Dispositivo y método para colocar envases de tipo plegable en una unidad de distribución.
Un dispositivo para colocar envases (2) llenos y cerrados herméticamente de un tipo plegable en una unidad de distribución (3),
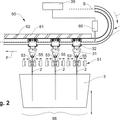
donde dichos envases (2) se mueven hasta una posición de embalaje (B), en la cual se suspenden y disponen los envases (2) a lo largo de un eje longitudinal (A1) horizontal que se extiende en la dirección general de alimentación de los envases (2) hasta la posición de embalaje (B), estando el dispositivo
caracterizado por:
una unidad de agarre (6) con un número de pares de dedos (14) que se corresponde con el número de envases (2) en la posición de embalaje (B), teniendo cada par de dedos (14), en un estado en el que no existe agarre de la unidad de agarre (6), un hueco entre los dedos (17) que permite que pase un envase (2),
dicha unidad de agarre (6) se puede llevar hasta un estado de agarre, en el cual cada par de dedos (14) está dispuesto para realizar un movimiento de apriete con el fin de sujetar un envase (2) con una fuerza de apriete tal que los contenidos del envase (2) creen una distribución de presión opuesta interior que se extiende entre los dedos (15) de dicho par de dedos (14) para proporcionar un agarre bien definido.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2007/000983.
Solicitante: ECOLEAN AB.
Nacionalidad solicitante: Suecia.
Dirección: Box 812 251 08 Helsingborg SUECIA.
Inventor/es: GUSTAFFSON,PER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B35/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 35/00 Suministro, alimentación, disposición u orientación de artículos a ser empaquetados. › por zarpas.
- B65B35/36 B65B 35/00 […] › por zarpas.
- B65B5/08 B65B […] › B65B 5/00 Embalaje de objetos individuales en receptáculo o recipientes, p. ej. sacos, bolsas, cajas, cartones, latas, tarros. › Embalaje de grupos de objetos, siendo cada grupo sujetado o guiado individualmente para ser transferido al receptáculo o recipiente.
PDF original: ES-2541452_T3.pdf
Fragmento de la descripción:
Dispositivo y método para colocar envases de tipo plegable en una unidad de distribución Campo de la invención La presente invención se refiere a un dispositivo y un método para colocar envases técnicos llenos y cerrados herméticamente en una unidad de distribución, y más específicamente un dispositivo y un método dispuestos para manipular envases que son de un tipo plegable y que están suspendidos y dispuestos uno tras otro a lo largo de un eje longitudinal.
Antecedentes En la industria alimentaria, los envases que se han llenado y cerrado herméticamente en una máquina de envasado se suministran habitualmente a una cinta transportadora para un posterior transporte hasta un dispositivo de embalaje de los envases.
El embalaje puede comprender, por ejemplo, colocar los envases en una unidad de distribución, tal como una caja Si los envases están fabricados con un material de embalaje rígido, tal como el cartón, el posicionamiento de los envases se puede realizar frenando un envase delantero, después de lo cual los envases posteriores forman una línea después del envase frenado mientras simultáneamente se alinean. La rigidez del tipo de envase en combinación con su forma propicia este alineamiento. Posteriormente, se puede colocar el grupo alineado de envases en la unidad de distribución mediante un proceso automatizado.
Sin embargo, un envase utilizado cada vez más frecuentemente es de un tipo plegable. Dichos envases están fabricados con un material de embalaje flexible y por tanto no tienen la misma estructura rígida que el tipo de envase descrito anteriormente y por lo tanto no se pueden alinear ni posicionar del modo descrito anteriormente.
Por lo tanto se requiere un trabajo manual o la utilización de un dispositivo de embalaje robotizado, para colocar los envases de un tipo plegable en una caja.
Estos dos métodos de embalaje de envases llenos y cerrados herméticamente de tipo plegable dan como resultado unos costes relativamente altos.
