Proyectiles de giro estabilizado maniobrable y método.
Un proyectil de giro estabilizado (10) que comprende:
un cuerpo externo (12);
una masa interna (14) en una cavidad (18) del cuerpo, que se caracteriza por que la masa interna está acoplada mecánicamente al cuerpo de modo que la masa interna pueda inclinarse de forma selectiva hacia y en contra del eje longitudinal (30) del cuerpo y rota en relación con el eje en una dirección opuesta a la del giro del cuerpo; y
un accionador (22, 24) acoplado a la masa interna tanto para inclinar la masa interna hacia y en sentido contrario del eje como para rotar la masa interna alrededor del eje en relación con el cuerpo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2009/057410.
Solicitante: RAYTHEON COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 870 WINTER STREET WALTHAM, MA 02451 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MCCOOL,JAMES W.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F42B10/60 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F42 MUNICIONES; VOLADURA. › F42B CARGAS EXPLOSIVAS, p. ej. PARA VOLADURA; FUEGOS ARTIFICIALES; MUNICIONES (composiciones explosivas C06B; espoletas para municiones F42C; voladura F42D). › F42B 10/00 Medios para variar, p. ej. para mejorar, las propiedades aerodinámicas de los proyectiles; Disposiciones instaladas en los proyectiles para la estabilización, el pilotaje, el frenado de la caída, la reducción o el aumento del alcance (F42B 6/00 tiene prioridad; proyectiles subcalibrados provistos de calzos F42B 14/00). › Disposiciones para el pilotaje (F42B 19/01 tiene prioridad).
PDF original: ES-2486666_T3.pdf
Fragmento de la descripción:
Proyectiles de giro estabilizado maniobrable y método
CONTEXTO DE LA INVENCÃ?ON 5
Ã?MBITO DE LA INVENCÃ?ON
La invencíon procede del ámbito de los proyectiles de giro estabilizado.
DESCRIPCIÓN DE ARTÃ?CULOS RELACIONADOS
Con frecuencia, los sistemas de direccionamiento para proyectiles son caros y complejos, así como propensos a dañarse durante el lanzamiento o el vuelo. Se necesita, en general, una mejora del sistema de direccionamiento para proyectiles. 15
US4431150A expone un proyectil de giro estabilizado de acuerdo con el preámbulo de la reivindicación 1 y un método de control de la trayectoria de un proyectil de acuerdo con el preámbulo de la reivindicación 9. Muestra el cuerpo de un proyectil que tiene un giróscopo montado que incluye un rotor y un mecanismo para sujetar el rotor.
WO02/14781A1 presenta un sistema de orientación del proyectil que incluye un proyectil de giro estabilizado que tiene una distribución interna de la masa variable, controlada por accionadores.
US3588003A presenta un sistema de misil que tiene un mecanismo de control de giróscopo.
WO98/23914A2 presenta un sistema de control de la dirección para proyectiles balísticos.
RESUMEN DEL DE LA INVENCÃ?ON
En concreto, sería deseable producir sistemas de direccionamiento para proyectiles de giro estabilizado, 30 como municiones, que fueran poco costosos, sencillos y resistentes y que permitan su control sin desplegar aletas u otras piezas en la corriente de aire, y sin disparar cohetes u otros aparatos de propulsión. Se valorará que las superficies de control y los aparatos de propulsión son complicados de utilizar en proyectiles de giro estabilizado.
De acuerdo con un aspecto de la invencíonen relación con la reivindicación 1, un proyectil de giro estabilizado 35 usa propiedades inerciales para su direccionamiento. El direccionamiento inercial implica la inclinación de una masa interna que esté en una cavidad o en un cuerpo o casco del proyectil en dirección de y apartado del eje longitudinal del cuerpo.
La masa interna gira en sentido contrario al casco en la dirección opuesta al giro del proyectil. [0010] De 40 acuerdo con otro aspecto del invento, el proyectil tiene electroimanes en la superficie interior del casco, mientras que la tensión se aplica de forma selectiva a los electroimanes para que inclinen o roten una masa en el interior de una cavidad del casco.
