Sistema de control de posicionamiento, de limitación de velocidad y de movimientos incontrolados de cabina, o contrapeso, de un ascensor.
Sistema de control de posicionamiento, de limitación de velocidad y de movimientos incontrolados de cabina,
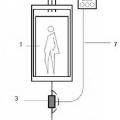
o contrapeso, de un ascensor, constituido por un equipo electrónico, instalado en la cabina del ascensor (11), que incluye un acelerómetro (13), cuya señal es evaluada en tiempo real por una unidad con control (15), que calcula de forma precisa la magnitud de las aceleraciones positivas o negativas del eje de desplazamiento vertical del ascensor en ambas direcciones y por tanto la posición alcanzada, a partir de las posiciones de referencia suministradas por unos sensores pre-finales (5); para que un microcontrolador (16) active una señal de salida cuando la velocidad máxima de la cabina del ascensor se sobrepase, actuando sobre el disparador del paracaídas (10) para que inmovilice la cabina (1).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300135.
Solicitante: S.A. SISTEL.
Nacionalidad solicitante: España.
Inventor/es: BATET TORRAS,JORDI, BATET SANCLIMENT,DAVID, BATET SANCLIMENT,Jordi, BATET SANCLIMENT,Gemma.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66B1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › Sistemas de control de ascensores en general (dispositivos de seguridad B66B 5/00; control del funcionamiento de la puerta o barrera B66B 13/00).
Fragmento de la descripción:
Sistema de control de posicionamiento, de limitación de velocidad y de movimientos incontrolados de cabina, o contrapeso, de un ascensor.
Objeto de la invención
La invención se encuadra dentro del sector técnico de los aparatos de elevación, en particular dentro de los ascensores destinados al transporte de personas. Los ascensores para pasajeros son medios de transporte personal en dirección vertical o indinada, que viajan en un soporte rígido y que tiene un portador cerrado. Como resultado de los diversos componentes de seguridad que obligatoriamente se han de instalar en ellos, los ascensores de pasajeros se encuentran entre los medios más fiables y seguros de transporte. En concreto, la presente invención pretende aportar una solución a tres requerimientos relacionados todos ellos con la seguridad de los ascensores; a saber:
a) Suplir y actuar como el limitador de velocidad existente en todos los ascensores.
b) Funcionar como corrector de movimiento no intencionado de cabina, y
c) Posicionador de la cabina, o dispositivo que determina y actualiza la posición de la cabina en todo momento^ dentro de la instalación del ascensor.
El sistema está constituido por un circuito electrónico que integra todos los componentes necesarios para su funcionamiento en un equipo ajeno al ascensor y que, conectado con éste, actúa sobre el paracaídas, o sobre los relés de marcha, cambios de velocidad, y paro en ascenso y en descenso, instalados en cualquier ascensor, cuando se detecta y determina alguna de estas incidencias por medio de un acelerómetro, en conjunción con una serie de detectores de posición o paso de la cabina.
Estado de la técnica
Actualmente, cada uno de los requerimientos a los que la presente invención proporciona solución tiene al menos una solución específica basada en técnicas convencionales, de distintos fabricantes; pero no se conoce ningún sistema o dispositivo que proporcione por sí solo una solución a todos estos requerimientos.
Los limitadores de velocidad están basados en el principio de una polea acanalada para el cable, que gira a velocidad proporcional a la velocidad de la cabina, provista de un mecanismo centrífugo para expansión de un resorte, de forma que al alcanzar el umbral de velocidad de disparo, la polea queda bloqueada y con ella el cable que la mueve. El bloqueo del cable provoca el disparo de las cuñas del paracaídas que frena la cabina. Los documentos de OTIS: US5052523, US4556155 y US5065845 describen dispositivos de estas características.
También son conocidos dispositivos para controlar movimiento no intencionado de cabina. Las recientes regulaciones relacionadas con la seguridad requieren que las instalaciones de elevación también deben de estar protegidas contra el movimiento accidental de la cabina del ascensor cuando las puertas de la cabina se abren. Esta normativa obliga a que se instale una protección contra el movimiento no intencionado de la cabina (UCMP) en ascensores nuevos y establece los requisitos generales de rendimiento para la detección del movimiento no deseado de cabinas (UCM) y dispositivos de reacción, sin dar reglas específicas de diseño, por lo que existen varias soluciones constructivas actualmente en el mercado de los ascensores.