El documento EP 1647485 describe un dispositivo para colocar envases llenos y cerrados herméticamente de un tipo plegable en una unidad de distribución, donde dichos envases se mueven hasta una posición de embalaje, en la cual se suspenden y disponen los envases a lo largo de un eje horizontal, longitudinal a la dirección general de alimentación de los envases hasta la posición de embalaje. El dispositivo comprende una unidad de agarre con un número de elementos de agarre que se corresponde con el número de envases.
Compendio de la invención En vista de lo mencionado anteriormente, un objeto de la presente invención es proporcionar un dispositivo para colocar envases de un tipo plegable en una unidad de distribución, donde dicho dispositivo es comparativamente simple y, por tanto, económico.
También es un objeto de la presente invención proporcionar un método que de una manera simple y racional permita colocar envases de un tipo plegable que están suspendidos y dispuestos uno detrás de otro en una unidad de distribución.
De acuerdo con la presente invención, para lograr los objetivos anteriores, y también otros objetivos que resultarán evidentes a partir de la siguiente descripción, se proporcionan un dispositivo con las características definidas en la reivindicación 1 y un método con las características definidas en la reivindicación 18. En las reivindicaciones 2-17 se definirán algunas realizaciones del dispositivo que son dependientes de la reivindicación 1, y en las reivindicaciones 19-23 se definirán algunas reivindicaciones del método que son dependientes de la reivindicación 18.
Más específicamente, de acuerdo con la presente invención se proporciona un dispositivo para colocar envases llenos y cerrados herméticamente de un tipo plegable en una unidad de distribución, donde dichos envases se mueven hasta una posición de embalaje, en la cual los envases están suspendidos y dispuestos a lo largo de un eje longitudinal que comprende una unidad de agarre con cierto número de pares de dedos que se corresponde con el número de envases en la posición de embalaje, donde cada par de dedos, en un estado en el que no existe agarre de la unidad de agarre, tiene un hueco entre los dedos que permite que pase un envase. La unidad de agarre se puede llevar hasta un estado de agarre, en el cual cada par de dedos se dispone para realizar un movimiento de apriete con el fin de sujetar un envase.
Como resultado, se proporciona un dispositivo simple y económico para colocar los envases suspendidos de un tipo plegable en una unidad de distribución. Siendo el dispositivo capaz de manipular envases que están suspendidos y formando una línea a lo largo de un eje longitudinal, se puede utilizar el posicionamiento exacto de los envases que
se logra en una máquina de envasado. Más específicamente, se utiliza este posicionamiento exacto en una unidad de agarre que es de construcción relativamente simple. La unidad de agarre comprende unos pares de dedos que en un estado de agarre están dispuestos para hacer un movimiento de apriete con el fin de que cada par sujete un envase. Al ser el envase de un tipo plegable, cada envase se deformará en la parte agarrada. Esto hace posible sujetar el envase con una fuerza de apriete tal, que los contenidos del envase crean una distribución de presión interior opuesta con el fin de proporcionar un agarre bien definido.
La unidad de agarre del dispositivo de la inventiva se puede mover entre una posición de agarre y una posición de colocación, en dicha posición de agarre la unidad de agarre está dispuesta para sujetar los envases en la posición de embalaje al llevar la unidad de agarre hasta su estado de agarre, y en dicha posición de colocación la unidad de agarre está dispuesta para colocar los envases sujetos en la unidad de distribución.
La unidad de agarre del dispositivo se puede mover a lo largo de un eje de movimiento que es perpendicular a dicho eje longitudinal, pudiéndose mover la unidad de agarre entre la posición de agarre y la posición de colocación al moverse a lo largo de dicho eje de movimiento.
La unidad de agarre del dispositivo también puede pivotar en torno a un eje de pivotamiento que es paralelo a dicho eje longitudinal. La unidad de agarre se puede mover a lo largo de un eje de movimiento que es perpendicular a dicho eje de pivotamiento y que coincide con un plano definido por dicho eje longitudinal y dicho eje de pivotamiento, pudiéndose mover la unidad de agarre entre la posición de agarre y la posición de colocación al pivotar en torno al eje de pivotamiento y moverse a lo largo del eje de movimiento.
