Máquina de trabajo automotriz con dispositivo integrado de movimiento lateral y nivelación.
Una máquina de trabajo automotriz con dispositivo integrado de movimiento lateral y nivelación,
incluyendo:
- un chasis con una parte delantera (2) y una parte trasera (3) a la que se conectan un eje delantero (12), provisto de un par de ruedas (22), y un eje trasero (13), provisto de un par de ruedas (23), respectivamente;
- un brazo de maniobra (4) con un extremo relacionado conectado a la parte trasera (3), de manera que sea movible en un plano vertical de esta; siendo otro extremo del brazo de maniobra (4) libre y concebido para portar una herramienta,
- la parte delantera (2) y la parte trasera (3) se articulan entre sí con un acoplamiento (6) que permite movimientos relativos alrededor de al menos un eje de articulación; caracterizada porque: la parte delantera (2) mencionada también se conecta con la mencionada parte trasera (3) con un vínculo deformable de cuatro brazos, en el que dos elementos opuestos, formados conjuntamente por la parte delantera (2) y la parte trasera (3), están vinculados entre sí a través de dos actuadores (5), cada uno de los cuales se conecta en forma de barra con un extremo relacionado a la parte delantera (2) y, con el otro extremo, a la parte trasera (3); los mencionados actuadores están concebidos para operar mayormente en direcciones verticales; como mínimo un tercer actuador (7) está provisto, que se conecta en forma de barra con un extremo relacionado a la parte delantera (2) y, con el otro extremo, a la parte trasera (3) y que está concebido para operar de acuerdo con direcciones mayormente horizontales; dichos actuadores (5,7) son operables de manera independiente; medios destinados a medir cargas que pesen en al menos una de las dos ruedas (22) del mencionado eje delantero (12) y a impartir un comando de bloqueo, a través de una unidad de control, como respuesta a límites predeterminados que se alcancen, para bloquear el mencionado eje lateral (13) con respecto a la parte trasera relacionada (3).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2011/000261.
Solicitante: C.M.C. S.r.l. - Società Unipersonale.
Nacionalidad solicitante: Italia.
Dirección: Via A. Vespucci 2 41013 Castelfranco Emilia (Modena) ITALIA.
Inventor/es: BORGHI, GIANNI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66F17/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › Dispositivos de seguridad, p. ej. para limitar o indicar la fuerza de elevación.
- B66F9/065 B66F […] › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › sin mástiles (gatos móviles de tipo garaje montados sobre carretillas o rodillos B66F 5/00).
- B66F9/10 B66F 9/00 […] › desplazables en sentido horizontal con relación al carro.
PDF original: ES-2523278_T3.pdf
Fragmento de la descripción:
Máquina de trabajo automotriz con dispositivo integrado de movimiento lateral y nivelación DESCRIPCIÓN DE LA INVENCIÓN
[1] La invención encaja en el campo técnico que se refiere a las máquinas de trabajo automotrices.
[2] Entre ellas se consideran las máquinas que implican la construcción de un vehículo integrado, adecuadamente diseñado para portar una pieza de equipamiento, como un brazo elevador basculante, equipado con una herramienta, por ejemplo, provista de una horquilla, con la que se pueden elevar y transportar cargas en sitios de construcción y similares. En estas máquinas existen problemas particularmente importantes, que conciernen la posibilidad de bascular, o el movimiento lateral y la nivelación.
[3] Estas máquinas incluyen patas estabilizadores, dispuestas solo en su lado delantero, diseñadas para elevar del suelo las correspondientes ruedas cuando, con el vehículo parado, la máquina se prepara para utilizar el brazo elevador.
[4] En el lado trasero, no obstante, el apoyo en el suelo es proporcionado por las ruedas. Cuando la máquina está puesta en el lugar, tras operar las patas estabilizadores delanteras, al brazo elevador se le permite bascular en un plano vertical, para extender sus elementos telescópicos, pero no en un plano horizontal, es decir, moverse lateralmente hacia la posición correcta para realizar operaciones de carga y descarga.