De acuerdo con otro aspecto de la invencíonen relación con la reivindicación 9, los métodos para controlar la 45 trayectoria de un proyectil incluyen los siguientes pasos: rotar en una primera dirección el cuerpo del proyectil sobre el eje longitudinal del proyectil; rotar en sentido contrario una masa interna del proyectil en relación con el eje longitudinal en una segunda dirección, opuesta a la primera dirección, en relación con el casco del proyectil e inclinando de manera selectiva la masa interna hacia y desde el eje longitudinal del cuerpo. La masa interna está en el interior de una cavidad del casco. 50
Para la ejecución de los fines anteriormente indicados y otros relacionados, el invento comprende las características señaladas en las reivindicaciones. La siguiente descripción y los dibujos anexos detallan más adelante la plasmación ilustrativa del invento. Esa plasmación, de todas formas, es indicativa de solo algunas de las varias formas en que se pueden emplear los principios del invento. Podrán obtenerse otros objetos, ventajas y 55 características nuevas de la invencíonde la siguiente descripción detallada del invento, cuando se consideren en conjunto con los diseños.
BREVE DESCRIPCIÓN DE LOS DISEÑOS
En los diseños adjuntos, que no son necesariamente a escala:
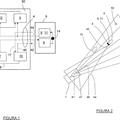
La Fig. 1 es una vista transversal de un proyectil de acuerdo con una plasmación del invento; la Fig. 2 es una vista transversal del proyectil de la Fig. 1, con el casco hacia arriba;
La Fig. 3 es una vista del extremo del proyectil de la Fig. 1;
La Fig. 4 es una vista del extremo que muestra las piezas de un accionador magnético de un proyectil de acuerdo con una concreción del invento;
La Fig. 5 es una ilustración que muestra el funcionamiento del accionador magnético de la Fig. 4; 5
La Fig. 6 es una ilustración que muestra las piezas de un buscador de un proyectil de acuerdo con una plasmación del invento;
La Fig. 7 es una ilustración conceptual que muestra la precesión de un proyectil de acuerdo con una plasmación 10 del invento;
La Fig. 8 muestra la compensación para la precesión ilustrada en la Fig. 7; y
La Fig. 9 es un diagrama de bloques de un sistema de control para un proyectil que usa el accionador magnético 15 de la Fig. 4.
DESCRIPCIÓN DETALLADA
La trayectoria de un proyectil de giro estabilizado se controla con la rotación inversa de una masa interna 20 sobre el eje longitudinal del proyectil. La masa interna puede ser un brazo dentro de una cavidad de un cuerpo externo al proyectil. La masa interna es basculante en relación con el casco exterior del eje del casco. La masa interna se configura para una rotación inversa en relación con el casco del eje del casco, que rota en relación al casco en una dirección opuesta de la dirección del giro del casco. La rotación inversa puede mantener la orientación del brazo en una orientación prácticamente igual en relación al entorno (no giratorio) exterior del proyectil. La 25 posición del brazo o de otro peso en el interior del proyectil puede por lo tanto usarse para direccionar el proyectil, proporcionándole un ángulo de ataque al casco del proyectil. Puede usarse un sistema magnético para invertir la rotación del brazo u otro peso. El proyectil puede tener un sistema de guía láser para ayudar al enfoque del proyectil y direccionar el proyectil en dirección del objetivo deseado.
La Fig. 1 muestra un proyectil de giro estabilizado 10 que puede direccionarse con el movimiento de un peso en el interior de un casco o cuerpo externo 12 del proyectil 10. El peso puede ser parte de un brazo o masa interna 14 situada en una cavidad 18 en el casco 12. El brazo 14 está acoplado a un par de accionadores, un accionador con eje en forma de Y 22 y un accionador con eje en forma de Z 24. Los accionadores 22 y 24 se usan para inclinar el brazo 14 en las respectivas direcciones Y- y Z- 26 y 28, en relación con el caco 12 y otras piezas del 35 proyectil 10. Tal y como se describe con mayor detalle más adelante, los accionadores 22 y 24 no solo inclinan el brazo 14, pivotando por lo menos uno de los extremos del brazo 14 hacia el exterior de un eje 30 del casco 12 y otras piezas del proyectil 10. Los accionadores 22 y 24 también rotan en sentido inverso el brazo 14 en relación al casco 12 en la dirección contraria a la del giro del proyectil 10. Esta rotación inversa es una rotación del casco 14 en relación con el eje del casco 30, en oposición a una rotación del casco 14 en relación con el eje del brazo 34. La 40 rotación inversa puede darse sustancialmente al mismo valor que el giro de las otras piezas del proyectil 10, igual que el brazo 14 puede mantenerse a la misma orientación relativa al entorno externo del proyectil 10, con el objetivo de orientar el proyectil 10 en una dirección determinada.
