Sensor de frente de onda secuencial.
Un sensor (200, 400, 500, 600, 900) de frente de onda secuencial que comprende:
un dispositivo de barrido de frente de onda;
una única abertura (218, 418, 518a, 518b, 618a, 618b, 918);
un único elemento (220, 420, 520a, 520b, 620a, 620b, 920) de enfoque; y
un único dispositivo (222, 422, 522a, 522b, 622a, 622b, 922) de detección de la posición, con lo que el dispositivo de barrido de frente de onda está adaptado para desplazar secuencialmente un frente de onda incidente mediante un primer desplazamiento en una primera dimensión y un segundo desplazamiento en una segunda dimensión, dirigiendo de este modo secuencialmente partes del frente de onda incidente hacia la abertura;
la única abertura está situada para interceptar y configurada para seleccionar secuencialmente las partes del frente de onda incidente desplazadas por el dispositivo de barrido secuencial;
el único elemento de enfoque está configurado para enfocar las partes del frente de onda incidente desplazado seleccionadas por la abertura en un plano focal;
el único dispositivo de detección de la posición está ubicado sustancialmente en el plano focal del elemento de enfoque y está configurado para medir los centroides obtenidos secuencialmente de las partes del frente de onda enfocadas y para indicar el desplazamiento bidimensional de los centroides desde puntos de referencia.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/049112.
Solicitante: CLARITY MEDICAL SYSTEMS.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5775 WEST LAS POSITAS BLVD., SUITE 200 PLEASANTON, CA 94588 ESTADOS UNIDOS DE AMERICA.
Inventor/es: ZHOU, YAN, WEI,SU, ZHAO,QING CHUN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B3/12 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 3/00 Aparatos para el examen óptico o clínico de los ojos; Instrumentos para examinar los ojos (examen ocular utilizando ondas ultrasónicas, sónicas o infrasónicas A61B 8/10). › para examinar el fondo de ojo, p. ej. oftalmoscopios (A61B 3/13 tiene prioridad).
- G01J3/06 FISICA. › G01 METROLOGIA; ENSAYOS. › G01J MEDIDA DE LA INTENSIDAD, DE LA VELOCIDAD, DEL ESPECTRO, DE LA POLARIZACION, DE LA FASE O DE CARACTERISTICAS DE IMPULSOS DE LA LUZ INFRARROJA, VISIBLE O ULTRAVIOLETA; COLORIMETRIA; PIROMETRIA DE RADIACIONES. › G01J 3/00 Espectrometría; Espectrofotometría; Monocromadores; Medida del color. › Sistemas de barrido.
- G01J9/00 G01J […] › Medida del desfase de rayos luminosos; Investigación del grado de coherencia; Medida óptica de la longitud de onda (espectrometría G01J 3/00).
PDF original: ES-2525685_T3.pdf
Fragmento de la descripción:
Sensor de frente de onda secuencial Antecedentes de la invención
Los sensores de frente de onda son dispositivos usados para medir la forma del frente de onda de un haz de luz (véase, por ejemplo, el documento US4141652). En la mayoría de los casos, un sensor de frente de onda mide la desviación de un frente de onda respecto a un frente de onda de referencia o un frente de onda ideal tal como un frente de onda plano. Un sensor de frente de onda puede usarse para medir aberraciones tanto de bajo orden como de alto orden de diversos sistemas de imaginologia óptica, tales como el ojo humano (véase por ejemplo, los documentos J. Liang, et al. (1994) "Objective measurement of the wave aberrations of the human eye with the use of a Hartmann-Shack wave-front sensor", J. Opt. Soc. Am. A 11, 1949-1957; T. Dave (24) "Wavefront aberrometry Part 1: Current theories and concepts" Optometry Today, 19 de noviembre de 24, páginas 41-45). Además, un sensor de frente de onda también puede usarse en óptica adaptativa, en la que el frente de onda distorsionado puede medirse y compensarse en tiempo real, usando, por ejemplo, un dispositivo de compensación de frente de onda óptico tal como un espejo deformable. Como resultado de dicha compensación, puede obtenerse una imagen nítida (véase por ejemplo, el documento US5777.719).