[5] Esto resulta en un límite operativo mientras se maniobra la carga, lo que puede requerir una nueva ubicación o posicionamiento de la máquina, con el consiguiente desperdicio del tiempo requerido para lograr un cambio adecuado.
[6] Una situación nada infrecuente ocurre cuando el suelo sobre el que descansa la máquina de trabajo tiene pendiente respecto de la horizontal, o es irregular, de modo que las ruedas traseras y delanteras y, por consiguiente, las mencionadas patas estabilizadores cuando se ponen en operación, descansan sobre porciones de suelo con diferentes Inclinaciones.
[7] La disposición inclinada y/o desbalanceada de la máquina que esto implica, por supuesto, se vuelve más inestable al utilizar el brazo elevador, con riesgo potencial de accidentes. Se necesitan operaciones de maniobra adecuadas para lograr una nivelación aceptable en posición horizontal.
[8] Una máquina de acuerdo con el preámbulo de la reivindicación 1 se da a conocer en el documento EP 927698 A1.
[9] Por consiguiente, es un objeto de la presente invención proponer una máquina de trabajo automotriz con un dispositivo integrado de movimiento lateral y nivelación, que esté conformada a modo de permitir una corrección de la posición lateral de la carga, dentro de un rango predeterminado, en orden de optimizar las operaciones de colocación de esta sin una nueva ubicación de la máquina.
[1] Otro objeto de la invención se refiere al hecho de obtener una máquina de trabajo que se pueda adaptar a tierra en pendiente y/o irregular para encontrar, de manera autosuficiente, una disposición horizontal aceptable, sin dispositivos externos.
[11] Otro objeto importante de la presente invención es darle respuesta a una necesidad de seguridad, irresuelta en las aplicaciones conocidas, que es prevenir de manera automática el vuelco de la máquina, tanto lateral como trasero.
[12] Otro objeto más de la invención es proponer una máquina de trabajo que mantenga un tamaño compacto para asegurar alta maniobrabilidad en espacios reducidos, con costes de producción proporcionales al usuario al que esté dirigida.
[13] Dichos objetos y beneficios se logran con la invención, según resulta de las reivindicaciones.
[14] En particular, la invención tiene las características ventajosas distintivas de lograr los objetos tal como se establecen sin mecanismos adicionales, más que aquellos utilizados para la nivelación y el movimiento transversal.
[15] Las características de la invención se aclaran con la siguiente descripción de las materializaciones preferentes del dispositivo estabilizador en cuestión, de acuerdo con los contenidos de las reivindicaciones y con la ayuda de las figuras incluidas, en donde:
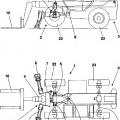
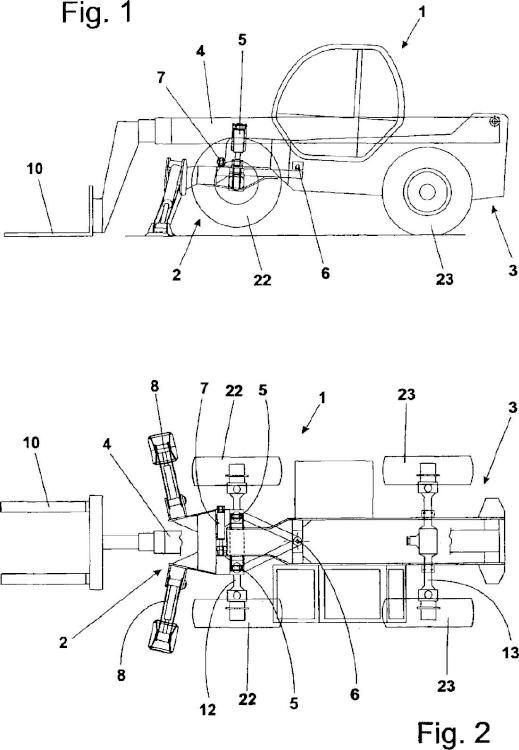
la figura 1 muestra una vista lateral esquemática de una máquina de trabajo en posición de trabajo de carga/descarga con los elementos estabilizadores frontales 8 descendidos; la figura 2 muestra una vista en planta de la figura 1;
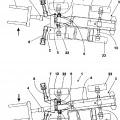
las figuras 3 y 4 muestran vistas en planta como las de la figura 1 en dos configuraciones de trabajo
diferentes, en las que se resaltan desplazamientos hacia la izquierda y la derecha, respectivamente;
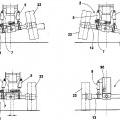
las figuras 5, 6 y 7 muestran vistas frontales esquemáticas de diferentes configuraciones operativas de la
máquina, omitiendo la representación de algunas partes de ello para enfatizar mejor las otras;
la figura 8 muestra una vista frontal esquemática del área del lado trasero de la máquina.
