Arpón de anclaje particularmente para aeronave y sistema de anclaje que consta de dicho arpón.
Arpón de anclaje específico para aeronaves, capaz de cooperar con una rejilla de anclaje (2) de una plataforma,
que consta de medios en forma de gato (3) que incluyen medios cilíndricos (4) dentro de los que se desplazan medios en forma de pistón (5) provistos de un vástago (6) que sobresale de los medios cilíndricos y en cuyo extremo libre va una cabeza de arpón (7) que se amarra a la rejilla (2), y que está dotada de dedos de retención (8, 13, 14) que pueden pasar de una posición retraída a una posición activa por medios de control (9), caracterizado porque los medios cilíndricos (4) del gato incluyen por lo menos dos tramos de cilindro (10, 11) telescópico uno dentro del otro, que pueden moverse entre una posición en la que una porción se retrae dentro de la otra y una posición activa en la que una parte sale fuera de la otra.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2010/050030.
Solicitante: DCNS.
Nacionalidad solicitante: Francia.
Dirección: 40-42, rue du Docteur Finlay 75015 Paris FRANCIA.
Inventor/es: AFFRE DE SAINT ROME,RONAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64F1/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64F INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU USO EN CONEXIÓN CON AERONAVES; DISEÑO, FABRICACIÓN, ENSAMBLAJE, LIMPIEZA, MANTENIMIENTO O REPARACIÓN DE AERONAVES, NO PREVISTOS EN OTRO LUGAR; MANIPULACIÓN, TRANSPORTE, ENSAYO O INSPECCIÓN DE COMPONENTES DE AERONAVES, NO PREVISTOS EN OTRO LUGAR. › B64F 1/00 Instalaciones en tierra o instalaciones en cubierta de portaaviones (adaptadas especialmente para aeronaves cautivas B64F 3/00). › Piquetes o anclajes al suelo; Calzos de ruedas.
- F16B21/16 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16B DISPOSITIVOS PARA UNIR O BLOQUEAR LOS ELEMENTOS CONSTRUCTIVOS O LAS PARTES DE LAS MAQUINAS, p. ej. CLAVOS, CLAVIJAS, TUERCAS, TORNILLOS, BULONES, ANILLOS QUE FORMAN RESORTE, ABRAZADERAS, BRIDAS, GRAPAS, CUÑAS; UNIONES O ARTICULACIONES (acoplamientos para la transmisión de mecanismos de rotación F16D). › F16B 21/00 Medios sin roscado para prevenir el movimiento axial relativo de pasadores, espigas, ejes o similares y el órgano que ellos abarcan (espigas ribeteadas o deformables F16B 19/04; para muñones del pistón F16J 1/18 ); Medios de fijación de pasador y casquillo que se pueden soltar sin roscado. › con gargantas o acanaladuras practicadas en el eje o en el pasador.
PDF original: ES-2547555_T3.pdf
Fragmento de la descripción:
Arpón de anclaje particularmente para aeronave y sistema de anclaje que consta de dicho arpón [0001] La presente invención se refiere a un arpón de anclaje destinado, especialmente, para aeronaves, que es capaz de cooperar con una rejilla de anclaje de una plataforma y un sistema de anclaje que incluye dicho arpón.
Dichos arpones y sistemas de anclaje ya se conocen de forma general en la técnica anterior.
Así, por ejemplo, el documento FR-A-2 701 689 describe un arpón pensado para montarse en una aeronave de rotor, tal como un helicóptero, por ejemplo, que se pueda extraer hacia una plataforma de aterrizaje de un buque de modo que la cabeza de arpón se fije sobre la rejilla y forme así un punto de anclaje para la aeronave, lo que facilita la operación de aterrizaje. Otro ejemplo conocido es el de WO 91/04910, que se considera la técnica anterior más semejante y cuyas características se describen en el preámbulo de la reivindicación 1.
El arpón de anclaje descrito en este documento consta de medios en forma de cilindro en los que se desplazan medios en forma de pistón provistos de un vástago que se extiende más allá de los medios en forma de cilindro y cuyo extremo libre incluye una cabeza de arpón de amarre a la rejilla. Esta cabeza de arpón está provista de dedos de retención en la rejilla que se pueden mover radialmente entre una posición retraída y una posición activa por medios de control.
Dichos arpones ya se han puesto en práctica con éxito en muchos buques para realizar el anclaje, por ejemplo, de aeronaves de tipo helicóptero.
