Método para simular la forma curva de un catéter y catéter de inducción magnética.
Un método para simular la forma curva de un catéter con al menos dos elementos sensores en este,
que comprende las etapas de:
generar una corriente inducida mediante los elementos sensores que atraviesan líneas magnéticas de fuerza;
extraer información espacial de los elementos sensores a partir de la información de la corriente inducida; y
calcular la forma curva del catéter con base en la información espacial y en combinación con la información característica del catéter;
la etapa de calcular la forma curva del catéter comprende establecer una función curvilínea de la forma curva del catéter,
resolver la función curvilínea del catéter por el método de aproximación por spline de energía interna mínima y obtener la forma curva del catéter.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CN2009/072122.
Solicitante: Shanghai Microport EP Medtech Co., Ltd.
Nacionalidad solicitante: China.
Dirección: Building 28, 588 Tianxiong Road, Pudong New District Shanghai 201318 CHINA.
Inventor/es: LIU,DAOZHI, YE,MING, GUO,JUNMIN, WANG,SHUN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B18/14 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 18/00 Instrumentos, dispositivos o procedimientos quirúrgicos para transferir formas de energía no mecánica hacia o desde el cuerpo (cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Sondas o electrodos a tal efecto.
- A61B5/06 A61B […] › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Dispositivos para detectar o localizar cuerpos extraños por procedimientos diferentes al uso de radiaciones (para su extracción A61B 17/50).
PDF original: ES-2545604_T3.pdf

Fragmento de la descripción:
Método para simular la forma curva de un catéter y catéter de inducción magnética
Campo técnico
La presente invención se relaciona con la industria de instrumentos médicos, y más particularmente con un método para simular la forma curva de un catéter y un catéter de inducción magnética.
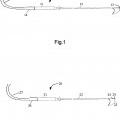
Antecedentes de la invención Los catéteres de ablación por RF se usan principalmente para mapeo electrofisiológico, estimulación cardíaca temporal, ablación por RF y similares de la arritmia cardíaca. La Figura 1 es una vista esquemática de un catéter de ablación por RF conocido el cual se indica generalmente por una número de referencia 10 y comprende, entre otros, un mango de catéter 11, un cuerpo de catéter 12, un electrodo de punta 13, un conector 14 y un cable de extensión 15.
En el tratamiento convencional de ablación por RF con catéter, mediante el catéter 10, el electrodo de punta 13 capaz de transmitir energía de RF puede insertarse de manera transvenosa o transarterial en un cuerpo humano y en un lugar del corazón bajo el monitoreo de un TV de rayos X para la ablación de un foco en el mismo. Cuando se trata la arritmia compleja, tal como fibrilación auricular, aleteo auricular y similares, es necesario conectar los puntos de ablación en línea para aislar completamente foco (s) electrofisiológico (s) anormal (es) para propósitos del tratamiento.
Durante el tratamiento anterior de ablación lineal, un operador necesita conocer las posiciones del electrodo de punta 13 y registrar las posiciones de los focos a someter a ablación para continuar con el procedimiento. En la actualidad, el aparato de mapeo tridimensional es el medio más usado para el mapeo de imágenes anatómicas tridimensionales para mostrar las posiciones del electrodo de punta 13 y los focos a someter a ablación. Una vez que se establecen las imágenes anatómicas tridimensionales, la operación bajo rayos X no es necesaria y de este modo la exposición a rayos X se reduce significativamente. Mientras tanto, en el caso donde se establecen las imágenes anatómicas tridimensionales, el tiempo de descarga de ablación se reduce, reduciendo así el riesgo de dañar accidentalmente el nodo auriculoventricular, lo cual puede facilitar ventajosamente el despliegue del catéter y la determinación precisa de las posiciones de la excitación ectópica y del catéter. Por lo tanto, las imágenes anatómicas tridimensionales mapeadas por el aparato de mapeo tridimensional son más precisas y confiables que aquellas graficadas mediante el posicionamiento de rayos X biplano convencional.
