Posicionamiento de cabina de ascensor usando un amortiguador de vibraciones.
Un procedimiento para controlar la posición de la cabina de un ascensor,
que comprende:
determinar que una cabina (22) de ascensor requiere una re-nivelación;
determinar si un amortiguador (40) de vibraciones está activado o no; y
ajustar una ganancia para controlar la operación de un motor (26) responsable de mover la cabina (22) del ascensor para la re-nivelación si el amortiguador (40) de vibraciones está activado.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2008/085647.
Solicitante: OTIS ELEVATOR COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 10 FARM SPRINGS FARMINGTON, CT 06032-2568 ESTADOS UNIDOS DE AMERICA.
Inventor/es: ADIFON, LEANDRE, ROBERTS,RANDALL KEITH.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66B17/34 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › B66B 17/00 Aparellaje de los pozos de minas. › Collares de seguridad; Cuñas de jaulas.
PDF original: ES-2545106_T3.pdf
Fragmento de la descripción:
Posicionamiento de cabina de ascensor usando un amortiguador de vibraciones Antecedentes Los sistemas de ascensor incluyen una cabina de ascensor que se mueve entre varios rellanos para proporcionar servicio de ascensor a diferentes niveles dentro de un edificio, por ejemplo. Una máquina incluye un motor y un freno para mover selectivamente la cabina de ascensor a una posición deseada y, a continuación, mantener la cabina en esa posición. Un controlador de la máquina controla la operación de la máquina para responder a las solicitudes de servicio de ascensor por parte de los pasajeros y para mantener la cabina del ascensor en un rellano seleccionado de una manera conocida.
Un reto asociado con los sistemas de ascensor es el de mantener la cabina a una altura apropiada con relación a un rellano para facilitar un paso fácil entre la cabina del ascensor y un vestíbulo en el que está estacionada la cabina del ascensor. Idealmente, el suelo de la cabina se mantiene nivelado con el suelo del rellano para facilitar el movimiento de los pasajeros entre el vestíbulo y la cabina del ascensor mientras se minimiza la posibilidad de que alguien se tropiece. Las normas de elevación actuales definen un umbral de desplazamiento que establece una diferencia máxima permisible entre el suelo del rellano y el suelo de la cabina del ascensor. Cuando esa distancia es mayor que el umbral de la norma, el sistema de ascensor debe re-nivelar o corregir la posición de la cabina del ascensor.
El enfoque convencional de re-nivelación de ascensor incluye la detección de la cantidad de desplazamiento entre la cabina y el piso. Típicamente, esto se consigue usando un codificador en el transductor de posición primario o en otras partes giratorias asociadas con la cabina del ascensor. Cuando el desplazamiento es mayor que un umbral establecido, se inicia un procedimiento de re-nivelación. El controlador de la máquina lleva a cabo una determinación acerca del peso de la cabina y aplica un par preliminar al motor para levantar la cabina antes de liberar el freno de la máquina. A continuación, la corriente del motor es controlada usando un compensador con retroalimentación de ganancia fija sobre el error de posición. El documento EP0641735A1 describe otro enfoque de re-nivelación de ascensor, en el que un sistema de suspensión activa actúa independientemente del motor para mover la cabina de ascensor.
El enfoque convencional para re-nivelar una cabina de ascensor funciona bien en la mayoría de las situaciones. En algunos edificios de gran altura de más de 120 m, por ejemplo, el enfoque convencional puede no proporcionar resultados satisfactorios. Esto ocurre, en parte, debido a que la rigidez efectiva de los miembros de cableado del ascensor disminuye proporcionalmente con su longitud. Por consiguiente, una disposición de cableado de ascensor más larga permite una mayor cantidad de deflexión estática en respuesta a cambios de carga en la cabina del ascensor, que son resultado de la entrada a, o la salida de pasajeros desde, la cabina, por ejemplo. Además, hay un tiempo de retardo entre la acción del motor, la reacción de la cabina y la respuesta del transductor de posición. Dicho retardo introduce posibles problemas de estabilidad en la lógica de realimentación de posición asociada con el enfoque convencional. Otro problema es que la menor rigidez de la disposición de cableado reduce la frecuencia de resonancia asociada con los rebotes de la cabina de ascensor resultantes de los cambios en la carga en la cabina. La resonancia de frecuencia más baja crea una limitación en las ganancias tradicionales de la lógica de control, lo que limita el ancho de banda y, por lo tanto, el rendimiento.
