Reloj en tiempo real virtual en base a información de tiempo procedente de múltiples sistemas de comunicación.
Un procedimiento para proporcionar una estimación del tiempo absoluto en base a una información de tiempo procedente de una pluralidad de sistemas de comunicación,
que comprende:
obtener el tiempo absoluto a partir de un primer sistema de comunicación para un primer instante de tiempo;
recibir un primer mensaje de señalización a partir de un segundo sistema de comunicación en un segundo instante de tiempo;
determinar un desplazamiento de tiempo entre los instantes de tiempo primero y segundo;
recibir un segundo mensaje de señalización a partir del segundo sistema de comunicación en un tercer instante de tiempo;
determinar un tiempo transcurrido entre los instantes de tiempo segundo y tercero;
determinar una diferencia de tiempo entre el tercer instante de tiempo y un cuarto instante de tiempo; y
proporcionar una estimación del tiempo absoluto en el cuarto instante de tiempo en base al tiempo absoluto para el primer instante de tiempo, el desplazamiento de tiempo, el tiempo transcurrido y la diferencia de tiempo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2004/009306.
Solicitante: QUALCOMM INCORPORATED.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5775 MOREHOUSE DRIVE SAN DIEGO, CA 92121 ESTADOS UNIDOS DE AMERICA.
Inventor/es: FARMER,DOMINIC.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/03 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Elementos cooperantes; Interacción o comunicación entre diferentes elementos cooperantes o entre elementos cooperantes y receptores.
- H04B7/26 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04B TRANSMISION. › H04B 7/00 Sistemas de radiotransmisión, es decir, utilizando un campo de radiación (H04B 10/00, H04B 15/00 tienen prioridad). › en que al menos una es móvil.
- H04W56/00 H04 […] › H04W REDES DE COMUNICACION INALAMBRICAS (difusión H04H; sistemas de comunicación que utilizan enlaces inalámbricos para comunicación no selectiva, p. ej. extensiones inalámbricas H04M 1/72). › Disposiciones para sincronización.
PDF original: ES-2507668_T3.pdf
Fragmento de la descripción:
Reloj en tiempo real virtual en base a información de tiempo procedente de múltiples sistemas de comunicación
Antecedentes
Campo
La presente invención se refiere, en general, a la comunicación y, de manera más específica, a un procedimiento y aparato para implementar un reloj en tiempo real virtual en base a una información de tiempo procedente de múltiples sistemas de comunicación.
Antecedentes
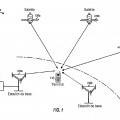
A menudo es deseable, y a veces necesario, que un terminal inalámbrico conozca la hora precisa. Una aplicación específica que requiere la hora precisa es la determinación de posición en base al bien conocido Sistema de Posicionamiento Global (GPS), que es una constelación de 24 satélites bien separados que orbitan la Tierra. Cada satélite de GPS transmite una señal codificada con una información que permite que los receptores de GPS en tierra midan el tiempo de llegada de la señal recibida en relación con un punto arbitrario en el tiempo. A continuación, esta medición del tiempo de llegada relativo puede convertirse en un pseudo-intervalo. La posición de un receptor de GPS puede estimarse de forma precisa en base a mediciones de pseudo-intervalo para un número suficiente de satélites y sus ubicaciones.
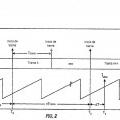
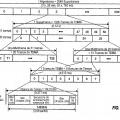
El tiempo de llegada de una señal a partir de un satélite de GPS puede determinarse mediante el procesamiento de la propia señal de GPS para obtener la información de tiempo necesaria. Para el GPS, la información de tiempo completa puede dividirse en tres componentes de tiempo diferentes: bit de semana (BOW), época (en bit) y trama de sub-código (la totalidad de los cuales se describen con detalle en lo sucesivo). Cada componente de tiempo cubre un intervalo de tiempo diferente y tiene una resolución de tiempo diferente. Cada componente de tiempo puede obtenerse de la señal de GPS en base a un procesamiento de señal diferente por el receptor. El procesamiento para obtener estas componentes de tiempo se realiza, por lo general, en orden secuencial, con una resolución de tiempo basta creciente, de tal modo que la temporización de la trama de sub-código (fino) se obtiene en primer lugar, la temporización de época (en bit) se obtiene a continuación, y la información de tiempo de BOW (basta) se obtiene en último lugar. Por lo tanto, el tiempo de procesamiento para obtener una componente de tiempo dada a partir de la señal de GPS es acumulativo (es decir, igual al tiempo de procesamiento para esa componente de tiempo más el tiempo de procesamiento para todas las componentes de tiempo más finas). Si el receptor de GPS tiene un conocimiento a priorí de cualquiera de estas componentes de tiempo, a continuación este puede omitir el procesamiento correspondiente para obtener la componente. Esto reduciría a continuación la cantidad de tiempo que se necesita para obtener la medición de pseudo-intervalo y, en última instancia, una fijación de posición para el terminal.