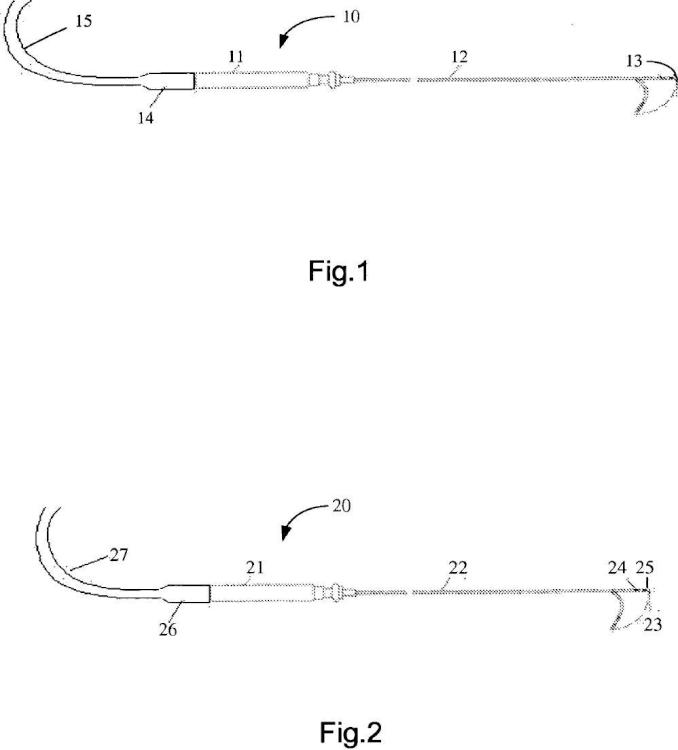
La inducción del campo eléctrico y la inducción del campo magnético son dos métodos principales de mapeo por inducción en aplicaciones clínicas para el mapeo de imágenes anatómicas tridimensionales por el aparato de mapeo tridimensional. En particular, el método de inducción del campo magnético se usa ampliamente debido a su posicionamiento preciso y excelente repetibilidad. Sin embargo, la imagen anatómica tridimensional graficada por la tecnología actual de inducción magnética tiene una limitación relativamente grande dado que sólo puede mostrar la posición del electrodo de punta 13 y no puede mostrar la forma curva del cuerpo de catéter 12 del catéter 10 en el corazón. Durante el procedimiento, el operador no puede observar visualmente la forma curva del catéter 10 en el corazón, lo que resulta en un inconveniente para el procedimiento, con lo que se reduce así radicalmente la seguridad y la controlabilidad de este. El documento US 2007/0106116 A1 describe un dispositivo de conformidad con el preámbulo de la reivindicación 15.
Resumen de la invención Un objetivo de la presente invención es proporcionar un método para simular la forma curva de un catéter con un electrodo, lo que permite mostrar la forma curva del catéter en uso y lo cual puede resultar conveniente para el procedimiento y mejorar la seguridad y controlabilidad de este.
Otro objetivo de la presente invención es proporcionar un catéter de inducción magnética el cual puede mostrar una forma curva en sí, en uso, y que puede resultar conveniente para el procedimiento y mejorar la seguridad y controlabilidad de este.
De conformidad con la presente invención, un método para simular la forma curva de un catéter el cual se proporciona con al menos dos elementos sensores, comprende: generar una corriente inducida al atravesar líneas magnéticas de fuerza con los elementos sensores; extraer información espacial de los elementos sensores a partir de información de la corriente inducida; y calcular la forma curva del catéter con base en la información espacial y en combinación con información característica del catéter.
Calcular la forma curva del catéter comprende establecer una función curvilínea de la forma curva del catéter, resolver la
función curvilínea del catéter por el método de aproximación por spline de energía interna mínima y obtener la forma curva del catéter.
Preferentemente, calcular la forma curva del catéter comprende establecer una función curvilínea de la forma curva del
catéter para cada segmento del catéter entre dos elementos sensores adyacentes, resolver la función curvilínea de cada segmento del catéter por el método de aproximación por spline de energía interna mínima, obtener la forma curva de cada segmento del catéter, y después obtener la forma curva completa del catéter.
Preferentemente, el método de aproximación por spline de energía interna mínima comprende adicionalmente normalizar la curva que representa la forma curva del catéter entre dos elementos sensores adyacentes; establecer una función curvilínea p (t) = at3+ bt2+ ct + d con una longitud de arco t de la curva como una variable, en la cual t está en un intervalo de [0, 1], y a, b, c y d son cuatro desconocidos; calcular los valores de p (0) , p (1) y
con base en la información espacial y la información característica; y resolver la función curvilínea p (t) mediante la sustitución de los valores de p (0) , p (1) y en la función curvilínea p (t) .
Preferentemente, el método de la curva de energía interna mínima se usa para resolver los valores de Preferentemente, usar el método de la curva de energía interna mínima para resolver los valores de comprende suponer que p' (0) =a0v0, p' (1) = a1v1, en las cuales a0, a1 son longitudes de vectores tangentes a dos extremos de la curva, y v0, v1 son las direcciones de los dos extremos de la curva; suponer que f (a0, a1) =E -λL, en la cual E representa la energía interna de la curva, L representa una longitud de la curva, λ es un coeficiente, resolver esto y obtener a0, a1; sustituir a0, a1y v0, v1 en p' (0) = a0v0, p' (1) = a1v1, y obtener los valores de .