Por tanto, el dispositivo puede pivotar en torno a un eje de pivotamiento y móvil a lo largo de un eje de movimiento que se puede extender perpendicularmente a dicho eje de pivotamiento. Estos grados de libertad hacen posible sujetar los envases suspendidos y colocar dichos envases en un estado acostado en la unidad de distribución.
En una realización de la presente invención, la unidad de agarre se encuentra en su posición de agarre dispuesta para sujetar los envases en la posición de embalaje solamente desde un lado del envase. La unidad de agarre puede estar dispuesta, a fin de moverse desde la posición de agarre hasta la posición de colocación, para pivotar en torno al eje de pivotamiento en una primera dirección de pivotamiento y para moverse a lo largo del eje de movimiento en una primera dirección de movimiento. Para moverse desde la posición de colocación hasta la posición de agarre, la unidad de agarre puede estar dispuesta para pivotar en torno al eje de pivotamiento en una segunda dirección de pivotamiento, opuesta a la primera dirección de pivotamiento, y para moverse a lo largo del eje de movimiento en una segunda dirección de movimiento, opuesta a la primera dirección de movimiento. Esto hace posible garantizar que los envases colocados en la unidad de distribución adquieran la misma orientación. Esto puede ser ventajoso si la unidad de distribución también está adaptada para que sirva como una unidad de exposición de los envases, por ejemplo, en una tienda de alimentos. Al elevar la unidad de distribución, los envases se pueden orientar en una posición vertical y al retirar una parte de pared de la unidad de distribución, se facilita un acceso sencillo a los envases verticales.
Como alternativa, el dispositivo puede comprender un elemento de manipulación que está dispuesto para girar la unidad de distribución (la caja) 180º cada vez que la unidad de agarre haya colocado los envases en dicha unidad de distribución. Aunque la unidad de agarre sujeta los envases en la posición de embalaje desde el mismo lado del envase, a los envases colocados en... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo para colocar envases (2) llenos y cerrados herméticamente de un tipo plegable en una unidad de distribución (3) , donde dichos envases (2) se mueven hasta una posición de embalaje (B) , en la cual se suspenden y disponen los envases (2) a lo largo de un eje longitudinal (A1) horizontal que se extiende en la dirección general de alimentación de los envases (2) hasta la posición de embalaje (B) , estando el dispositivo caracterizado por:
una unidad de agarre (6) con un número de pares de dedos (14) que se corresponde con el número de envases (2) en la posición de embalaje (B) , teniendo cada par de dedos (14) , en un estado en el que no existe agarre de la unidad de agarre (6) , un hueco entre los dedos (17) que permite que pase un envase (2) , dicha unidad de agarre (6) se puede llevar hasta un estado de agarre, en el cual cada par de dedos (14) está dispuesto para realizar un movimiento de apriete con el fin de sujetar un envase (2) con una fuerza de apriete tal que los contenidos del envase (2) creen una distribución de presión opuesta interior que se extiende entre los dedos (15) de dicho par de dedos (14) para proporcionar un agarre bien definido.
2. Un dispositivo tal como se reivindica en la reivindicación 1, en el que la unidad de agarre (6) se puede mover entre una posición de agarre y una posición de colocación, en dicha posición de agarre la unidad de agarre está dispuesta para sujetar los envases (2) en la posición de embalaje (B) al llevar la unidad de agarre (6) a su estado de agarre, y en dicha posición de colocación la unidad de agarre (6) está dispuesta para colocar los envases (2) sujetos en la unidad de distribución (3) .
3. Un dispositivo tal como se reivindica en la reivindicación 1 o 2, en el que la unidad de agarre (6) se puede mover a lo largo de un eje de movimiento (A3) , que es perpendicular a dicho eje longitudinal (A1) , pudiéndose mover la unidad de agarre (6) entre la posición de agarre y la posición de colocación al moverse a lo largo de dicho eje de movimiento (A3) .
4. Un dispositivo tal como se reivindica en cualquier de las reivindicaciones 1-3, en el que la unidad de agarre (6) puede pivotar en torno a un eje de pivotamiento (A2) que es paralelo a dicho eje longitudinal (A1) .