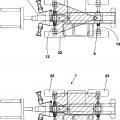
las figuras 9 y 1 muestran vistas en planta esquemáticas de la máquina, con la base de apoyo marcada en
dos configuraciones operativas diferentes.
[16] Con referencia a las figuras mencionadas, el numeral 1 indica, en general, una máquina de trabajo automotriz, que soporta un dispositivo integrado para movimiento lateral y nivelación. La máquina de trabajo 1 incluye un bastidor, en el que una parte delantera 2 y una parte trasera 3 se pueden identificar, a las que se adaptan un eje delantero 12 y un eje trasero 13, respectivamente.
[17] Un brazo de maniobra telescópico (o brazo elevador) 4 está vinculado (pivotado), con sus propios extremos, a la parte trasera 3, a fin de ser movible en un plano vertical de esta. El otro extremo del brazo de maniobra telescópico 4 es libre y está diseñado para portar una herramienta 1, en el caso que se ilustra una horquilla, que se puede acoplar con un sistema de acoplamiento adecuado.
[18] La parte delantera 2 y la parte trasera 3 están articuladas entre sí mediante un acoplamiento que permite movimientos recíprocos de las dos partes alrededor de al menos un eje de articulación.
[19] En este caso, el acoplamiento es un acoplamiento esférico 6.
[2] La parte delantera 2 está también conectada a la parte trasera 3 con un mecanismo de vinculación de cuatro brazos, en el que los dos miembros opuestos, formados conjuntamente en la parte delantera 2 y en la parte trasera 3, se vinculan entre sí mediante dos actuadores. Cada uno de esos dos actuadores está conectado en forma de barra con uno de sus extremos a la parte delantera 2 y, con el otro extremo, a la parte trasera 3.
[21] Los actuadores están concebidos para operar mayormente en direcciones verticales. En la configuración, en la que la parte delantera 2 está alineada con la parte trasera 3, los dos actuadores están dispuestos simétricamente con respecto a un plano medio longitudinal de la máquina de trabajo 1.
[22] Al menos un tercer actuador está provisto, con uno de sus extremos conectado en forma de barra a la parte delantera 2 y, con el otro extremo, a la parte trasera 3, y ubicado transversalmente al eje longitudinal de la parte delantera 2 de la máquina de trabajo 1, de modo de operar de acuerdo con sus direcciones mayormente horizontales. De manera preferente, este actuador se dispone en un plano perpendicular al eje longitudinal de la parte delantera 2 y es sustancialmente horizontal.
[23] Todos los actuadores mencionados, de manera preferente, se operan independientemente entre sí.
[24] Más específicamente, los dos actuadores del mencionado vínculo de cuatro brazos, cada uno de los cuales está conectado en forma de barra, con uno de sus extremos a la parte delantera 2 y, con el otro extremo, a la parte trasera 3, son dos actuadores lineales 5, así como el mencionado tercer actuador es un actuador lineal 7.