Preferentemente, la longitud L de la curva es una condición de restricción cuando la energía interna E de la curva toma 25 el valor mínimo.
Preferentemente, la forma curva del catéter se muestra.
Preferentemente, un lado interno y un lado externo del catéter se muestran con diferentes colores.
Preferentemente, un ancho del catéter mostrado se establece con base en un diámetro real del catéter.
Preferentemente, uno de los al menos dos elementos sensores se dispone en una punta del catéter.
Preferentemente, la información espacial comprende información de la posición tridimensional e información de la dirección de los elementos sensores.
Preferentemente, la información característica del catéter comprende el material, la longitud del catéter en sí y/o un intervalo entre dos elementos sensores.
Preferentemente, los elementos sensores son sensores magnéticos.
Preferentemente, los sensores magnéticos comprenden sensores magnéticos de cinco grados de libertad y/o sensores magnéticos de seis grados de libertad.
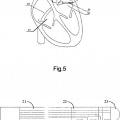
De conformidad con la presente invención, un catéter de inducción magnética comprende un cuerpo de catéter; al menos dos elementos sensores dispuestos respectivamente en el catéter para atravesar líneas magnéticas de fuerza para generar una corriente inducida; un dispositivo de extracción de señal para extraer información espacial de los elementos sensores a partir de la información de la corriente inducida; un dispositivo de simulación y procesamiento 50 para calcular la forma curva del catéter con base en la información espacial y en combinación con la información característica del catéter.
El dispositivo de simulación y procesamiento comprende adicionalmente un módulo de cálculo para establecer una función curvilínea de la forma curva del catéter, resolver la función curvilínea del catéter por el método de aproximación... [Seguir leyendo]
Reivindicaciones:
1. Un método para simular la forma curva de un catéter con al menos dos elementos sensores en este, que comprende las etapas de:
generar una corriente inducida mediante los elementos sensores que atraviesan líneas magnéticas de fuerza; extraer información espacial de los elementos sensores a partir de la información de la corriente inducida; y calcular la forma curva del catéter con base en la información espacial y en combinación con la información característica del catéter;
la etapa de calcular la forma curva del catéter comprende establecer una función curvilínea de la forma curva del catéter, resolver la función curvilínea del catéter por el método de aproximación por spline de energía interna mínima y obtener la forma curva del catéter.
2. El método como se reivindica en la reivindicación 1, en donde la etapa de calcular la forma curva del catéter comprende establecer una función curvilínea de la forma curva para cada segmento del catéter entre dos elementos sensores adyacentes, resolver la función curvilínea de cada segmento del catéter mediante el método de aproximación por spline de energía interna mínima, obtener la forma curva de cada segmento del catéter y después la forma curva completa del catéter.
3. El método como se reivindica en la reivindicación 2, en donde el método de aproximación por spline de energía interna mínima comprende adicionalmente:
normalizar la curva de la forma curva del catéter entre dos elementos sensores adyacentes; 25 establecer una función curvilínea p (t) = at3 + bt2 + ct + d con una longitud de arco t de la curva como una variable, en la cual t está en un intervalo de [0, 1], y a, b, c y d son cuatro desconocidos; calcular los valores de p (0) , p (1) y
con base en la información espacial y la información característica; y resolver la función curvilínea p (t) mediante la sustitución de los valores de p (0) , p (1) y
en la función 30 curvilínea p (t) .
4. El método como se reivindica en la reivindicación 3, en donde el método de la curva de energía interna mínima se usa para resolver los valores de .
5. El método como se reivindica en la reivindicación 4, en donde la etapa de usar el método de la curva de energía interna mínima para resolver los valores de comprende:
suponer que p' (0) =a0v0, p' (1) =a1v1, en las cuales a0, a1 son longitudes de vectores tangentes a dos extremos de la curva, y v0, v1, son los vectores tangentes de los dos extremos de la curva; 40 suponer que f (a0, a1) = E -λL, en la cual E representa la energía interna de la curva, L representa una longitud de la curva, y λ es un coeficiente, resolver esto y obtener a0, a1 ;
sustituir a0, a1 y v0, v1 en p' (0) =a0v0 , p' (1) =a1v1 y obtener los valores de 6. El método como se reivindica en la reivindicación 5, en donde la longitud L de la curva es una condición de 45 restricción cuando la energía interna E de la curva toma el valor mínimo.
7. El método como se reivindica en la reivindicación 1, que comprende adicionalmente mostrar la forma curva del catéter.
8. El método como se reivindica en la reivindicación 7, que comprende adicionalmente mostrar un lado interno y un lado externo del catéter con colores diferentes.