Los accionadores 22 y 24 pueden tener cualquiera de entre una amplia gama de formas, de las cuales solo 45 se indican algunas a continuación. En cierto sentido, la representación de los accionadores 22 y 24 puede considerarse esquemática, pues los accionadores 22 y 24 pueden ser meramente aspectos separados o característicos de un único aparato unificado. Además, se apreciará que el mecanismo representado por los accionadores 22 y 24, que se usan para inclinar y rotar en sentido inverso el brazo 14, pueden estar situados en cualquier lugar en el interior del casco 12. 50
El brazo 14 puede constituir aproximadamente la mitad del peso del proyectil 10, por ejemplo puede tener entre el 49% y el 51% del peso del proyectil 10 o más ampliamente entre el 45% y el 55% del peso del proyectil 10. El balance del peso del brazo 14 y del resto del proyectil 10 podrá simplificar el control de la trayectoria del proyectil 10. De todas formas, se apreciará que alternativamente el brazo 14 puede tener considerablemente menos que la 55 mitad del peso del proyectil 10, por ejemplo podrá ser de aproximadamente el 20% del peso del proyectil 10. El brazo 14 puede contener una batería 49 que se usa para dar energía a los accionadores 22 y 24, así como a otros sistemas del proyectil 10. De forma alternativa o adicional, el brazo 14 u otras masas internas puede incluir plomo u otros materiales pesados.
... [Seguir leyendo]
Reivindicaciones:
1. Un proyectil de giro estabilizado (10) que comprende:
un cuerpo externo (12) ;
una masa interna (14) en una cavidad (18) del cuerpo, que se caracteriza por que la masa interna está 5 acoplada mecánicamente al cuerpo de modo que la masa interna pueda inclinarse de forma selectiva hacia y en contra del eje longitudinal (30) del cuerpo y rota en relación con el eje en una dirección opuesta a la del giro del cuerpo; y un accionador (22, 24) acoplado a la masa interna tanto para inclinar la masa interna hacia y en sentido contrario del eje como para rotar la masa interna alrededor del eje en relación con el cuerpo. 10
2. El proyectil de la reivindicación 1, en el que la masa interna es un brazo cilíndrico acoplado a una punta del cuerpo.
3. El proyectil de la reivindicación 1 o de la reivindicación 2, en el que la masa interna contiene una pila. 15
4. El proyectil de cualquiera de las reivindicaciones de la 1 a la 3, en el que la masa interna constituye entre el 20% y el 55% del peso del proyectil.
5. El proyectil de cualquiera de las reivindicaciones de la 1 a la 4, en el que el accionador sea un accionador 20 magnético que usa un efecto magnético para posicionar la masa interna en relación con el cuerpo.
6. El proyectil de la reivindicación 5,
cuando el accionador magnético incluya parejas de electroimanes opuestos diametralmente unidos a una superficie interior del cuerpo; y 25
cuando se pueda aplicar de forma sucesiva tensión a las parejas de electroimanes para mover por lo menos la parte de la masa interna alejada del eje del cuerpo y para rotar la masa interna en relación con el eje del cuerpo en relación con el cuerpo.
7. El proyectil de cualquiera de las reivindicaciones entre la 1 y la 6, cuando incluyan sistemas de control electrónico 30 acoplados al accionador para controlar el movimiento de la masa interna por el accionador.
8. El proyectil de la reivindicación 7, cuando incluya un rastreador acoplado de forma operativa al sistema electrónico de control; y cuando el rastreador proporcione información a los sistemas electrónicos de control en relación con la ubicación de 35 un objetivo a respecto del proyectil.