Un terminal puede obtener el tiempo de GPS como uno de los resultados de una fijación de posición. El tiempo de GPS puede verse como un tiempo verdadero o absoluto, e incluye la totalidad de las tres componentes de tiempo que se han descrito en lo que antecede. Este tiempo de GPS puede usarse para dar una indicación de tiempo a la temporización interna del terminal, de tal modo que este conoce el tiempo verdadero o absoluto en un instante de tiempo específico. Entre las fijaciones de posición, el terminal puede operarse en un modo de espera mediante el cual se apaga tanta circuitería como es posible para conservar la potencia de batería. Mientras que se encuentra en el modo de espera, el terminal mantiene, por lo general, un contador que se opera en base a un reloj interno. El contador es, en realidad, un temporizador que se usa para proporcionar una información de tiempo para el terminal mientras que este se encuentra en espera y que no recibe señales a partir de transmisor alguno.
Puede ordenarse al terminal que realice una nueva fijación de posición en un instante de tiempo arbitrario. El contador puede usarse a continuación como un reloj en tiempo real para estimar la cantidad de tiempo que ha transcurrido, según se mide por el reloj interno del terminal, desde el instante de tiempo para el cual se obtuvo el último tiempo de GPS. El tiempo absoluto en este instante de tiempo arbitrario puede estimarse mediante la adición de la estimación de tiempo transcurrido al último tiempo de GPS. La precisión de esta estimación de tiempo absoluto es dependiente de la precisión de la estimación de tiempo transcurrido. Si el tiempo transcurrido puede estimarse con un grado relativamente alto de precisión, a continuación la estimación de tiempo absoluto es razonablemente precisa. En este caso, puede que no sea necesario recuperar la temporización de BOW y de época en bit para la nueva fijación de posición. En consecuencia, la nueva fijación de posición puede obtenerse en una cantidad de tiempo mucho más corta, lo que es sumamente deseable.
Desafortunadamente, el reloj interno del terminal puede no ser lo bastante preciso. Por ejemplo, el reloj interno que se usa para implementar el reloj en tiempo real del terminal puede tener un error tan grande como 1 partes por millón (ppm). A continuación, la estimación de tiempo transcurrido incurriría en error en la misma cantidad de ppm, siendo la magnitud del error más grande para un tiempo transcurrido más prolongado. Por ejemplo, un error de 1 ppm en un tiempo transcurrido de 5 segundos es de 5 ms, y el mismo error de 1 ppm en un tiempo transcurrido de 5 segundos es de 5 ms. Un error grande en la estimación de tiempo transcurrido puede hacer necesario recuperar a continuación la temporización de época en bit y (posiblemente) de BOW para una nueva
fijación de posición, lo que es sumamente poco deseable.
Por lo tanto, en la técnica existe una necesidad de un procedimiento y aparato para implementar un reloj en tiempo real que tenga una precisión más alta y que pueda usarse para diversas aplicaciones tales como la determinación de posición.
Se llama la atención sobre el documento US 22/173322 A1, que describe un procedimiento y sistema para supervisar un reloj de red inalámbrica en comparación con una escala de tiempo absoluto que usa las propias estaciones móviles de usuario. La mayor ventaja tal como se describe en dicho documento es la capacidad de transferir el tiempo de GPS a una estación móvil en una red inalámbrica y, por lo tanto, de disminuir el tiempo necesario para que un receptor móvil realice cálculos de posición, con un soporte físico mínimo requerido por la red.
Sumario
De acuerdo con la presente invención se proporcionan, respectivamente, un procedimiento, y un aparato, tal como se expone en las reivindicaciones independientes. En las reivindicaciones dependientes se describen realizaciones de la invención.