Actualmente, la mayoría de los sensores de frente de onda diseñados parta medir la aberración del ojo humano son de tipo Shack-Hartmann, en el que el frente de onda medido se divide simultáneamente en un formato paralelo en muchos subfrentes de onda. Los componentes esenciales de dicho sensor incluyen una fuente de luz o haz óptico de entrada, un conjunto de lentes diminutas (llamado conjunto de lentículos), y una cámara o algún otro medio para registrar el patrón y la ubicación (también llamado centroide) de las imágenes puntuales formadas por el conjunto de lentículos.
La figura 1 muestra un sensor de Shack-Hartmann de la técnica anterior ejemplar usado para la medición de aberraciones oculares. Un SLD (diodo superluminiscente) 12 se usa generalmente como la fuente de luz y la luz es suministrada a través de los componentes ópticos del ojo (que incluyen la córnea 14 y el cristalino 16) a un área relativamente pequeña en la retina 18. La luz dispersada desde la retina 18 se desplaza a través del sistema de imaginologia óptica del ojo (que incluye la córnea 14 y el cristalino 16) y emerge desde la pupila como un frente 11 de onda aberrado. Para suprimir la interferencia de luz reflejada por la córnea 14 y otras interfaces ópticas tales como las del cristalino 16 diferentes de la retina 18, el haz de luz relativamente estrecho de entrada está habitualmente polarizado por un primer polarizador 112 en una primera dirección. Dado que la luz dispersada por la retina está mucho más despolarizada, la luz dispersada por la retina se mide habitualmente en una segunda dirección de polarización ortogonal con un segundo analizador 114 ortogonal.
Puede usarse un sistema de óptica de retransmisión, por ejemplo, 116, que consta de un conjunto de lentes, para ampliar o reducir o simplemente transferir el frente de onda aberrado en un conjunto 118 de lentículos. Si el conjunto 118 de lentículos está en un plano conjugado de la pupila (un plano de imagen de la pupila), el frente de onda en el plano del lentículo será idéntico a o será una versión ampliada o reducida de la forma del frente de onda en la pupila del ojo. El conjunto 118 de lentículos forma entonces un conjunto de imágenes puntuales en la cámara 12 CCD. Si el ojo fuera un sistema óptico perfecto, el frente de onda en el plano del conjunto de lentículos sería perfectamente plano (tal como mediante la línea 122 recta de trazos) y un conjunto distribuido uniformemente de puntos de imagen sería registrado por la cámara 12 CCD ubicada en el plano focal del conjunto de lentículos.
Por otro lado, si el ojo no fuera perfecto, el frente de onda 124 en el conjunto de lentículos ya no será perfectamente plano y tendrá formas curvas irregulares. En consecuencia, las imágenes puntuales en la cámara 12 CCD se alejarán de la ubicación correspondiente al caso libre de aberraciones. A través del procesamiento de datos de la posición puntual de la imagen en la cámara 12 CCD, pueden determinarse aberraciones del ojo tanto de bajo orden como de alto orden (véase por ejemplo, el documento J. Liang, et al. (1994) "Objective measurement of the wave aberrations of the human eye with the use of a Hartmann-Shack wavefront sensor", J. Opt. Soc. Am. A 11, 1949- 1957).
Aunque un sensor de frente de onda puede medir la aberración tanto de bajo orden como de alto orden de un sistema de imaginologia óptica, para un sistema de imaginologia no estática tal como el ojo humano, se ha demostrado que solamente aberraciones de bajo orden correspondientes al error esferocilíndrico medidas a partir de la parte central del ojo son relativamente coherentes (véase por ejemplo, el documento Ginis HS, et al. "Variability of wavefront aberration measurements in small pupil sizes using a clinical Shack-Hartmann aberrometer" BMC Ophthalmol. 11 de febrero de 24; 4: 1.).
