Medio de accionamiento y accionamiento de cadenas.
Medio de accionamiento para el accionamiento con compensación de polígono de una rueda de cadenas,
que comprende:
- dos ruedas de medio de tracción (1, 2),
- un medio de tracción (3), que se mueve sobre éstas, con un ramal superior (31) y un ramal inferior (32) y
- un medio tensor que actúa sobre el medio de tracción (3),
comprendiendo el medio tensor:
- una primera rueda de compensación excéntrica (4) que puede entrar en contacto con el ramal superior (31) y
- una segunda rueda de compensación excéntrica (5) que puede entrar en contacto con el ramal inferior (32), caracterizado por que el medio tensor comprende además:
- una única biela oscilante (6) que está diseñada para el alojamiento giratorio tanto de la primera rueda de compensación (4) como de la segunda rueda de compensación (5),
- estando apoyada la biela oscilante (6) con posibilidad de movimiento pivotante en un apoyo estacionario.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/009653.
Solicitante: KETTEN-WULF BETRIEBS-GMBH.
Nacionalidad solicitante: Alemania.
Dirección: ZUM HOHENSTEIN 15 59889 ESLOHE-KÜCKELHEIM ALEMANIA.
Inventor/es: GROBBEL,BURKHARD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H7/06 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 7/00 Transmisiones para transmitir un movimiento por órganos flexibles sin fin (particulares para transmitir un movimiento rotativo con relación de velocidad variable o para invertir un movimiento rotativo F16H 9/00). › por cadenas.
- F16H7/08 F16H 7/00 […] › Medios para hacer variar la tensión de las correas, de las cuerdas o de las cadenas (poleas regulables F16H 55/52).
- F16H7/12 F16H 7/00 […] › de una polea loca.
PDF original: ES-2543688_T3.pdf
Fragmento de la descripción:
Medio de accionamiento y accionamiento de cadenas La presente invención se refiere a un medio de accionamiento para el accionamiento con compensación de polígono de una rueda de cadenas de acuerdo al preámbulo de la reivindicación 1, así como a un accionamiento de cadenas de acuerdo con el preámbulo de la reivindicación 13.
Con el fin de explicar los conceptos de "efecto de polígono" y "compensación de polígono" se aclara primero lo siguiente.
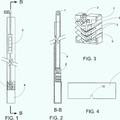
En la figura 1 se muestra esquemáticamente una cadena articulada G y una rueda de cadenas R rodeada en parte por la misma. La cadena articulada G comprende eslabones de cadena K, unidos entre sí de manera articulada, que están unidos entre sí de manera articulada mediante un punto de giro P. La rueda de cadenas K, representada a modo de ejemplo, presenta 8 dientes Z, entre los que están dispuestos huecos de dientes, en los que pueden engranar los puntos de giro P. El paso angular entre dos dientes o entre dos huecos de dientes es de 45º en el ejemplo representado.
En la figura 1 se muestra además en el lado inferior de la rueda de cadenas un ángulo de entrada que puede ser generado, por ejemplo, por una guía que desvía la cadena articulada G. El ángulo de entrada se mide entre la dirección de salida real de la cadena articulada G y la perpendicular S sobre la línea de unión entre el punto de separación A de la cadena articulada G respecto a la rueda de cadenas R y el eje de giro D de la rueda de cadenas R. El ángulo de entrada es aproximadamente de 11º en el ejemplo representado.
En la figura 1 está representado un ángulo de abrazo momentáneo que corresponde al ángulo circunferencial entre dos puntos de separación A de la cadena articulada G respecto a la rueda de cadenas R y que es igual a 180º en el caso representado. Si un eslabón de la cadena K se levanta de la rueda de cadenas R, se reduce bruscamente el ángulo de abrazo momentáneo , porque en presencia de un ángulo de entrada diferente arriba y abajo, un eslabón de cadena K se levanta, por ejemplo, sobre el lado superior, pero al mismo tiempo el eslabón siguiente de cadena K no descansa aún sobre el lado inferior. Por tanto, a continuación se parte de un ángulo de abrazo medio mayor o igual que el ángulo de abrazo mínimo y menor o igual que el ángulo de abrazo máximo.