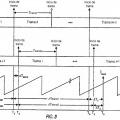
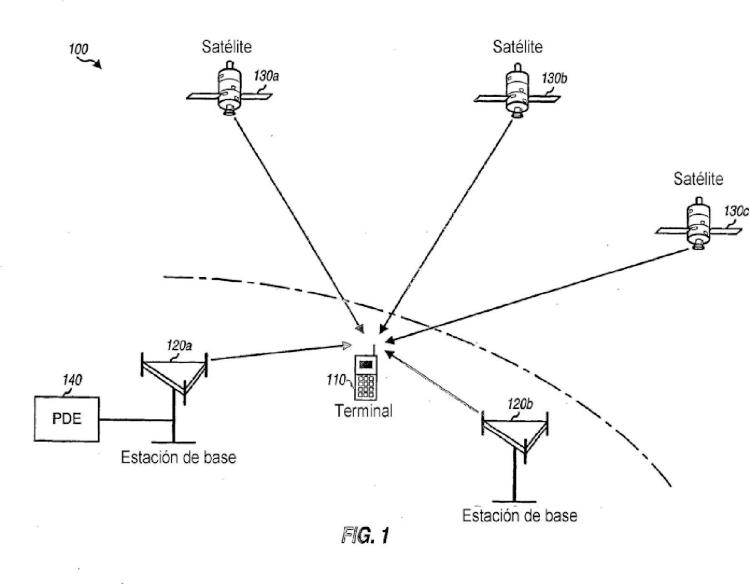
En el presente documento se proporciona un procedimiento y aparato para implementar un reloj en tiempo real virtual en un terminal en base a una información de tiempo procedente de múltiples sistemas de comunicación. Por lo menos un sistema (por ejemplo, GPS) proporciona una información de tiempo absoluto para el reloj en tiempo real virtual, y por lo menos otro sistema (por ejemplo, un sistema celular) proporciona una información de tiempo relativo. Puede darse una indicación de tiempo al reloj en tiempo real virtual con el tiempo absoluto a medida que este se vuelve disponible a partir del primer sistema. El tiempo relativo (que puede recibirse a partir de múltiples transmisores asincronos en el segundo sistema) puede correlacionarse con el diagrama de temporización del reloj en tiempo real virtual a medida que este se recibe a partir del segundo sistema. El tiempo absoluto en cualquier instante de tiempo arbitrario en el diagrama de temporización puede estimarse a continuación en base al tiempo absoluto a partir del primer sistema y el tiempo relativo a partir del segundo sistema. Los tiempos absolutos a partir del primer sistema para dos o más instantes de tiempo también pueden usarse para calibrar el tiempo relativo a partir del segundo sistema.
Una realización específica de un procedimiento que se describe en el presente documento puede proporcionar una estimación del tiempo absoluto en base a una información de tiempo procedente de un número de sistemas de comunicación. Inicialmente, el tiempo absoluto se obtiene de un primer sistema (por ejemplo, GPS) para un primer instante de tiempo. Un primer mensaje de señalización (por ejemplo, una ráfaga de sincronización) se recibe a partir de un primer transmisor en un segundo sistema (por ejemplo, un sistema de GSM o de W-CDMA) en un segundo instante de tiempo. A continuación, se determina un primer desplazamiento de tiempo... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para proporcionar una estimación del tiempo absoluto en base a una información de tiempo procedente de una pluralidad de sistemas de comunicación, que comprende:
obtener el tiempo absoluto a partir de un primer sistema de comunicación para un primer instante de tiempo; recibir un primer mensaje de señalización a partir de un segundo sistema de comunicación en un segundo instante de tiempo;
determinar un desplazamiento de tiempo entre los instantes de tiempo primero y segundo;
recibir un segundo mensaje de señalización a partir del segundo sistema de comunicación en un tercer instante
de tiempo;
determinar un tiempo transcurrido entre los instantes de tiempo segundo y tercero; determinar una diferencia de tiempo entre el tercer instante de tiempo y un cuarto instante de tiempo; y proporcionar una estimación del tiempo absoluto en el cuarto instante de tiempo en base al tiempo absoluto para el primer instante de tiempo, el desplazamiento de tiempo, el tiempo transcurrido y la diferencia de tiempo.
2. El procedimiento de la reivindicación 1, en el que cada uno del desplazamiento de tiempo y la diferencia de tiempo se determinan en base a un reloj local.
3. El procedimiento de la reivindicación 1, que comprende además:
obtener el tiempo absoluto a partir del primer sistema de comunicación para un quinto instante de tiempo; y determinar una diferencia en el tiempo absoluto entre los instantes de tiempo primero y quinto, y en el que el tiempo transcurrido se determina en base, por lo menos en parte, a la diferencia en el tiempo absoluto.
4. El procedimiento de la reivindicación 3, que comprende además:
determinar un periodo de trama para el segundo sistema de comunicación en base, por lo menos en parte, a la diferencia en el tiempo absoluto, y en el que el tiempo transcurrido se determina en base al periodo de trama.