Un sistema UCMP comprende funcionalmente tres sistemas interrelacionados: detección, evaluación y reacción. La UCMP de detección reconoce la ocurrencia de movimiento cuando el ascensor está parado con las puertas de la cabina abiertas. La UCMP de detección se realiza principalmente por medio de sensores mecánicos o eléctricos. Los sensores mecánicos constan de barras, bisagras, muelles, etc. y son accionados por el movimiento relativo entre el sensor y, por ejemplo, las piezas móviles. La detección eléctrica consiste principalmente en el seguimiento de la posición de la cabina, de la posición de las puertas de la propia cabina o de la
escalera al pozo, así como la velocidad de la cabina. La evaluación del UCMP 'decide' si el movimiento de la cabina detectado es intencional o no. La evaluación implica el análisis del movimiento no intencionado detectado, y el accionamiento del dispositivo de reacción. La evaluación puede hacerse mecánica o eléctricamente y 5 en algunos casos puede ser indistinguible de la detección. En muchas versiones de la UCMP la evaluación electrónica es parte del conjunto de control de elevación o circuito de seguridad. Los dispositivos para la reacción de la UCMP detienen el ascensor dentro de ciertos límites, una vez la UCM se ha evaluado. Desde el punto de vista del coste y del mantenimiento la mayoría de los fabricantes prefieren 10 utilizar los dispositivos de detención que ya están instalados en los ascensores.
Al contrario que en otros dispositivos de seguridad obligatorios, la UCMP es más bien el acrónimo colectivo de un grupo de diversas soluciones técnicas constructivas que tienen la función de un dispositivo específico o aparato. Dado que 15 el mercado del transporte de pasajeros en ascensor está dominado por la tracción eléctrica y no hidráulica, la mayoría de las soluciones UCMP están diseñadas para ascensores de tracción eléctrica. Sin embargo, muchas soluciones se pueden utilizar tanto en tracción eléctrica como en elevadores hidráulicos, ya que estos dos tipos de ascensores tienen similitudes en algunos aspectos de diseño. Aunque la 20 detección UCMP y los dispositivos de reacción son generalmente dispositivos convencionales, también resulta haber algo de innovación observable, por ejemplo, el uso de la RFID y los sistemas inteligentes de control. El documento de MITSUBISHI US2011/0272216 describe un dispositivo UCMP.
También existen multitud de sistemas empleados para la medida de la posición de la cabina dentro del hueco del ascensor:
Sensores magnéticos colocados en la cabina, activados por imanes colocados en la guía, en cada posición de piso.
- Sensores fotoeléctricos colocados en la cabina, activados por pantallas 30 reflectantes colocadas en la guía, en cada posición de piso.
- Cinta perforada en paralelo con las guías, con codificación de la posición relativa del nivel de piso, leída por sensores en la cabina.
Codificador absoluto rotativo multivuelta de impulsos, fijado en la cabina, con muelle real de recuperación de la posición del tambor, con cable solidario a la parte más alta del hueco o del foso.
Detector de posición a base de la medida de la vibración de un hilo de acero colocado desde lo alto del hueco hasta el foso, sensado por un detector con paso anular (Schmersal).
- Codificador incremental de impulsos colocado en la polea del motor de tracción, integrando la distancia de recorrido del cable de sustentación.
- Dispositivos RFID codificados con la información de cada planta, colocados a nivel de la misma y leídos por medio de otro dispositivo RFID solidario a la cabina.
- Telemetría láser
- Medidor de distancias de ultrasonidos.
Descripción de la invención
Cada uno de los sistemas descritos es capaz de suministrar la información necesaria para gestionar los relés de marcha, cambios de velocidad y paro en ascenso y en descenso, pero ninguno está basado en la técnica utilizada como instrumentación primaria en aviación, el dead reckoning o evaluación de posición por integración continua de las aceleraciones; mientras que el sistema de la invención está basado en la determinación de velocidad y posición de la cabina del ascensor por la evaluación matemática de las aceleraciones medidas en acelerómetros fijados al chasis de la cabina.