5. Un dispositivo tal como se reivindica en la reivindicación 4, en el que la unidad de agarre (6) se puede mover a lo largo de un eje de movimiento (A3) que es perpendicular a dicho eje de pivotamiento (A2) y que coincide con un plano definido por dicho eje longitudinal (A1) y dicho eje de pivotamiento (A2) , pudiéndose mover la unidad de agarre (6) entre la posición de agarre y la posición de colocación al pivotar en torno al eje de pivotamiento (A2) y moverse a lo largo del eje de movimiento (A3) .
6. Un dispositivo tal como se reivindica en cualquiera de las reivindicaciones anteriores, en el que la unidad de agarre (6) está dispuesta para sujetar los envases (2) en grupos (G1; G2) de al menos dos envases (2) .
7. Un dispositivo tal como se reivindica en cualquiera de las reivindicaciones anteriores, en el que la unidad de agarre (6) comprende una pieza de apoyo (13) para soportar todos los pares de dedos (14) .
8. Un dispositivo tal como se reivindica en la reivindicación 7, en el que la pieza de apoyo (13) soporta al menos dos pares de dedos (14) , pudiéndose mover los pares de dedos (14) de forma relativa entre sí entre un estado de empuje conjunto y un estado separado.
9. Un dispositivo tal como se reivindica en la reivindicación 7 u 8, en el que la unidad de agarre (6) puede pivotar en torno a un eje de pivotamiento (A2) , que es paralelo a dicho eje longitudinal (A1) , y se puede mover a lo largo de un eje de movimiento (A3) , que es perpendicular a dicho eje de pivotamiento (A2) , y coincide con un plano definido por dicho eje longitudinal (A1) y dicho eje de pivotamiento (A2) , comprendiendo además un motor para el pivotamiento
(9) que se puede mover paralelamente a dicho eje de movimiento (A3) , donde dicho motor para el pivotamiento (9) soporta de manera pivotante la unidad de agarre (6) , con el fin de que pivote en torno a dicho eje de pivotamiento (A2) .
10. Un dispositivo tal como se reivindica en la reivindicación 9, en el que el motor para el pivotamiento (9) soporta la unidad de agarre (6) mediante un brazo (10) que se extiende perpendicularmente al eje de pivotamiento (A2) y que en un primer extremo (11) está conectado al motor para el pivotamiento (9) y que en un segundo extremo (12) está conectado a dicha pieza de apoyo (13) .
11. Un dispositivo tal como se reivindica en la reivindicación 10, en el que la pieza de apoyo (13) está conectada de manera pivotante al segundo extremo (12) de dicho brazo (10) .
12. Un dispositivo tal como se reivindica en cualquiera de las reivindicaciones anteriores, que comprende además un elemento de manipulación que está dispuesto para desplazar lateralmente de manera alternativa la unidad de distribución (3) en direcciones opuestas mutuamente antes de cada colocación de los envases (2) en la unidad de distribución (3) .
13. Un dispositivo tal como se reivindica en cualquiera de las reivindicaciones anteriores, donde el dispositivo forma un módulo que se puede conectar a una máquina de envasado para llenar los envases (2) de un tipo plegable.
14. Un dispositivo tal como se reivindica en cualquiera de las reivindicaciones 1-12, donde el dispositivo es una parte integral de una máquina de envasado para llenar envases (2) de un tipo plegable.
15. Un método para colocar envases (2) llenos y cerrados herméticamente de un tipo plegable en una unidad de distribución (3) , donde dichos envases (2) se mueven hasta una posición de embalaje (B) suspendidos y dispuestos a lo largo de un eje longitudinal horizontal (A1) que se extiende en la dirección general de alimentación de los envases (2) hasta la posición de embalaje (B) , que comprende
sujetar mediante un movimiento de apriete, desde uno de un primer y segundo lado (18; 19) del envase, los envases (2) en la posición de embalaje (B) uno por uno, cada envase (2) se sujeta entre los dedos (15) de un par de dedos (14) correspondiente con tal fuerza de apriete que los contenidos del envase (2) crean una distribución de presión opuesta interior que se extiende entre dichos dedos para proporcionar un agarre bien definido.