Sumario Un procedimiento ejemplar de control de la posición de una cabina de ascensor incluye la determinación de que una cabina de ascensor requiere una re-nivelación y la determinación de si un amortiguador de vibraciones está activo o no. Una ganancia para controlar el funcionamiento de un motor responsable de mover la cabina del ascensor para la re-nivelación es ajustada si el amortiguador de vibraciones está activado.
Un sistema de ascensor ejemplar comprende un amortiguador de vibraciones que está configurado para resistir el movimiento vertical de una cabina de ascensor asociada. Un dispositivo controlador controla un motor configurado para mover la cabina de ascensor asociada. El dispositivo controlador incluye un servo de velocidad que tiene una ganancia con un valor de referencia establecido. El dispositivo controlador está configurado para ajustar selectivamente la ganancia del servo de velocidad desde el valor de referencia establecido durante una re-nivelación de la cabina de ascensor asociada si el amortiguador de vibraciones está activado.
Las diversas características y ventajas de la presente invención serán evidentes para las personas con conocimientos en la materia a partir de la descripción detallada siguiente. Los dibujos que acompañan a la descripción detallada pueden describirse brevemente como sigue.
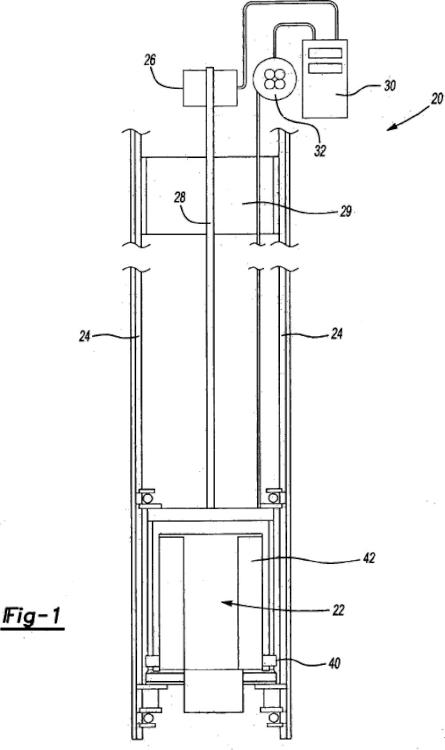
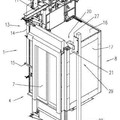
Breve descripción de los dibujos La Figura 1 muestra esquemáticamente partes seleccionadas de un sistema de ascensor ejemplar.
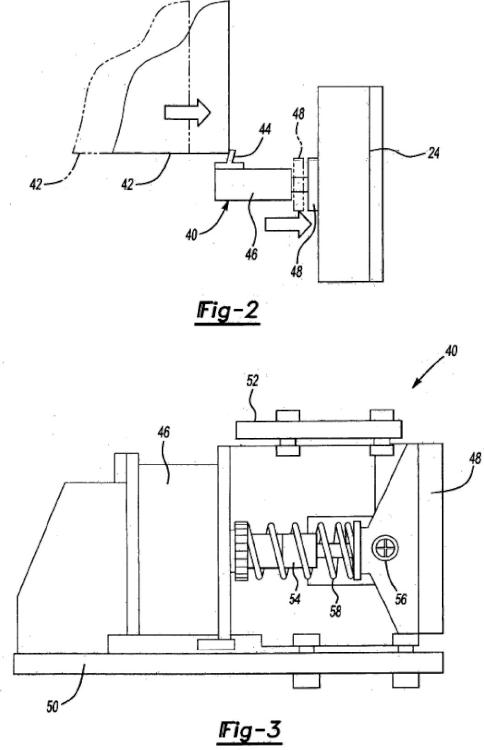
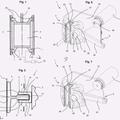
La Figura 2 muestra esquemáticamente una disposición de amortiguador de vibraciones ejemplar.