Como ya se ha indicado, el sistema de la invención permite controlar el posicionamiento de la cabina del ascensor, también funciona como limitador de velocidad y detecta movimientos incontrolados de cabina o del contrapeso de un ascensor. El sistema actúa sobre el paracaídas cuando: a) se alcanza la velocidad de disparo prefijada; b) se detecta un movimiento no intencionado de la cabina; determinando la posición de la misma, a partir de una posición de referencia, a efectos de controlar la velocidad del accionamiento para realizar la parada a nivel de la planta deseada.
Este sistema está constituido por un equipo electrónico, instalado en la cabina y
comprende los siguientes circuitos o bloques funcionales:
a) Un acelerómetro que constituye la base fundamental del principio de funcionamiento del sistema, el cual emite una señal que se evalúa en tiempo real por un microprocesador o un dispositivo de lógica programable FPGA, el cual calcula de forma precisa la magnitud de las aceleraciones positivas o negativas del eje de desplazamiento vertical del ascensor en ambas direcciones:
b)...
Reivindicaciones:
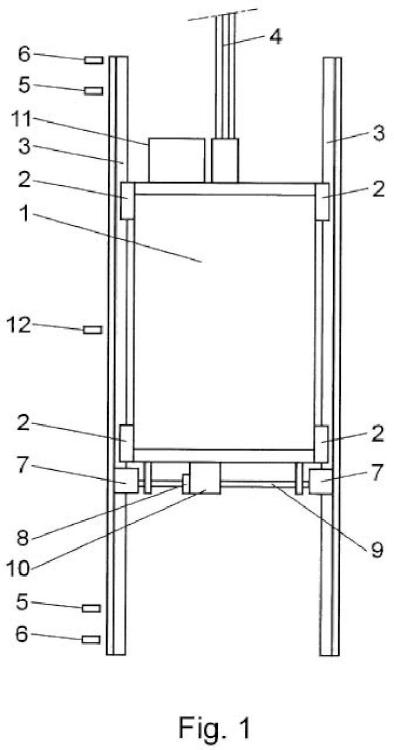
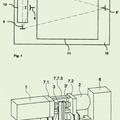
1.- Sistema de control de posicionamiento, de limitación de velocidad y de movimientos incontrolados de cabina, o contrapeso, de un ascensor; cuya cabina (1) presenta un recorrido cuyos límites están determinados por los sensores de posición pre-final (5) y los sensores de seguridad de final de recorrido (6) y dispone de un freno de seguridad o paracaídas (7) que se activa a través del disparador del timón (9) cuando se alcanza la velocidad límite prefijada para el ascensor, caracterizado por que está constituido por un equipo electrónico, instalado en la cabina del ascensor (11), que comprende:
a) un acelerómetro (13), cuya señal es evaluada en tiempo real por un microprocesador o dispositivo FPGA (15); que calcula de forma precisa la magnitud de las aceleraciones positivas o negativas del eje de desplazamiento vertical del ascensor en ambas direcciones;
b) una unidad de control, constituida por microprocesador o un dispositivo de lógica programable (15) que evalúa en tiempo real la velocidad y por tanto la posición alcanzada a partir de la liberación de las posiciones de referencia suministradas por los sensores pre-finales (5);
c) un microcontrolador (16) que ejerce funciones de interfaz con el control del ascensor, a través de un bus de campo (17) o de señales discretas (19) provenientes de salidas lógicas amplificadas; recibiendo señales que indican el alcance en subida o bajada, de la posición de parada de los pisos correspondientes, que han sido registradas en la memoria del microcontrolador (16) durante el proceso de puesta en marcha; así como las posiciones de cambio de velocidad del accionamiento, determinadas para todas las paradas a partir de los datos dinámicos del ascensor;
d) un amplificador de potencia que activa la salida (20) que actúa sobre el disparador del paracaídas (10) para que inmovilice la cabina (1) si la velocidad máxima de la cabina del ascensor es sobrepasada; y
e) una fuente de alimentación ininterrumpida (14) que suministra la energía para el mantenimiento del control, aún en ausencia de alimentación eléctrica externa.