Además, en el lado superior de la rueda de cadenas R está representado un brazo de palanca efectivo Heff que corresponde a la distancia perpendicular entre la línea de actuación W de la fuerza, en particular la fuerza de tracción de la cadena articulada G, y el eje de giro D de la rueda de cadenas R. Al igual que el ángulo de abrazo momentáneo , el brazo de palanca efectivo Heff también oscila durante el movimiento de la cadena articulada debido a la separación por eslabones de la cadena articulada, en particular debido al apoyo poligonal (en forma de polígono) de la cadena alrededor de la rueda de cadenas. En el lado inferior de la rueda de cadenas R, el brazo de palanca efectivo Heff es ligeramente menor, porque debido a la línea de actuación W un poco inclinada de la fuerza de la cadena articulada G, el brazo de palanca efectivo Heff no discurre ya a través del punto de separación A.
Esto da lugar a las desventajas siguientes en caso del uso técnico de una rueda de cadenas de este tipo.
En las escaleras mecánicas o los pasillos rodantes, sus escalones o placas se accionan generalmente, en particular por ambos lados, mediante cadenas transportadoras que están configuradas, por decirlo así, como cadenas de escalones o cadenas de placas y están fijadas también en las mismas. Normalmente las cadenas transportadoras tienen tres o cuatro pasos, es decir, también tres o cuatro articulaciones, por escalón. Las ruedas de cadenas utilizadas tienen aproximadamente 16 a 25 dientes. Este número relativamente alto se selecciona para minimizar el llamado efecto de polígono.
El efecto de polígono resulta del brazo de palanca efectivo Heff oscilante (véase figura 1) . Las ruedas de cadenas son accionadas normalmente a una velocidad angular constante. La velocidad de las cadenas de escalones oscila debido a los brazos de palanca efectivos oscilantes. Debido a la aceleración y al retardo constantes de las masas móviles (cadenas, ejes, escalones) se generan fuerzas de masa que son transmitidas como fuerzas o como pares de giro perturbadores a las cadenas de escalones/placas o al accionamiento y que provocan aquí una reducción parcial de la vida útil o representan un orden de magnitud que se debe tener en cuenta en el diseño, en particular de los componentes de accionamiento. Además, las partes móviles en una escalera mecánica junto con la estructura de acero circundante representan un sistema de masa y muelle con capacidad oscilante. En particular, las cadenas se deben ver aquí como muelles, y los escalones, los ejes (si están presentes) , los rodillos, las personas transportadas (sobre los escalones o las placas) y a su vez las cadenas se deben ver como masas. Este sistema de masa y muelle puede tener, de acuerdo con los parámetros, unos puntos de funcionamiento muy desfavorables en dependencia del número de dientes de las ruedas de cadenas, de la velocidad de marcha, así como de la carga.
Con el fin de atenuar el efecto de polígono, en el estado de la técnica se han propuesto medidas para la compensación del polígono.
En la práctica, este comportamiento se contrarresta, por ejemplo, mediante la reducción de los pasos de cadena y el aumento del número de dientes. A medida que se reducen los pasos y aumenta el número de dientes, disminuye el efecto de polígono, hasta conseguirse finalmente una medida, en la que el efecto de polígono es tan pequeño en la práctica, es decir, el movimiento de las cadenas/los escalones/las placas es tan uniforme que el efecto de polígono prácticamente no molesta, aunque sigue estando presente.
En la zona de las ruedas de cadenas se han instalado también guías que provocan una entrada tangencial de la cadena sobre las ruedas de cadenas. El objetivo principal de esta medida es reducir el ruido de entrada de la cadena sobre las ruedas de cadenas. En este caso se reduce también el efecto de polígono, pero no se compensa.
Sin embargo, el modo de construcción convencional con una cantidad relativamente pequeña de pasos de cadena y un número de dientes relativamente grande de la rueda de cadenas tiene desventajas decisivas.
En primer lugar se deben mencionar los altos costes de la cadena de escalones/placas. Cuantos más pasos tiene la misma, más articulaciones o rodillos hay por escalón o por metro y más elevados son sus costes. Además, por cada escalón/placa existe un mayor número de puntos sometidos a desgaste. Durante el periodo de funcionamiento de la escalera mecánica, un criterio muy importante es el mantenimiento lo más prolongado posible del intersticio máximo admisible entre escalones/placas. Condicionado por el alto número de dientes de las ruedas de cadenas, éstas tienen un diámetro relativamente grande y necesitan mucho espacio constructivo, en particular para la estación de accionamiento. De esta manera se pierde un espacio valioso en los edificios. Condicionado por los diámetros grandes, son necesarios pares de accionamiento altos, lo que implica costes correspondientes para los accionamientos.