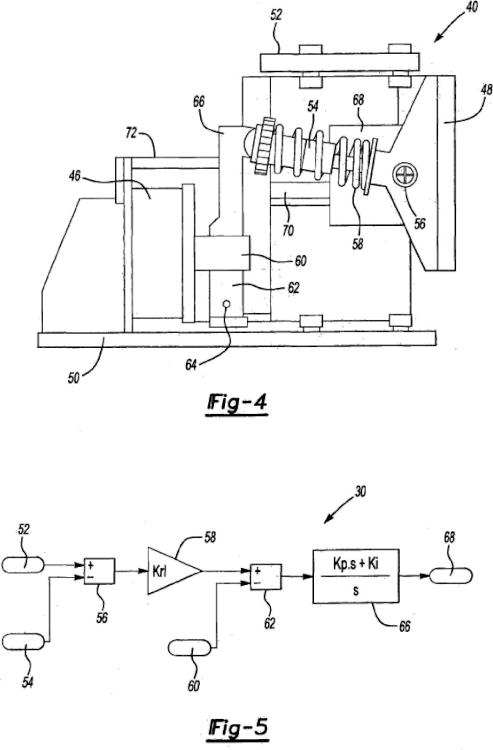
La Figura 3 ilustra esquemáticamente otro amortiguador de vibraciones ejemplar.
La Figura 4 ilustra esquemáticamente otro amortiguador de vibraciones ejemplar.
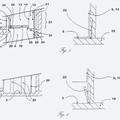
La Figura 5 ilustra esquemáticamente una disposición de control de ascensor ejemplar.
Descripción detallada La Figura 1 ilustra esquemáticamente partes seleccionadas de un sistema 20 de ascensor ejemplar. Una cabina 22 de ascensor está soportada para su movimiento a lo largo de carriles 24 guía en respuesta a la operación de una máquina 26 de ascensor. En este ejemplo, la máquina 26 de ascensor es responsable de controlar el movimiento de una disposición 28 de cableado que soporta el peso de la cabina 22 de ascensor y un contrapeso 29. La configuración de cableado puede incluir cualquier relación de cableado conocida, tal como los sistemas de cableado 1:1 o 2:1 tradicionales, por ejemplo. Un motor y un freno de la máquina 26 operan en respuesta a un controlador 30 de la máquina de ascensor para conseguir el movimiento y el posicionamiento deseados de la cabina 22 de ascensor.
El controlador 30 utiliza información relacionada con la operación de la máquina 26 e información relacionada con una posición de la cabina 22 de ascensor para determinar cómo controlar la máquina 26 para conseguir la operación deseada del sistema de ascensor. El ejemplo de la Figura 1 incluye un transductor 32 de posición primario que proporciona información al controlador 30 con relación a la posición de la cabina 22 de ascensor. Por ejemplo, el transductor 32 de posición primario comprende una rueda codificadora y un cable o cinta que se mueve con la cabina 22 de ascensor de manera que la rueda codificadora proporciona información al controlador 30 que indica una posición actual de la cabina de ascensor. La información relacionada con la posición de la cabina 22 de ascensor puede ser determinada de cualquier manera conocida.
El controlador 30 incluye un servo de velocidad que se usa para controlar la operación del motor de la máquina 26. El servo de velocidad tiene una ganancia de re-nivelación (Krl) y ganancias proporcional (Kp) e integral (Ki) que controlan las señales de par motor proporcionadas al motor de la máquina 26. Las ganancias del servo de velocidad se establecen de una manera conocida bajo la mayoría de las circunstancias para proporcionar un rendimiento deseado del sistema de ascensor.
Bajo algunas circunstancias, será necesario re-nivelar la cabina 22 de ascensor cuando está parada en un rellano. En el caso de un edificio de gran altura, cuando la cabina 22 de ascensor está en un rellano relativamente bajo, la longitud extendida de la disposición 28 de cableado introduce retos de control adicionales, tal como se ha descrito anteriormente. El controlador 30 ejemplar utiliza una ganancia de servo de velocidad ajustada para conseguir un rendimiento de re-nivelación deseado cuando la cabina 22 de ascensor está en un rellano donde las técnicas de re-nivelación convencionales por sí solas es posible que no proporcionen los resultados deseados.
El ejemplo ilustrado incluye al menos un amortiguador 40 de vibraciones soportado para su movimiento con la cabina 22 de ascensor. Los amortiguadores 40 de vibraciones en este ejemplo están soportados en cada lado de la cabina 22 de ascensor. Los amortiguadores 40 de vibraciones están configurados para acoplarse a una superficie estacionaria cuando la cabina 22 de ascensor está parada en un rellano para... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para controlar la posición de la cabina de un ascensor, que comprende: determinar que una cabina (22) de ascensor requiere una re-nivelación; determinar si un amortiguador (40) de vibraciones está activado o no; y ajustar una ganancia para controlar la operación de un motor (26) responsable de mover la cabina (22) del
ascensor para la re-nivelación si el amortiguador (40) de vibraciones está activado.