9. El método como se reivindica en la reivindicación 7, que comprende adicionalmente establecer un ancho del catéter a mostrar con base en un diámetro real del catéter.
10. El método como se reivindica en la reivindicación 1 o 2, en donde uno de los al menos dos elementos sensores se dispone en una punta del catéter a una distancia corta del electrodo de punta.
11. El método como se reivindica en la reivindicación 1 o 2, en donde la información espacial comprende 60 información de la posición tridimensional e información de la dirección de los elementos sensores.
12. El método como se reivindica en la reivindicación 1 o 2, en donde la información característica del catéter comprende material, longitud del catéter en sí y/o un intervalo entre dos elementos sensores.
13. El método como se reivindica en la reivindicación 1 o 2, en donde los elementos sensores son sensores 5 magnéticos.
14. El método como se reivindica en la reivindicación 13, en donde los sensores magnéticos comprenden sensores magnéticos de cinco grados de libertad y/o sensores magnéticos de seis grados de libertad.
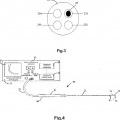
15. Un catéter de inducción magnética (20) que comprende:
un cuerpo de catéter (22) , al menos dos elementos sensores (24, 25) dispuestos respectivamente en el catéter para atravesar líneas magnéticas de fuerza para generar una corriente inducida;
un dispositivo de extracción de señal (40) para extraer información espacial de los elementos sensores a partir de la información de la corriente inducida; un dispositivo de simulación y procesamiento (50) para calcular la forma curva del catéter con base en la información espacial y en combinación con información característica del catéter; el dispositivo de simulación y procesamiento comprende adicionalmente un módulo de cálculo para establecer
una función curvilínea de la forma curva del catéter, caracterizado porque el módulo de cálculo se adapta para resolver la función curvilínea del catéter mediante el método de aproximación por spline de energía interna mínima y obtener la forma curva del catéter.
16. El catéter como se reivindica en la reivindicación 15, en donde uno de los al menos dos elementos sensores se 25 dispone en una punta del catéter a una distancia corta del electrodo de punta.
17. El catéter como se reivindica en la reivindicación 15, en donde los elementos sensores son sensores magnéticos.
18. El catéter como se reivindica en la reivindicación 17, en donde los sensores magnéticos comprenden sensores magnéticos de cinco grados de libertad y/o sensores magnéticos de seis grados de libertad.
19. El catéter como se reivindica en la reivindicación 17, en donde un cable del sensor magnético se envuelve con una malla de alambre de plata.
Patentes similares o relacionadas:
Dispositivos médicos inflables, del 29 de Julio de 2020, de Loma Vista Medical, Inc: Balón inflable, que comprende: un balón de base que tiene una sección cilíndrica y una sección cónica; al menos una fibra (86a) circunferencial […]
Estructura de aguja para realizar biopsias por punción, del 8 de Julio de 2020, de Creo Medical Limited: Aparato quirúrgico para introducir material a través de una aguja en un tejido biológico, comprendiendo el aparato: una fuente de alimentación para suministrar […]
Aparato electroquirúrgico para el suministro de energía de radiofrecuencia y energía de microondas, del 8 de Julio de 2020, de Creo Medical Limited: Aparato electroquirúrgico que comprende: un generador electroquirúrgico dispuesto para generar energía electromagnética de radiofrecuencia […]
Electrodo bipolar para ablación por radiofrecuencia, del 1 de Julio de 2020, de STARmed Co., Ltd: Un electrodo bipolar para ablación por radiofrecuencia, comprendiendo el electrodo: un cuerpo cilíndrico provisto de una primera y […]
Catéter con ramas transversales, del 24 de Junio de 2020, de Biosense Webster (Israel), Ltd: Un aparato, que comprende: un tubo de inserción flexible , que tiene un segmento distal que está configurado para insertarse en un órgano del cuerpo; […]
Aparato para tratar un tumor mediante un campo eléctrico, del 10 de Junio de 2020, de Novocure GmbH: Una prenda de vestir que incorpora un aparato para destruir selectivamente células en división en un área diana de un tejido, teniendo las células […]
Aparato para tratar un tumor mediante un campo eléctrico, del 10 de Junio de 2020, de Novocure GmbH: Un aparato para destruir selectivamente células en división en un área diana de tejido, teniendo las células en división componentes intracelulares […]
Aparato para tratar un tumor mediante un campo eléctrico, del 10 de Junio de 2020, de Novocure GmbH: Un aparato para destruir selectivamente células en división en tejido que se va a tratar por debajo de la piel, teniendo las células en división componentes intracelulares […]