Del estado de la técnica son conocidas algunas otras medidas para la compensación del efecto de polígono.
Del documento de tipo genérico WO03/036129A1 son conocidos accionamientos capaces de accionar cadenas con compensación de polígono. Esto significa que la rueda de cadenas de accionamiento se acciona a una velocidad angular variable de tal modo que la cadena, accionada por ésta, se mueve a una velocidad constante o casi constante. Una parte de este accionamiento de cadenas con compensación de polígono funciona según el principio de cambiar periódicamente la longitud efectiva del ramal de carga.
En el documento DE102006036353.1A1 se describe una escalera mecánica que mediante el uso de un accionamiento con compensación de polígono permite accionar una cadena de escalones/cadena de escalera mecánica con un paso de cadena ampliado y ruedas de cadenas con un número de dientes reducido. En particular, el paso de la cadena es aquí de 50% o 100% del paso de escalones.
En la práctica existe, sin embargo, la necesidad de accionar de manera reversible transportadores o escaleras mecánicas/pasillos rodantes, es decir, estos tienen que poder moverse hacia delante y también hacia atrás. Para esto es necesario un accionamiento de cadenas reversible, en particular un medio de accionamiento reversible, que pueda accionar, por ejemplo, una escalera mecánica tanto hacia... [Seguir leyendo]
Reivindicaciones:
1. Medio de accionamiento para el accionamiento con compensación de polígono de una rueda de cadenas, que comprende:
- dos ruedas de medio de tracción (1, 2) , -un medio de tracción (3) , que se mueve sobre éstas, con un ramal superior (31) y un ramal inferior (32) y -un medio tensor que actúa sobre el medio de tracción (3) ,
comprendiendo el medio tensor:
- una primera rueda de compensación excéntrica (4) que puede entrar en contacto con el ramal superior (31) y -una segunda rueda de compensación excéntrica (5) que puede entrar en contacto con el ramal inferior (32) , caracterizado por que el medio tensor comprende además:
- una única biela oscilante (6) que está diseñada para el alojamiento giratorio tanto de la primera rueda de compensación (4) como de la segunda rueda de compensación (5) , -estando apoyada la biela oscilante (6) con posibilidad de movimiento pivotante en un apoyo estacionario.
2. Medio de accionamiento de acuerdo con la reivindicación 1, caracterizado por que las ruedas de compensación (4, 5) presentan un eje de giro (45) y una superficie de rodadura (41, 42, 43, 44) para el medio de tracción (3) , estando previsto al menos un primer radio (r11, r21) entre el eje de giro y la superficie de rodadura y un segundo radio (r12, r22) , entre el eje de giro (45) y la superficie de rodadura (41, 42, 43, 44) , siendo el primer radio distinto al segundo radio.
3. Medio de accionamiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que las ruedas de compensación (4, 5) presentan al menos una, preferentemente cuatro secciones de superficie de rodadura (41, 42, 43, 44) , estando previsto al menos un primer radio (r11, r21) entre el eje de giro y la sección de superficie de rodadura y un segundo radio (r12, r22) , entre el eje de giro (45) y la sección de superficie de rodadura (41, 42, 43, 44) , siendo el primer radio distinto al segundo radio.
4. Medio de accionamiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que las secciones de superficie de rodadura (41, 42, 43, 44) tienen una configuración convexa.
5. Medio de accionamiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que las ruedas de compensación son ruedas dentadas, correspondiendo la superficie de rodadura o la sección de superficie de rodadura para el medio de tracción al círculo primitivo de la rueda dentada.
6. Medio de accionamiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que la primera rueda de compensación (4) y la segunda rueda de compensación (5) tienen una configuración idéntica.
7. Medio de accionamiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que la biela oscilante (6) presenta un primer brazo de palanca (61) y un segundo brazo de palanca (62) , estando alojadas con posibilidad de giro la primera rueda de compensación (4) en el extremo del primer brazo de palanca (61) y la segunda rueda de compensación (5) , en el extremo del segundo brazo de palanca (62) , estando previsto entre los brazos de palanca (61, 62) el apoyo para la fijación con posibilidad de movimiento pivotante de la biela oscilante (6) .
8. Medio de accionamiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que el apoyo está formado por un pivote (8) y un taladro (67) en la biela oscilante (6) .