Desde hace algún tiempo, también hemos visto un gran número de tentativas para el aterrizaje de aeronaves de rotor de tipo dron sobre plataformas, en particular, las militares. 35
La solicitante también ha desarrollado y probado con éxito un sistema de aterrizaje y despegue automáticos de un dron de rotor en ese tipo de buques. 30 [0008] La puesta en práctica de estos drones también requiere el uso de arpones y rejillas de anclaje.
Los estudios han demostrado que no es viable adaptar directamente a drones de rotor los arpones de anclaje de helicópteros ya conocidos. 35 [0010] De hecho, estos estudios han mostrado problemas de tamaño, potencia, mantenimiento, etc.
El objetivo de la invención es resolver estos problemas.
A tal fin, la invención tiene por objeto un arpón de anclaje específico para aeronaves, capaz de cooperar con una rejilla de anclaje de una plataforma, que consta de medios en forma de gato que incluyen medios cilíndricos dentro de los que se desplazan medios en forma de pistón provistos de un vástago que sobresale de los medios cilíndricos y en cuyo extremo libre va una cabeza de arpón que se amarra a la rejilla, y que está dotada de dedos de retención que pueden pasar de una posición retraída a una posición activa por medios de control, caracterizado 45 porque los medios cilíndricos del gato incluyen por lo menos dos tramos de cilindro telescópico uno dentro del otro, que pueden moverse entre una posición en la que un tramo se retrae dentro del otro y una posición activa en la que un tramo sale fuera del otro.
De acuerdo con otras características de la invención, consideradas de forma aislada o combinadas:
-los medios en forma de gato están conectados a una fuente de fluido a presión a través de medios de control y dicha fuente de fluido a presión cuenta con un cartucho consumible de gas, -el gas es CO2, -los medios de control cuentan con medios que forman una electroválvula dirigida a la apertura y el cierre para el 55 suministro de los medios en forma de gato, -los medios de control de los movimientos de los dedos constan de un pistón de control móvil por deslizamiento hacia el vástago del gato y que va asociado a un accionador biestable de los dedos, desplazable entre las posiciones retraída y activa de la salida de los dedos a través de la aplicación sucesiva de impulsos de presión sobre los medios en forma de gato,
- el accionador biestable es un seguro mecánico giratorio, -el accionador biestable dispone de una rueda con dientes biselados interpuesta entre el pistón de control y un vástago de accionamiento de los dedos, dispuestos en un manguito que va conectado al vástago del gato, el extremo del pistón opuesto a la rueda con dientes biselados tiene dientes a su vez, de manera que, cuando se aplican los impulsos de presión a los medios en forma de gato y se producen los movimientos del pistón de control, la rueda con dientes biselados gira en el manguito, los dientes de la rueda también están adaptados para que cooperen con muescas consecutivas de diferentes alturas del manguito, con el fin de definir posiciones estables, tanto activo como retraído, del vástago de accionamiento de los dedos, -tiene un resorte de solicitación del vástago de accionamiento de los dedos en la posición retraída, -el extremo correspondiente de los medios en forma de gato se une a la aeronave e inserta un resorte helicoidal de retorno y de presión entre dicho extremo del gato y la cabeza de arpón, -el resorte helicoidal está dispuesto alrededor de los medios en forma de gato, -incluye medios de gatillo que impiden el movimiento de los dedos hacia su posición activa mientras la cabeza de arpón no esté en la posición de tope de la rejilla de anclaje.
La invención se refiere también a un sistema de anclaje, en particular para un avión de tipo dron con rotor, que comprende un arpón de anclaje tal como se ha descrito anteriormente.
La invención se comprenderá mejor con la ayuda de la descripción que se ofrece a continuación, dada 20 únicamente a modo de ejemplo y con referencia a los dibujos adjuntos, en los cuales:
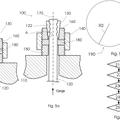
- las figuras 1 y 2 representan vistas en sección transversal de un arpón de anclaje de acuerdo con la invención en las posiciones de anclaje retraída y activa, respectivamente, en una rejilla de anclaje de una plataforma, -la figura 3 muestra una vista en perspectiva en despiece ordenado de una cabeza de arpón de amarre incluida en la composición de un arpón de acuerdo con la invención, -la figura 4 muestra un diagrama que ilustra el suministro de fluido a presión de un arpón de acuerdo con la invención, y -la figura 5 ilustra el funcionamiento de dicho arpón.