2.- Sistema, según la reivindicación 1, caracterizado por que la unidad de control (16) recibe la señal de los detectores pre-finales (5) para determinar la posición de la cabina a partir de la posición de referencia que establecen, en conjunción con la medición de las aceleraciones positivas y negativas de la cabina;
así como de sensores de refresco de posición (12) con los que, cada vez que la
cabina pasa frente a los mismos, permiten establecer la posición real, que se
impone sobre la teórica estimada.
3.- Sistema, según la reivindicación 1 caracterizado por que este equipo se
instala en redundancia con la instalación de seguridad existente en el ascensor,
actuando sobre el paracaídas, ya sea éste de disparo electrónico o mecánico, cuando se alcanza la velocidad determinada, o cuando se detecta un movimiento no intencionado en la cabina.
Patentes similares o relacionadas:
Puesta en servicio automática de controlador para convertidores electrónicos de potencia activos trifásicos, del 1 de Julio de 2020, de OTIS ELEVATOR COMPANY: Un sistema para modular un nivel de corriente de salida de un convertidor de potencia bidireccional conectado a una red para garantizar que se proporcione […]
PLATAFORMA PARA TRABAJO EN HUECOS DE ASCENSOR, del 29 de Julio de 2019, de LERA PRADA, Javier: 1. Plataforma para trabajo en huecos de ascensor caracterizada porque comprende: -unas patas extensibles provistas en su parte inferior […]
Método y sistema de control de acceso y uso de los ascensores comunitarios, del 15 de Marzo de 2017, de GUINART CAMPS, Tomas: Un método de control de acceso y uso de los ascensores comunitarios en edificios, caracterizado por comprender las operaciones de: - Asignar a cada inmueble del […]
Disposición de máquina motriz de una instalación de ascensor, del 13 de Julio de 2016, de INVENTIO AG: Instalación de ascensor con una cabina , que está guiada por una primera guía de cabina y una segunda guía de cabina (5'), y un contrapeso , que está guiado por […]
Aparato elevador, del 1 de Febrero de 2016, de ORONA, S. COOP.: Aparato elevador que comprende una unidad de control que comprende una unidad principal de control de accionamiento alojada en un primer contenedor […]
 Instalación de ascensor y procedimiento para disponer una máquina motriz de una instalación de ascensor, del 23 de Diciembre de 2015, de INVENTIO AG: Instalación de ascensor
con cabina y contrapeso en una caja ,
con una máquina motriz (1, 2, 3, 3', 4, 40) montada sobre […]
Instalación de ascensor y procedimiento para disponer una máquina motriz de una instalación de ascensor, del 23 de Diciembre de 2015, de INVENTIO AG: Instalación de ascensor
con cabina y contrapeso en una caja ,
con una máquina motriz (1, 2, 3, 3', 4, 40) montada sobre […]
 SISTEMA DE CÁLCULO DE CARGA PARA UNA INSTALACIÓN DE ASCENSOR, del 13 de Octubre de 2015, de DINACELL ELECTRONICA, S.L.: Sistema de cálculo de carga para una instalación de ascensor.
La presente invención se refiere a un sistema de cálculo de carga para una instalación de ascensor conformado […]
SISTEMA DE CÁLCULO DE CARGA PARA UNA INSTALACIÓN DE ASCENSOR, del 13 de Octubre de 2015, de DINACELL ELECTRONICA, S.L.: Sistema de cálculo de carga para una instalación de ascensor.
La presente invención se refiere a un sistema de cálculo de carga para una instalación de ascensor conformado […]
Ascensor con engranaje de accionamiento de pequeño tamaño, del 31 de Diciembre de 2014, de KONE CORPORATION: Ascensor, preferiblemente ascensor sin sala de máquinas, en el que el grosor de los cables de izado es inferior a 8 mm y el diámetro de la polea de tracción es menor de 320 […]