2. Procedimiento según la reivindicación 1, que comprende
generar una señal (68) de par motor para controlar el motor (26) para mover la cabina (22) del ascensor para realizar la re-nivelación usando la ganancia ajustada.
3. Procedimiento según la reivindicación 1 o 2, que comprende usar la ganancia ajustada al mover la cabina (22) del ascensor durante la re-nivelación; y usar una ganancia por defecto diferente durante otras condiciones de operación del ascensor.
4. Procedimiento según cualquiera de las reivindicaciones anteriores, que comprende usar una primera ganancia si el amortiguador (40) de vibraciones no está activado; y usar una segunda ganancia diferente si el amortiguador (40) de vibraciones está activado, en el que, opcionalmente, la segunda ganancia tiene un valor mayor que la primera ganancia.
5. Procedimiento según cualquiera de las reivindicaciones anteriores, que comprende
activar el amortiguador (40) de vibraciones en respuesta a la apertura de una puerta (42) de la cabina del ascensor.
6. Procedimiento según la reivindicación 5, en el que el amortiguador (40) de nivelación comprende un accionador
(46) y un miembro (48) de fricción que puede ser movido por el accionador (46) a una posición para acoplarse a una superficie (24) estacionaria para limitar una cantidad de movimiento vertical de la cabina (22) del ascensor durante la re-nivelación.
7. Procedimiento según la reivindicación 6, en el que el accionador (46) mueve el miembro (48) de fricción en una primera dirección y el miembro (48) de fricción está soportado para su movimiento pivotante con relación a la primera dirección.
8. Un sistema de posicionamiento de ascensor, que comprende: un amortiguador (40) de vibraciones que está configurado para resistir el movimiento vertical de una cabina
(22) de ascensor asociada; y un dispositivo (30) de control para controlar un motor (26) configurado para mover la cabina (22) de ascensor asociada, y caracterizado por que el dispositivo (30) de control tiene una ganancia con un valor establecido, en el que el dispositivo (30) de control está configurado para ajustar selectivamente la ganancia a partir del valor establecido durante una re-nivelación de la cabina (22) de ascensor asociada si el amortiguador (40) de vibraciones está activado.
9. Sistema de ascensor según la reivindicación 8, en el que el dispositivo (30) de control aumenta la ganancia a un segundo valor de re-nivelación, que es mayor que el valor establecido, si el amortiguador (40) de vibraciones está activado.
10. Sistema de ascensor según la reivindicación 8 o 9, en el que el controlador (30) genera una señal (68) de par motor usando la ganancia ajustada, en el que opcionalmente el controlador genera la señal de par (68) motor usando la ganancia ajustada para re-nivelar una cabina (22) de ascensor si el amortiguador (40) de vibraciones está activado y si no usa el valor establecido de la ganancia.
11. Procedimiento según las reivindicaciones 1 a 4 o sistema de ascensor según las reivindicaciones 8 a 10, en los que la ganancia es al menos una de entre una ganancia de re-nivelación o una ganancia integral proporcional de un servo de velocidad asociado con el motor (26) .
12. Sistema de ascensor según cualquiera de las reivindicaciones 8 a 11, en el que el amortiguador (40) de vibraciones está configurado para ser activado en respuesta a la apertura de una puerta (42) de la cabina (22) de ascensor asociada.
13. Sistema de ascensor según cualquiera de las reivindicaciones 8 a 12, en el que el amortiguador (40) de 5 vibraciones comprende un accionador (46) ;
un miembro (48) de fricción que está soportado para ser movido a lo largo de una primera dirección por el accionador (46) a una posición para acoplarse con una superficie (20) estacionaria, en el que el miembro (48) de fricción está soportado para moverse, de manera pivotante, con relación a la primera dirección.
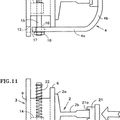
14. Procedimiento según la reivindicación 5 o sistema de ascensor según la reivindicación 13, en los que el 10 amortiguador (40) de vibraciones comprende un primer brazo (60) que es movido por el accionador (46) ;
una articulación (62) de pivote acoplada al brazo (60) para su movimiento pivotante alrededor de un eje (64) de pivote cerca de un extremo de la articulación (62) de pivote en respuesta al movimiento del primer brazo (60) ; y un segundo brazo (54) acoplado a la articulación (62) de pivote cerca de un extremo opuesto de la articulación
(62) de pivote de manera que el segundo brazo (54) se mueve en respuesta al movimiento de la articulación
(64) de pivote, en el que el miembro (48) de fricción está soportado para su movimiento con el segundo brazo
(54) y para un movimiento pivotante con relación a una dirección de movimiento del segundo brazo (54) .