16. Un método tal como se reivindica en la reivindicación 15, que además comprende pivotar los envases (2) sujetos en torno al eje de pivotamiento (A2) de modo que el otro del primer y segundo lado (19; 18) del envase esté orientado hacia abajo, siendo paralelo dicho eje de pivotamiento (A2) a dicho eje longitudinal (A1) y situado en un plano vertical que comprende dicho eje longitudinal (A1) , mover los envases (2) sujetos en una dirección vertical hacia abajo y colocar el envase (2) sujeto en la unidad de distribución (3) depositándolos en esta, y posteriormente repetir el proceso hasta que la unidad de distribución (3) está llena de envases (2) .
17. Un método tal como se reivindica en la reivindicación 15 o 16, en el que los envases (2) en la posición de embalaje (B) se sujetan simplemente desde el primer lado del envase (18) .
18. Un método tal como se reivindica en la reivindicación 17, en el que el paso de colocar los envases (2) sujetos en la unidad de distribución (3) está precedido por el paso de pivotar la unidad de distribución (3) 180º.
19. Un método tal como se reivindica en la reivindicación 15 o 16, en el que los envases (2) en la posición de embalaje (B) se sujetan de manera alternada desde el primer lado del envase (18) y desde el segundo lado del envase (19) .
20. Un método tal como se reivindica en la reivindicación 19, en el que el paso de colocar los envases (2) sujetos en la unidad de distribución (2) está precedido por el paso de desplazar lateralmente los envases (2) sujetos con relación a la unidad de distribución (3) .
Patentes similares o relacionadas:
 Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Dispositivo y procedimiento para la transmisión e inserción de grupos de salchichas en un envase, del 30 de Octubre de 2019, de VEMAG MASCHINENBAU GMBH: Dispositivo para la transmisión de al menos una salchicha o porciones de alimentos, en particular un grupo de salchichas , a un envase , donde están previstos […]
Método y disposición para colocar paquetes de porciones, del 21 de Agosto de 2019, de Swedish Match North Europe AB: Un método para colocar paquetes de porciones (11a, 11b, 11c, ...) de un producto para uso oral en un recipiente por medio de una unidad de compartimentos (5, […]
Sistema robótico de recogida de bolsitas y procedimiento para el montaje y la recogida de bolsitas no llenas dotadas de boquilla, del 17 de Julio de 2019, de Scholle IPN IP B.V: Un sistema robótico de recogida de bolsitas para la recogida de bolsitas no llenas dotadas de boquilla para ser transportadas hasta un […]
Un conjunto de empaquetado, del 2 de Octubre de 2018, de Adaptapack Pty Limited: Conjunto de empaquetado que tiene: un recinto para recibir láminas de cartón ; un primer brazo que tiene medios para […]
ROBOT PARALELO E INSTALACIÓN PARA PALETIZACIÓN DE SACOS, del 24 de Agosto de 2017, de LYTZHOFT, Lone: Robot paralelo e instalación que lo incluye para manipular objetos de cierto volumen y peso como sacos y similares. El robot con cuatro grados […]
Dispositivo de procesamiento de alimentos de varios tipos y procedimiento, del 28 de Diciembre de 2016, de WEBER MASCHINENBAU GMBH BREIDENBACH: Dispositivo de procesamiento de alimentos, que presenta: al menos dos dispositivos de corte de alimentos , que están diseñados para generar, respectivamente, […]
 Llenado automatizado de alta velocidad de envases de productos farmacéuticos sólidos mediante un sistema transportador, del 13 de Abril de 2016, de MTS MEDICATION TECHNOLOGIES, INC: Un método para llenar una serie de receptáculos de envase de producto con fármacos sólidos que comprende:
proporcionar un sistema que comprende […]
Llenado automatizado de alta velocidad de envases de productos farmacéuticos sólidos mediante un sistema transportador, del 13 de Abril de 2016, de MTS MEDICATION TECHNOLOGIES, INC: Un método para llenar una serie de receptáculos de envase de producto con fármacos sólidos que comprende:
proporcionar un sistema que comprende […]