[25] En la materialización que se ilustra, los dos actuadores lineales 5 son cilindros hidráulicos y tienen sus extremos inferiores abisagrados a la parte delantera 2 y ubicados en el mismo plano vertical paralelo al eje geométrico del eje delantero 12; los correspondientes extremos superiores están abisagrados a la parte trasera 3 y se disponen en el mismo plano paralelo al eje geométrico del eje trasero 13.
[26] El eje delantero 12, que presenta ruedas 22, está conectado de manera rígida a la parte delantera 2, a la que se conectan al menos dos elementos estabilizadores exteriores 8, simétricamente con respecto a un plano medio perpendicular al eje geométrico del eje delantero 12. Estos están controlados independientemente, para asegurar apoyo estable en el suelo, cuando la máquina de trabajo se posiciona para operaciones de carga/descarga con la herramienta montada al extremo libre del brazo de maniobra telescópico 4.
... [Seguir leyendo]
Reivindicaciones:
1. Una máquina de trabajo automotriz con dispositivo integrado de movimiento lateral y nivelación, incluyendo:
- un chasis con una parte delantera (2) y una parte trasera (3) a la que se conectan un eje delantero (12), provisto de un par de ruedas (22), y un eje trasero (13), provisto de un par de ruedas (23), respectivamente;
- un brazo de maniobra (4) con un extremo relacionado conectado a la parte trasera (3), de manera que sea movible en un plano vertical de esta; siendo otro extremo del brazo de maniobra (4) libre y concebido para portar una herramienta,
- la parte delantera (2) y la parte trasera (3) se articulan entre sí con un acoplamiento (6) que permite movimientos relativos alrededor de al menos un eje de articulación; caracterizada porque: la parte delantera
(2) mencionada también se conecta con la mencionada parte trasera (3) con un vínculo deformable de cuatro brazos, en el que dos elementos opuestos, formados conjuntamente por la parte delantera (2) y la parte trasera (3), están vinculados entre sí a través de dos actuadores (5), cada uno de los cuales se conecta en forma de barra con un extremo relacionado a la parte delantera (2) y, con el otro extremo, a la parte trasera
(3) ; los mencionados actuadores están concebidos para operar mayormente en direcciones verticales; como mínimo un tercer actuador (7) está provisto, que se conecta en forma de barra con un extremo relacionado a la parte delantera (2) y, con el otro extremo, a la parte trasera (3) y que está concebido para operar de acuerdo con direcciones mayormente horizontales; dichos actuadores (5,7) son operables de manera independiente; medios destinados a medir cargas que pesen en al menos una de las dos ruedas (22) del mencionado eje delantero (12) y a impartir un comando de bloqueo, a través de una unidad de control, como respuesta a límites predeterminados que se alcancen, para bloquear el mencionado eje lateral (13) con respecto a la parte trasera relacionada (3).
2. Una máquina, según la reivindicación 1, caracterizada porque la mencionada parte delantera (2) y la mencionada parte trasera (3) se articulan entre sí mediante un acoplamiento esférico (6).
3. Una máquina, según la reivindicación 1 o 2, caracterizada porque los dos actuadores del vínculo de cuatro brazos, cada uno de los cuales se conecta en forma de barra con un extremo relacionado de la parte delantera (2) y, con el otro extremo, a la parte trasera (3), son dos actuadores lineales (5).
4. Una máquina, según la reivindicación 1 o 2, caracterizada porque dicho tercer actuador, que está conectado en forma de barra con un extremo relacionado a la parte delantera (2) y, con el otro extremo, a la parte trasera (3) y que está concebido para operar de acuerdo con direcciones mayormente horizontales, es un actuador lineal (7).
