el que la unidad óptica (6) comprende además un elemento óptico receptor (12) configurado para recibir la señal lumínica (R1, R2) procedente del objetivo luminoso (2); y en el que ambos trayectos ópticos se extienden hacia el sensor de imágenes opto-electrónico (10) a partir del elemento óptico receptor;
comprendiendo además la unidad óptica:
- un primer circuito óptico (OT1) que tiene un primer plano principal frontal (P1; P42a), un primer plano principal trasero (P1; P42b) y una primera longitud focal efectiva trasera (f1; fe1) y que define un primer trayecto óptico de dichos dos trayectos ópticos;
- un segundo circuito óptico (OT2) que tiene un segundo plano principal frontal (P2; P44a), un segundo plano principal trasero (P2; P44b) y una segunda longitud focal efectiva trasera (f2; fe2) y que define un segundo trayecto óptico de dichos dos trayectos ópticos;
y en el que los planos principales frontales primero y segundo están separados del elemento óptico receptor (12), respectivamente, por una primera distancia (dc + d1) y una segunda distancia (dc + d2), distintas entre sí y medidas, respectivamente, a lo largo de los trayectos ópticos primero y segundo; y en el que los planos principales traseros primero y segundo están separados del sensor de imágenes opto-electrónico (10), respectivamente, por una tercera distancia (d3) y una cuarta distancia (d4), siendo medidas dichas distancias tercera y cuarta, respectivamente, a lo largo de los trayectos ópticos primero y segundo y siendo, respectivamente, una función de las longitudes focales efectivas traseras primera y segunda (f1, f2; fe1, fe2); y en el que el sensor opto-electrónico (10) comprende una superficie de detección (A) y en el que el objetivo luminoso (2), la superficie de detección y las longitudes focales efectivas traseras primera y segunda (f1, f2; fe1, fe2) son tales que, cuando el objetivo luminoso se establece a una primera distancia (Dprog) de la unidad óptica (6), ambas imágenes (I1, I2) están contenidas dentro de la superficie de detección;
- comprendiendo además el sistema de metrología óptica proyectiva una unidad de procesamiento electrónico (3) acoplada con el sensor de imágenes opto-electrónico y configurada para determinar, para cada una de dichas dos imágenes, un número de máximos de intensidad lumínica, igual al número de fuentes de luz del objetivo luminoso y para determinar, sobre la base de la posición de dichos números de máximos para dichas dos imágenes, una pluralidad de distintas cantidades, que indican la posición y la actitud del objetivo luminoso con respecto a la unidad óptica.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12163536.
Solicitante: Thales Alenia Space Italia S.p.A. Con Unico Socio.
Nacionalidad solicitante: Italia.
Dirección: Via Saccomuro, 24 Roma ITALIA.
Inventor/es: BRESCIANI,FULVIO, MUSSO,FABIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64G1/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64G ASTRONAUTICA; VEHICULOS O EQUIPOS A ESTE EFECTO (aparatos o métodos para obtener materiales de fuentes extraterrestres E21C 51/00). › B64G 1/00 Vehículos espaciales. › Satélites artificiales; Sus sistemas; Vehículos interplanetarios (transbordadores espaciales B64G 1/14; sistemas de radiotransmisión que utilizan satélites H04B 7/185).
- G01C15/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos o accesorios topográficos no previstos en los grupos G01C 1/00 - G01C 13/00.
- G01S17/06 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas que determinan los datos de posición de un blanco.
- G01S5/16 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas electromagnéticas que no sean ondas de radio.
PDF original: ES-2555270_T3.pdf
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Sistema de detección de localización de fuente de luz, del 6 de Mayo de 2020, de Thales Defense & Security, Inc: Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema: un dispositivo de emisión de luz situado con respecto […]
Procedimiento y dispositivo para determinar la distancia entre un receptor aéreo y un emisor terrestre fijo, del 19 de Junio de 2019, de MBDA FRANCE: Procedimiento para la determinación continua de la distancia entre un receptor aéreo (R) móvil de manera conocida en una trayectoria conocida (T) y un […]
SISTEMA INFO-OPTICO PARA LA MONITORIZACIÓN DEL MOVIMIENTO DE ROEDORES DE LABORATORIO, del 10 de Enero de 2019, de UNIVERSIDAD DE MURCIA: Sistema info-óptico para la monitorización del movimiento de roedores de laboratorio. La presente invención consiste en un sistema info-óptico diseñado […]
SISTEMA DE POSICIONAMIENTO, del 10 de Enero de 2019, de IBAÑEZ CRUZ, Javier: Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente […]
 Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
 Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]