5. El procedimiento de la reivindicación 1, en el que los mensajes de señalización primero y segundo se transmiten en unas ubicaciones conocidas en dos tramas.
6. El procedimiento de la reivindicación 1, en el que el primer sistema de comunicación es el Sistema de Posicionamiento Global.
7. El procedimiento de la reivindicación 1, en el que el segundo sistema de comunicación es un sistema de comunicación celular.
8. El procedimiento de la reivindicación 7, en el que la información de tiempo relativo comprende una temporización a nivel de trama.
9. El procedimiento de la reivindicación 7, en el que el sistema de comunicación celular se opera de forma
asincrona.
1. El procedimiento de la reivindicación 7, en el que el sistema de comunicación celular es un sistema de GSM.
11. El procedimiento de la reivindicación 1, en el que los mensajes de señalización primero y segundo son unas ráfagas de sincronización que se transmiten en un canal de sincronización en el sistema de GSM.
12. El procedimiento de la reivindicación 7, en el que el sistema de comunicación celular es un sistema de W- CDMA.
13. Un aparato para proporcionar una estimación del tiempo absoluto en base a una información de tiempo procedente de una pluralidad de sistemas de comunicación, que comprende:
unos medios para obtener el tiempo absoluto a partir de un primer sistema de comunicación para un primer instante de tiempo;
unos medios para recibir un primer mensaje de señalización a partir de un segundo sistema de comunicación en un segundo instante de tiempo;
unos medios para determinar un desplazamiento de tiempo entre los instantes de tiempo primero y segundo; unos medios para recibir un segundo mensaje de señalización a partir del segundo sistema de comunicación en un tercer instante de tiempo;
unos medios para determinar un tiempo transcurrido entre los instantes de tiempo segundo y tercero;
unos medios para determinar una diferencia de tiempo entre el tercer instante de tiempo y un cuarto instante de
tiempo; y
unos medios para proporcionar una estimación del tiempo absoluto en el cuarto instante de tiempo en base al tiempo absoluto para el primer instante de tiempo, el desplazamiento de tiempo, el tiempo transcurrido y la diferencia de tiempo.
14. Un producto de programa de ordenador que comprende:
un medio utilizable por ordenador para almacenar código para llevar a cabo los procedimientos de cualquiera de las reivindicaciones 1-12.
Patentes similares o relacionadas:
Método de comunicación y equipo de usuario en red mixta celular y de D2D, del 1 de Julio de 2020, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método de comunicación realizado por un equipo de usuario, UE, en una red mixta celular y de dispositivo a dispositivo, D2D, comprendiendo, el método: comunicarse […]
Configuración de subtrama, del 24 de Junio de 2020, de Nokia Solutions and Networks Oy: Un método, que comprende: transmitir, a al menos un dispositivo de comunicación, un mensaje que comprende una indicación de una primera […]
Método y aparato para soportar un grupo de agregación de portadoras en un sistema de comunicación inalámbrica, del 24 de Junio de 2020, de LG ELECTRONICS INC.: Un método para soportar un grupo de agregación de portadoras en un sistema de comunicación inalámbrica que soporta múltiples portadoras, realizado por un dispositivo […]
Procedimiento y aparato para activar operadores en un sistema de comunicaciones móviles, del 24 de Junio de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de comunicaciones de un terminal en un sistema de comunicaciones de agregación de operadores móviles, estando el procedimiento […]
Métodos para adaptar sincronización aérea a condiciones de radio, del 17 de Junio de 2020, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método, para una estación base que funciona en una red inalámbrica de comunicaciones, para facilitar la sincronización aérea por una estación base vecina, […]
Procedimiento de tratamiento de señales de descubrimiento, estación base y medio de almacenamiento informático, del 10 de Junio de 2020, de ZTE CORPORATION: Un procedimiento de tratamiento de señales de descubrimiento, DS que comprende: realizar una configuración, por medio de una estación base, en los recursos de DS […]
Método y aparato de control de potencia de transmisión en una red de área local inalámbrica, del 10 de Junio de 2020, de Microsoft Technology Licensing, LLC: Un método para controlar la potencia de transmisión de un primer dispositivo inalámbrico en una red de área local inalámbrica, que comprende: recibir, desde un segundo […]
Dispositivo de transmisión de radio, y procedimiento de transmisión de radio, del 27 de Mayo de 2020, de OPTIS WIRELESS TECHNOLOGY, LLC: Procedimiento de transmisión para utilizarse por un aparato de transmisión para transmitir datos e información de control en un sistema de portadora única, comprendiendo […]