15. Sistema de ascensor según cualquiera de las reivindicaciones 8 a 14, que comprende:
una cabina de ascensor que tiene el amortiguador (40) de vibraciones soportado sobre una parte de la cabina (22) de ascensor;
una disposición (28) de cableado asegurada a la cabina (22) de ascensor; y un motor (26) para mover la disposición (28) de cableado para causar el movimiento de la cabina (22) de ascensor en respuesta al dispositivo (30) de control.
Patentes similares o relacionadas:
Un dispositivo estabilizador de una cabina de ascensor, del 15 de Enero de 2020, de OTIS ELEVATOR COMPANY: Un aparato de estabilización de una cabina de ascensor , que comprende: una base montada fijamente con respecto a la cabina de ascensor, […]
 Instalación de ascensor para personas y/o cargas con al menos una cabina de ascensor, del 13 de Febrero de 2019, de INVENTIO AG: Instalación de ascensor para personas y/o cargas para la conexión de varias plantas de acceso en un edificio con una caja de ascensor , que presenta […]
Instalación de ascensor para personas y/o cargas con al menos una cabina de ascensor, del 13 de Febrero de 2019, de INVENTIO AG: Instalación de ascensor para personas y/o cargas para la conexión de varias plantas de acceso en un edificio con una caja de ascensor , que presenta […]
Instalación de ascensor con una cabina de ascensor con un dispositivo de freno dispuesto en la zona de la cabina del ascensor para la retención y frenado de la cabina de ascensor y procedimiento para la retención y frenado de tal cabina de ascensor, del 4 de Julio de 2018, de INVENTIO AG: Cabina de ascensor con una instalación de freno dispuesta en la zona de la cabina de ascensor para la retención y frenado de la misma, en la que la instalación de […]
Dispositivo de seguridad para bloquear una cabina de ascensor, del 21 de Marzo de 2018, de INVENTIO AG: Dispositivo de seguridad para bloquear una cabina de ascensor, en el que se impiden movimientos no permitidos a la cabina de ascensor y se limita […]
Instalación de ascensor para personas y/o cargas con al menos una cabina de ascensor, del 23 de Agosto de 2017, de INVENTIO AG: Instalación de ascensor para personas y/o cargas para la conexión de varias plantas de acceso en un edificio con una caja de ascensor , […]
 Instalación para un ascensor, del 1 de Febrero de 2016, de INVENTIO AG: Instalación de ascensor, con una zapata guía deslizante que puede moverse a lo largo de un carril guía y que está destinada a guiar una cabina de ascensor […]
Instalación para un ascensor, del 1 de Febrero de 2016, de INVENTIO AG: Instalación de ascensor, con una zapata guía deslizante que puede moverse a lo largo de un carril guía y que está destinada a guiar una cabina de ascensor […]
 Dispositivo para el control de la posición de parada de una cabina de ascensor, del 20 de Noviembre de 2013, de Mefortis AG: Dispositivo para el control de la posición de parada de una cabina de ascensor dentro de una tolerancia enaltura especificada respecto de un nivel […]
Dispositivo para el control de la posición de parada de una cabina de ascensor, del 20 de Noviembre de 2013, de Mefortis AG: Dispositivo para el control de la posición de parada de una cabina de ascensor dentro de una tolerancia enaltura especificada respecto de un nivel […]
 APARATO PARA LA PREVENCION DE CAIDAS DE CAJAS DE ASCENSOR, del 18 de Octubre de 2010, de OTIS ELEVATOR COMPANY: Un aparato para la prevención de caídas de cajas de ascensor provisto de un carril guía instalado verticalmente en el eje del ascensor para guiar la caja de […]
APARATO PARA LA PREVENCION DE CAIDAS DE CAJAS DE ASCENSOR, del 18 de Octubre de 2010, de OTIS ELEVATOR COMPANY: Un aparato para la prevención de caídas de cajas de ascensor provisto de un carril guía instalado verticalmente en el eje del ascensor para guiar la caja de […]