9. Un método de control de la trayectoria de un proyectil (10) , que incluye:
la rotación en una primera dirección de un cuerpo (12) del proyectil en relación con un eje longitudinal 40 (30) del proyectil; que se caracteriza por la rotación inversa de una masa interna (14) del proyectil a respecto del eje longitudinal en una segunda dirección, opuesta a la primera, en relación con el casco del proyectil; inclinar de forma selectiva la masa interna hacia y en sentido contrario del eje longitudinal del cuerpo;
cuando la masa interna (14) esté en el interior de una cavidad (18) del cuerpo (12) . 45
10. El método de la reivindicación 9, en el que la rotación inversa incluye rotación inversa de la masa interna en relación con el cuerpo externo de forma que se mantenga la masa interna en sustancialmente la misma orientación en relación con un elemento ambiental externo al proyectil, para darle al proyectil en una dirección determinada.
11. El método de la reivindicación 10, que además implica el direccionamiento del proyectil moviendo la masa interna que se encuentra dentro de la cavidad, para colocar el proyectil en un ángulo de ataque no cero en relación con la trayectoria de vuelo del proyectil.
12. El método de la reivindicación 11, cuando el movimiento incluya la inclinación de la masa interna en relación con 55 el cuerpo, en el interior de la cavidad.
13. El método de la reivindicación 11 o de la reivindicación 12, cuando el direccionamiento incluya seleccionar una dirección del movimiento de la masa interna y una tasa de rotación inversa basada en la información recibida de un rastreador del proyectil. 60
14. El método de la reivindicación 11 o de la reivindicación 12, cuando la inclinación sea una función de una suma de vectores de una reacción de inclinación a la imagen de un objetivo recibida por el rastreador, y la respuesta de precesión producida por la respuesta de inclinación.
15. El método de cualquiera de las reivindicaciones de la 11 a la 14, cuando el movimiento incluya mover la masa 5 interna hacia o en sentido contrario de un eje longitudinal del cuerpo.
Patentes similares o relacionadas:
 Un sistema y procedimiento para rastrear y guiar múltiples objetos, del 25 de Diciembre de 2019, de SAAB AB: Un sistema de guiado para dar seguimiento y guiar al menos dos objetos , en el que dicho sistema de guiado comprende:
una estación […]
Un sistema y procedimiento para rastrear y guiar múltiples objetos, del 25 de Diciembre de 2019, de SAAB AB: Un sistema de guiado para dar seguimiento y guiar al menos dos objetos , en el que dicho sistema de guiado comprende:
una estación […]
Auto-sincronización para un guiado distribuido de proyectiles, del 10 de Mayo de 2017, de RAYTHEON COMPANY: Un método para el uso y la configuración de un proyectil, que comprende: proporcionar una primera parte de un proyectil con un primer sensor de orientación […]
SISTEMA DE ESTABILIZACION DE UN AVION SIN PILOTO Y SISTEMA DE PILOTAJE DE UN AVION SIN PILOTO QUE UTILIZA UN SISTEMA DE ESTABILIZACION DE ESTE TIPO., del 16 de Abril de 2005, de AEROSPATIALE MATRA MISSILES: Sistema de estabilización de un avión sin piloto, que comprende un captador óptico , dotado de cuatro ventanas transparentes y diametralmente opuestas […]
METODO Y DISPOSITIVO PARA LA UTILIZACION DE CABEZAS EXPLOSIVAS ENVIADAS DESDE UN VEHICULO DE LANZAMIENTO A OBJETIVOS DE COMBATE IDENTIFICADOS DURANTE LA TRAYECTORIA DE VUELO DEL VEHICULO LANZADOR., del 1 de Diciembre de 2001, de BOFORS AB: LA INVENCION SE REFIERE A UN METODO Y A UN DISPOSITIVO PARA COMBATIR OBJETIVOS IDENTIFICADOS (F) UTILIZANDO CABEZAS BALISTICAS SOBRE UN VEHICULO DE LANZAMIENTO QUE VUELA […]