En la práctica, para la mayoría de las mediciones y la corrección de una aberración ocular, así como para la mayoría de sistemas ópticos de imaginologia del fondo del ojo, las aberraciones ópticas que es necesario medir y corregir son el error esferocilíndrico (también llamado desenfoque (defocus) y astigmatismo). Los expertos en la materia conocen bien que estas aberraciones pueden medirse usando un pequeño número de subfrentes de onda alrededor de un anillo anular del frente de onda de entrada. En tal caso, una gran parte de la lectura de los conjuntos de detectores CCD se desperdiciaría. Para ahorrar costes, una serie de (típicamente 8 o 16) detectores cuádruples
pueden disponerse alrededor de un anillo anular de un frente de onda aberrado para realizar la medición de solamente estos subfrentes de onda (véase por ejemplo, la patente de Estados Unidos N° 4.141.652).
Sin embargo, con esta disposición, sigue siendo necesario usar un número múltiple de detectores cuádruples que, aunque colectivamente son menos costosos que una cámara CCD de área grande, no obstante siguen siendo más costosos que un único detector cuádruple. Además, el alineamiento de una serie de detectores cuádruples también será mucho más difícil que el de un único detector cuádruple.
Breve descripción de los dibujos
La figura 1 muestra un sensor de Shack-Hartmann de la técnica anterior ejemplar usado para la medición de aberraciones oculares.
La figura 2 muestra un diagrama esquemático ejemplar de una realización del sensor de frente de onda secuencial.
La figura 3 muestra el desplazamiento radial y azimutal relativo de un frente de onda duplicado en 4 posiciones simétricas, que corresponde a 4 subfrentes de onda que se selecciona mediante una abertura alrededor de un anillo anular del frente de onda original.
La figura 4 muestra una realización alternativa del sensor de frente de onda secuencial, en la que el haz reflejado es dirigido lateralmente por el espejo de barrido en lugar de ser dirigido inicialmente hacia atrás.
La figura 5 muestra otra realización alternativa del sensor de frente de onda secuencial, en el que se usa un explorador por barrido de haz óptico transmisivo.
La figura 6 muestra otra realización alternativa más del sensor de frente de onda secuencial, en la que una serie de bloques ópticos paralelos de diferente orientación espacial deseada pueden conmutarse secuencialmente en la trayectoria del haz óptico para desplazar el haz transversalmente.
La figura 7 muestra un detector cuádruple con cuatro áreas fotosensibles A, B, C y D, y el punto de imagen en el detector cuádruple para un subfrente de onda incidente normal y un frente de onda incidente no normal.
La figura 8 muestra una serie de casos representativos de enfoque correcto, desenfoque y astigmatismo, el patrón de puntos de imagen asociado en el detector cuádruple detrás de una lente de enfoque de subfrente de onda, así como el movimiento secuencial de las posiciones del centroide correspondientes cuando se muestran en un monitor.
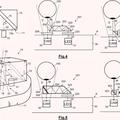
La figura 9 representa un sistema en el que un elemento o módulo óptico de ajuste de foco de alta velocidad es accionado en un modo de control en bucle cerrado por un motor de alta velocidad para mantener al sistema óptico enfocado.
La figura 1 representa un sistema en el que el estado de rotación del rastro del centroide puede usarse como una retroalimentación en un sistema de control en bucle cerrado para hacer girar dos lentes cilindricas para controlar y corregir astigmatismo.
Descripción... [Seguir leyendo]
Reivindicaciones:
1. Un sensor (2, 4, 5, 6, 9) de frente de onda secuencial que comprende:
un dispositivo de barrido de frente de onda;
una única abertura (218, 418, 518a, 518b, 618a, 618b, 918);
un único elemento (22, 42, 52a, 52b, 62a, 62b, 92) de enfoque; y
un único dispositivo (222, 422, 522a, 522b, 622a, 622b, 922) de detección de la posición, con lo que el dispositivo de barrido de frente de onda está adaptado para desplazar secuencialmente un frente de onda incidente mediante un primer desplazamiento en una primera dimensión y un segundo desplazamiento en una segunda dimensión, dirigiendo de este modo secuencialmente partes del frente de onda incidente hacia la abertura;
la única abertura está situada para interceptar y configurada para seleccionar secuencialmente las partes del frente de onda incidente desplazadas por el dispositivo de barrido secuencial;
el único elemento de enfoque está configurado para enfocar las partes del frente de onda incidente desplazado seleccionadas por la abertura en un plano focal;
el único dispositivo de detección de la posición está ubicado sustancialmente en el plano focal del elemento de enfoque y está configurado para medir los centroides obtenidos secuencialmente de las partes del frente de onda enfocadas y para indicar el desplazamiento bidimensional de los centroides desde puntos de referencia.