9. Medio de accionamiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que el pivote (8) está dispuesto sobre un eje geométrico (68) situado entre los ejes de giro de la primera rueda de medio de tracción (1) y la segunda rueda de medio de tracción (2) .
10. Medio de accionamiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que la biela oscilante está provista de al menos otro taladro (64) que puede crear una posición alternativa del apoyo junto con el pivote (8) .
11. Medio de accionamiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que pueden estar previstos otros taladros posibles para el alojamiento pivotante de la biela oscilante en el pivote sobre un eje central que se extiende a través de los puntos centrales del taladro (67) y del taladro (64) .
12. Medio de accionamiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que la biela oscilante (6) puede pivotar en un ángulo de pivotado () alrededor del apoyo, estando diseñados el apoyo, la biela oscilante (6) , las ruedas de compensación (4, 5) y el medio de tracción (3) de manera que en caso de pivotar la
biela oscilante (6) en el ángulo de pivotado () se produce una torsión de las ruedas de compensación (4, 5) en un ángulo de torsión () .
13. Accionamiento de cadenas que comprende al menos:
- una rueda de cadenas (7) y -un medio de accionamiento, siendo accionada la rueda de cadenas (7) por el medio de accionamiento,
caracterizado por que
el medio de accionamiento es un medio de accionamiento de acuerdo con al menos una de las reivindicaciones 1 a 12.
14. Accionamiento de cadenas de acuerdo con la reivindicación 13, caracterizado por que el accionamiento de cadenas presenta otra rueda de cadenas, estando colocada una cadena transportadora alrededor de la rueda de cadenas (7) y de la otra rueda de cadenas y estando provista la cadena transportadora de una cantidad de piezas montadas, en particular escalones de escalera mecánica o placas.
15. Accionamiento de cadenas de acuerdo con una de las reivindicaciones 13 o 14, caracterizado por que el ángulo de torsión de las ruedas de compensación (4, 5) corresponde a la mitad del paso angular de la rueda de cadenas transportadoras (7) , multiplicado por el número de dientes de la rueda de medio de tracción (2) acoplada a la rueda de cadenas transportadoras (7) y dividido entre el número de dientes de las ruedas de compensación (4, 5) .
Patentes similares o relacionadas:
Soporte de péndulo sin holgura en el tensor de desacoplamiento, del 24 de Junio de 2020, de Schaeffler Technologies AG & Co. KG: Tensor de péndulo para un accionamiento de mecanismo de tracción sin fin de un motor de combustión interna, con una unidad base y un brazo tensor en forma de anillo […]
Tensor de correa de generador, del 29 de Octubre de 2018, de Schaeffler Technologies AG & Co. KG: Transmisión de correa de accionamiento de generador de un motor de combustión interna que contiene una disposición de generador que presenta un generador con una […]
Dispositivo de ajuste de tensión, del 25 de Octubre de 2018, de Gates Corporation: Un dispositivo de ajuste de tensión, , que comprende: un brazo oscilante que se fija de forma giratoria a través de un conjunto […]
 Dispositivo de tensado de correa para un persiana hueca, del 27 de Septiembre de 2018, de Zhang, Xuezhong: Un dispositivo de tensado de correa para una persiana hueca que comprende:
un asiento de soporte equipado con un engranaje de correa inferior en la porción superior […]
Dispositivo de tensado de correa para un persiana hueca, del 27 de Septiembre de 2018, de Zhang, Xuezhong: Un dispositivo de tensado de correa para una persiana hueca que comprende:
un asiento de soporte equipado con un engranaje de correa inferior en la porción superior […]
Motorreductor, del 6 de Junio de 2018, de e-mec S.R.L: Motorreductor. Un motorreductor para transferir el movimiento generado por un órgano motor a un aparato que comprende un árbol motor, […]
Sistema y método para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 3 de Enero de 2018, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado de detección […]
Tensor, del 14 de Diciembre de 2016, de Gates Corporation (a Delaware corporation): Un tensor que comprende: una base ; un primer montaje tensor montado en la base , comprendiendo el primer montaje tensor un primer brazo […]
Dispositivo tensor de correa para un accionamiento de correa y disposición de máquina con dispositivo tensor de correa, del 28 de Septiembre de 2016, de MUHR UND BENDER KG: Dispositivo tensor de correa para un mecanismo de correa, en el que el mecanismo de correa presenta al menos un equipo con una carcasa , un árbol de […]