Estas figuras y, en particular, las figuras 1 y 2, ilustran un arpón de anclaje destinado especialmente al anclaje de una aeronave en una plataforma de un buque militar o similar.
La aeronave puede ser, por ejemplo, un dron de rotor.
Este arpón se designa mediante la referencia general 1 en estas figuras y está adaptado para cooperar con una rejilla de anclaje situada en la plataforma, rejilla que se designa en estas figuras mediante la referencia general 2.
De hecho, el arpón cuenta con medios en forma de gato designados por la referencia general 3, que 40 comprende medios cilíndricos designado por la referencia general 4, en los que se mueven medios en forma de pistón, designados por la referencia general 5.
Estos medios en forma de pistón están provistos de un vástago 6 que sobresale de los medios cilíndricos y cuyo extremo libre posee una cabeza de arpón que se amarra a la rejilla; esta cabeza de arpón está designada por 45 la referencia la general 7.
De hecho y como se describe en el documento de la técnica anterior antes mencionada, esta cabeza de arpón está provista de dedos de retención para la rejilla, móviles radialmente entre una posición retraída y una posición activa por medios de control, como se describirá con más detalle a continuación.
En estas figuras, uno de los dedos se designa mediante la referencia general 8 y los medios de control de estos, mediante la 9.
La estructura de estos medios de control también se describirá con más detalle a la luz de la figura 3.
Si volvemos a las figuras 1 y 2, vemos que los dedos y los medios de control se muestran en posición retraída en la figura 1 y en posición activa en la figura 2; cuando se despliega el arpón, los medios de control se mueven en el vástago para provocar un movimiento radial de los dedos de retención entre la posición retraída, en la figura 1, en la cabeza de arpón, y la posición activa de retención, en la figura 2, sobresaliendo radialmente con
respecto a dicha cabeza para bloquearla en la rejilla.
Para resolver los diversos problemas de integración en un dron tal como se ha descrito anteriormente, en el arpón de anclaje de acuerdo con la invención, los medios cilíndricos del gato cuentan al menos con dos tramos de cilindro telescópico que se halla uno dentro del otro y que pueden moverse entre una posición retraída, en la cual un tramo se retrae... [Seguir leyendo]
Reivindicaciones:
1. Arpón de anclaje específico para aeronaves, capaz de cooperar con una rejilla de anclaje (2) de una plataforma, que consta de medios en forma de gato (3) que incluyen medios cilíndricos (4) dentro de los que se 5 desplazan medios en forma de pistón (5) provistos de un vástago (6) que sobresale de los medios cilíndricos y en cuyo extremo libre va una cabeza de arpón (7) que se amarra a la rejilla (2) , y que está dotada de dedos de retención (8, 13, 14) que pueden pasar de una posición retraída a una posición activa por medios de control (9) , caracterizado porque los medios cilíndricos (4) del gato incluyen por lo menos dos tramos de cilindro (10, 11) telescópico uno dentro del otro, que pueden moverse entre una posición en la que una porción se retrae dentro de la otra y una posición activa en la que una parte sale fuera de la otra.
2. Arpón de anclaje de acuerdo con la reivindicación 1, caracterizado porque los medios en forma de gato están conectados a una fuente de fluido a presión (30) a través de medios de control (31) y dicha fuente de fluido a presión cuenta con un cartucho consumible de gas (30) .
3. Arpón de anclaje de acuerdo con la reivindicación 2, caracterizado porque el gas es CO2
4. Arpón de anclaje de acuerdo con la reivindicación 2 o 3, caracterizado porque los medios de control
incluyen medios que forman una electroválvula (31) dirigida a la apertura y el cierre para el suministro de los medios 20 en forma de gato.
5. Arpón de anclaje de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado porque los medios de control (9) de los movimientos de los dedos constan de un pistón de control (18) móvil por deslizamiento hacia el vástago del gato y que va asociado a un accionador biestable (19) de los dedos, desplazable entre las posiciones retraída y activa de la salida de los dedos a través de la aplicación sucesiva de impulsos de presión sobre los medios en forma de gato.