2. El sensor (2, 4, 5, 6, 9) de frente de onda secuencial de la reivindicación 1, donde el explorador por barrido de frente de onda comprende:
un motor eléctrico que tiene un árbol (214); y un espejo (212) inclinado ubicado sobre el árbol.
3. El sensor (2, 4, 5, 6, 9) de frente de onda secuencial de la reivindicación 2, en el que:
el motor es un motor paso a paso y el espejo (212) inclinado está montado en un ángulo fijo en el extremo del árbol (214), de modo que un número de subfrentes de onda alrededor de un anillo anular del frente de onda incidente son seleccionados cuando se hace girar al árbol (214).
4. El sensor (2, 4, 5, 6, 9) de frente de onda secuencial de la reivindicación 1, donde el explorador por barrido de frente de onda comprende:
un motor eléctrico que tiene un árbol; y
un espejo (412) de tambor multifacetado asimétrico montado sobre el árbol.
5. El sensor (2, 4, 5, 6, 9) de frente de onda secuencial de la reivindicación 1, donde el explorador por barrido de frente de onda comprende:
un explorador por barrido basado en MEMS.
6. El sensor (2, 4, 5, 6, 9) de frente de onda secuencial de la reivindicación 1, donde el explorador por barrido de frente de onda comprende:
un explorador (512a, 512b) por barrido de haz óptico transmisivo.
7. El sensor (2, 4, 5, 6, 9) de frente de onda secuencial de cualquier reivindicación anterior, en el que:
la abertura (218, 418, 518a, 518b, 618a, 618b, 918) es una abertura variable para controlar el tamaño de las partes del frente de onda incidente seleccionado.
8. El sensor (2, 4, 5, 6, 9) de frente de onda secuencial de cualquier reivindicación anterior, en el que el dispositivo (222, 422, 522a, 522b, 622a, 622b, 922) de detección de la posición es un detector (72) cuádruple que tiene cuatro áreas fotosensibles.
9. El sensor (2, 4, 5, 6, 9) de frente de onda secuencial de acuerdo con la reivindicación 1, que comprende
un dispositivo de barrido de frente de onda adaptado para desplazar secuencialmente un frente de onda incidente de modo que es muestreado un anillo anular.
1. El sensor (2, 4, 5, 6, 9) de frente de onda secuencial de la reivindicación 1, donde el dispositivo de barrido comprende:
un elemento reflectante configurado para desplazar el frente de onda incidente en direcciones radial y azimutal de forma gradual.
11. El sensor (2, 4, 5, 6, 9) de frente de onda secuencial de la reivindicación 1, donde el dispositivo de
barrido comprende:
un elemento reflectante configurado para desplazar de forma continua el frente de onda Incidente en direcciones radial y azimutal.
12. Un procedimiento de detección de la aberración de un frente de onda incidente, comprendiendo dicho procedimiento:
desplazar secuencialmente un frente de onda incidente mediante un primer desplazamiento en una primera dimensión y un segundo desplazamiento en una segunda dimensión, dirigiendo de este modo secuencialmente partes del frente de onda incidente hacia una única abertura que intercepta y selecciona secuencialmente las partes de un frente de onda incidente desplazado con una única abertura (218, 418, 518a, 518b, 618a, 618b, 918):
enfocar con un único elemento de enfoque las partes del frente de onda incidente desplazado seleccionadas por la abertura (218, 418, 518a, 518b, 618a, 618b, 918) sobre un único dispositivo (222, 422, 522a, 522b, 622a, 622b, 922) de detección de la posición:
medir los centroides obtenidos secuencialmente de las partes del frente de onda enfocadas con el dispositivo de detección de la posición; y determinar la deflexión bidimensional de los centroides respecto a puntos de referencia en el dispositivo (222, 422, 522a, 522b, 622a, 622b, 922) de detección de la posición.
13. El procedimiento de la reivindicación 12, que comprende además:
analizar una pluralidad de deflexiones bidimensionales para caracterizar la aberración del frente de onda incidente.
14. El procedimiento de la reivindicación 12 o 13, donde el dispositivo (222, 422, 522a, 522b, 622a, 622b, 922) de detección de la posición es un detector (72) cuádruple que tiene un punto de referencia y dicha etapa de determinar la deflexión comprende además:
calcular coordenadas de deflexión bidimensional de la parte del frente de onda incidente enfocado sobre el detector cuádruple.
15. El procedimiento de la reivindicación 14, que comprende además:
visualizar las deflexiones, de modo que cada parte enfocada se visualice en base a sus coordenadas calculadas.
16. El procedimiento de la reivindicación 13, donde seleccionar comprende además:
seleccionar secuencialmente una parte de un frente de onda incidente desplazado dispuesto alrededor de un anillo anular del frente de onda incidente, y donde analizar comprende además:
determinar la dispersión de las deflexiones bidimensionales
17. El procedimiento de la reivindicación 13, donde seleccionar comprende además:
seleccionar secuencialmente una parte del frente de onda incidente desplazado dispuesto alrededor de un anillo anular del frente de onda Incidente; y donde analizar comprende además;
detectar un cambio de signo en la ubicación de una parte enfocada para indicar un cambio de la forma de onda de entrada entre una forma de onda convergente y una forma de onda divergente.
18. El procedimiento de cualquiera de las reivindicaciones 13 a 17, que comprende además: visualizar las deflexiones bidimensionales para formar un patrón en un dispositivo de visualización.
19. El procedimiento de la reivindicación 13 a 18, que comprende además:
visualizar deflexiones bidimensionales en un dispositivo de visualización en tiempo real.
2. El procedimiento de cualquiera de las reivindicaciones 12 a 19 inclusive, que comprende además: hacer pulsar o emitir ráfagas de una fuente de luz que genera el frente de onda.
21. El procedimiento de la reivindicación 12
donde la etapa de determinar la deflexión bidimensional de la parte del frente de onda incidente enfocado en el dispositivo (222, 422, 522a, 522b, 622a, 622b, 922) de detección de la posición respecto a un punto de referencia en el dispositivo (222, 422, 522a, 522b, 622a, 622b, 922) de detección de la posición comprende
medir la deflexión bidimensional de la parte enfocada del frente de onda incidente desplazado enfocado sobre el dispositivo (222, 422, 522a, 522b, 622a, 622b, 922) de detección de la posición desde un punto de referencia en el dispositivo de detección de la posición para determinar la aberración del frente de onda incidente; y el procedimiento comprende la etapa adicional de
formar un criterio de retroalimentación en base a la deflexión bidimensional de la parte enfocada del frente de onda Incidente desplazado para usar el criterio de retroalimentación para accionar un dispositivo de compensación de frente de onda para compensar la aberración del frente de onda incidente.
22. El procedimiento de la reivindicación 21, donde seleccionar comprende además:
seleccionar secuenclalmente un número de partes del frente de onda incidente desplazado alrededor de un anillo anular del frente de onda Incidente.
23. El procedimiento de la reivindicación 22, donde dicha etapa de formar un criterio de retroalimentación comprende además:
minimizar la dispersión de las deflexiones como criterio para autoenfocar el frente de onda.
24. El procedimiento de la reivindicación 22, donde dicha etapa de formar un criterio de retroalimentación comprende además:
detectar un cambio de signo de la deflexión de una parte enfocada como criterio para indicar cuándo está enfocado un sistema óptico en frente del frente de onda.
25. El procedimiento de la reivindicación 22, donde dicha etapa de formar un criterio de retroalimentación comprende además:
detectar la desviación de un patrón formado por deflexión respecto a un círculo como criterio de retroallmentaclón para corregir el astigmatismo del frente de onda.
26. El procedimiento de la reivindicación 22, donde dicha etapa de formar un criterio de retroalimentación comprende además:
detectar la rotación anormal de un patrón formado por deflexión como criterio de retroalimentación para corregir un frente de onda astigmático.