6. Arpón de anclaje de acuerdo con la reivindicación 5, caracterizado porque el accionador biestable es un seguro mecánico giratorio (19) 30
7. Arpón de anclaje de acuerdo con la reivindicación 6, caracterizado porque el accionador biestable (19) dispone de una rueda con dientes biselados (20) interpuesta entre el pistón de control (18) y un vástago de accionamiento (21) de los dedos, dispuestos en un manguito (22) que va conectado al vástago del gato, el extremo del pistón (18) opuesto a la rueda con dientes biselados (20) tiene dientes (25) a su vez, de manera que, cuando se aplican los impulsos de presión en los medios en forma de gato y se producen los movimientos del pistón de control, la rueda con dientes biselados (20) girar en el manguito (22) , los dientes de la rueda (20) también están adaptados para que cooperen con muescas consecutivas de diferentes alturas (26, 27) del manguito (22) , con el fin de definir posiciones estables, tanto activo como retraído, del vástago de accionamiento (21) de los dedos.
8. Arpón de anclaje de acuerdo con la reivindicación 7, caracterizado porque comprende un resorte (24) de solicitación del vástago de accionamiento (21) de los dedos en la posición retraída.
9. Arpón de anclaje de acuerdo con una de las reivindicaciones anteriores cualquiera, caracterizado porque el extremo correspondiente de los medios en forma de gato se une a la aeronave y porque se interpone 45 un resorte helicoidal de retorno y de presión entre dicho extremo del gato y la cabeza de arpón (7) .
10. Arpón de anclaje de acuerdo con la reivindicación 9, caracterizado porque el resorte helicoidal (12) está dispuesto alrededor de los medios en forma de gato.
11. Arpón de anclaje de acuerdo con una de las reivindicaciones anteriores cualquiera, caracterizado porque comprende medios de gatillo (15) que impide el movimiento de los dedos (8, 13, 14) hacia su posición activa mientras la cabeza de arpón no se encuentre en la posición de tope en la rejilla de anclaje (2) .
12. Sistema de anclaje específico para aeronaves de tipo dron con rotor, caracterizado porque consta de 55 un arpón de anclaje de acuerdo con una de las reivindicaciones anteriores cualquiera. .
Patentes similares o relacionadas:
 Disposición de conexión y procedimiento de fijación de un perno, del 27 de Mayo de 2020, de GENERAL ELECTRIC COMPANY: Disposición de conexión , que comprende:
a) un perno que incluye una parte de fijación en un extremo del mismo, incluyendo […]
Disposición de conexión y procedimiento de fijación de un perno, del 27 de Mayo de 2020, de GENERAL ELECTRIC COMPANY: Disposición de conexión , que comprende:
a) un perno que incluye una parte de fijación en un extremo del mismo, incluyendo […]
Estructura de conexión y dispositivo de visualización LED que tiene la misma, del 30 de Octubre de 2019, de Shenzhen Leyard Opto-Electronic Co., Ltd: Una estructura de conexión, que comprende: una primera placa de prensado , comprendiendo la primera placa de prensado un cuerpo de placa y una lámina de bloqueo […]
Conexión de liberación rápida, del 1 de Mayo de 2019, de SAMEC S.R.L: Conexión de liberación rápida que comprende por lo menos un componente hembra y por lo menos un componente macho adaptado para fijarse y no […]
Sistema de acoplamiento, del 6 de Febrero de 2019, de LUDWIG EHRHARDT GMBH: Sistema de acoplamiento para una máquina, en particular para una prensa, en particular para el acoplamiento mecánico de un mecanismo de posicionamiento a un carril de dispositivo […]
Perno para sujetar piezas contiguas, del 7 de Diciembre de 2018, de SIEGMUND, BERND: Perno para sujetar piezas contiguas, que presentan aberturas, que comprende un cuerpo de perno , que puede introducirse desde un lado de las piezas contiguas en […]
Pasador de bolas con palanca, del 31 de Enero de 2018, de Lisi Aerospace: Fijación de desenclavamiento rápido que comprende un cuerpo tubular de eje de revolución (A) con una porción que incluye al menos una abertura radial […]
Sistema rápido de sujeción y/o conexión, del 2 de Noviembre de 2016, de BRUN GIANCARLO: Sistema rápido de conexión y/o sujeción adecuado para conectar y desconectar mutuamente un primer y un segundo elementos , comprendiendo dicho sistema […]
Perfeccionamientos relacionados con sistemas de soporte de tubos, del 29 de Junio de 2016, de JCCO 330 Limited: Un aparato para suspender un objeto desde un punto de anclaje posicionado, en uso, por encima de él, que comprende: una varilla alargada que […]