27. El procedimiento de la reivindicación 22, donde dicha etapa de formar un criterio de retroalimentación comprende
además:
detectar la elipticidad del patrón formado por deflexión como criterio de retroalimentación para corregir el astigmatismo.
28. El procedimiento de cualquiera de las reivindicaciones 21 a 27, que comprende además:
controlar un dispositivo de compensación de frente de onda óptico con el criterio de retroalimentación para compensar la aberración del frente de onda incidente.
29. El procedimiento de cualquiera de las reivindicaciones 21 a 28, que comprende además: visualizar las deflexiones bidimensionales en un dispositivo de visualización en tiempo real.
3. Un sistema de compensación de frente de onda que comprende el sensor (2, 4, 5, 6, 9) de frente de onda secuencial de la reivindicación 1, y que comprende además un dispositivo de análisis de la aberración del frente de onda que genera una señal de retroalimentación en base a ubicaciones detectadas de las partes seleccionadas secuencialmente del frente de onda incidente desplazado; y
un dispositivo de compensación de frente de onda para compensar aberraciones en el frente de onda que utiliza la señal de retroalimentación en un sistema de control en bucle cerrado para activar la compensación.
31. El sistema de la reivindicación 3, con el dispositivo de compensación de frente de onda comprendiendo: una lente óptica accionada axialmente para enfocar el frente de onda.
32. El sistema de la reivindicación 3, con el dispositivo de compensación de frente de onda comprendiendo: un elemento de corrección del astigmatismo accionado de manera rotacional.
Patentes similares o relacionadas:
Oftalmoscopios, del 1 de Abril de 2020, de OPTOS PLC: Un oftalmoscopio para escanear un fondo de ojo de un ojo , que comprende un sistema de luz dispuesto para producir luz […]
SISTEMA PORTÁTIL PARA LA IDENTIFICACIÓN DE CASOS POTENCIALES DE EDEMA MACULAR DIABÉTICO MEDIANTE PROCESAMIENTO DE IMAGEN E INTELIGENCIA ARTIFICIAL, del 2 de Enero de 2020, de CENTRO DE RETINA MÉDICA Y QUIRÚRGICA, S.C: La diabetes es una enfermedad caracterizada por cifras elevadas de glucosa en sangre. Es importante mantener la diabetes controlada para evitar complicaciones a corto y […]
Unidad de posicionamiento y dispositivo de observación, del 14 de Agosto de 2019, de OCULUS OPTIKGERATE GMBH: Unidad de posicionamiento para el posicionamiento de una unidad óptica que comprende al menos un elemento óptico, en un recorrido […]
Despegue de la membrana epirretiniana guiado por tomografía de coherencia óptica, del 24 de Julio de 2019, de NOVARTIS AG: Un sistema de visualización de la membrana epirretiniana, que comprende: un sistema de TCO configurado para generar una imagen TCO de una región del […]
Mejoras en o relativas a la oftalmología, del 3 de Julio de 2019, de OPTOS PLC: Un aparato para iluminar una retina de un ojo , comprendiendo el aparato : un dispositivo de iluminación ; un sistema de lentes […]
 Accesorio óptico para dispositivo móvil, del 28 de Junio de 2019, de D-EYE S.r.l: Un accesorio óptico de un dispositivo móvil, que comprende:
unos medios de acoplamiento para la asociación separable con dicho dispositivo […]
Accesorio óptico para dispositivo móvil, del 28 de Junio de 2019, de D-EYE S.r.l: Un accesorio óptico de un dispositivo móvil, que comprende:
unos medios de acoplamiento para la asociación separable con dicho dispositivo […]
Sistema para visualizar zonas del cuerpo, del 5 de Junio de 2019, de Yetik, Hüseyin: Un sistema que comprende: varias unidades ópticas predeterminadas de enfoque; y un adaptador que comprende […]
Obtención de imágenes espectrales instantáneas del ojo, del 22 de Mayo de 2019, de Gil, Tamir: Un sistema de obtención de imágenes espectrales del ojo que comprende: un sistema óptico que obtiene imágenes del tejido del ojo en una […]