5. Una máquina, según la reivindicación 1, caracterizada porque el mencionado eje delantero (12) se conecta de manera rígida a la mencionada parte delantera (2) a la que también se conectan como mínimo dos elementos estabilizadores exteriores (8), simétricamente con respecto a un plano medio perpendicular al eje geométrico del eje delantero (12); los mencionados dos elementos estabilizadores exteriores (8) como mínimo se controlan de manera Independiente para asegurar el apoyo en el suelo.
6. Una máquina, según la reivindicación 1, caracterizada porque el mencionado eje trasero (13) se conecta con la parte trasera (3) por una suspensión; porque en dicho medio concebido para medir cargas soportadas directamente en al menos una de las dos ruedas (22) del mencionado eje delantero (12) e impartir un comando de bloqueo, a través de una unidad de control, para bloquear el mencionado eje trasero (13) con respecto a la parte trasera relacionada (3), se provee como mínimo un dispositivo estabilizador que opera, como respuesta a comandos de control, entre el mencionado eje trasero (13) y la mencionada parte trasera (3) para bloquear cualquier movimiento recíproco del mismo en cualquier posición predeterminada.
7. Una máquina, según la reivindicación 6, caracterizada porque el mencionado dispositivo estabilizador que opera, como respuesta a comandos de control, entre el mencionado eje trasero (13) y la mencionada parte trasera (3) para bloquear cualquier movimiento recíproco del mismo, incluye un actuador hidráulico lineal o cilindro hidráulico (9) abisagrado, con un extremo relacionado, en una posición en el eje trasero (13) y con el otro extremo en una posición de la parte trasera (3).
8. Una máquina, según la reivindicación 3, caracterizada porque los mencionados dos actuadores lineales (5) son cilindros hidráulicos y tienen sus correspondientes extremos, abisagrados a la parte delantera (2), dispuestos en un mismo plano vertical paralelo al eje geométrico del eje delantero (12), y sus correspondientes extremos, abisagrados a la parte trasera (3), dispuestos en un mismo plano paralelo al eje geométrico del eje trasero (13).
9. Una máquina, según la reivindicación 8, caracterizada porque los mencionados dispositivos concebidos para medir cargas que pesan en al menos una de las dos ruedas (22) del mencionado eje delantero (12) Incluyen transductores de presión asociados con los dos actuadores lineal (5) que son cilindros hidráulicos.
1. Una máquina, según la reivindicación 9, caracterizada porque los mencionados transductores de presión se asocian al mencionado actuador lineal (5) constituido por cilindros hidráulicos, de modo que midan las presiones
presentes dentro, lo que resulta directamente proporcional a las cargas que pesan en las respectivas ruedas (22) del mencionado eje delantero (12).
11. Una máquina, según la reivindicación 1, caracterizada porque los mencionados medios incluyen una unidad 5 de control concebida para impartir un comando de bloqueo, en respuesta a límites predeterminados que se
alcancen, para bloquear el mencionado eje trasero (13) con respecto a la parte trasera relacionada (3), y también concebidos para recibir señales de medición desde los mencionados transductores, y para compararlos con límites predeterminados y para impartir un comando de bloqueo, en respuesta a la obtención de dichos límites, para bloquear la suspensión del eje trasero (13) con respecto a la parte trasera (3) mediante un comando para operar el 1 mencionado actuador lineal (9) que es un cilindro hidráulico de doble acción.
12. Una máquina, según la reivindicación 11, caracterizada porque el mencionado actuador hidráulico lineal (7) es un cilindro hidráulico de doble acción.
Patentes similares o relacionadas:
Plataforma de trabajo con protección contra funcionamiento involuntario sostenido, del 27 de Mayo de 2020, de JLG INDUSTRIES,INC.: Una plataforma de trabajo combinada y un sistema para detectar obstáculos próximos, la plataforma de trabajo incluye un panel de […]
SISTEMA DE SEGURIDAD PARA EVITAR SOBRECARGA EN TORRES ELEVADORAS DE CARGAS, del 20 de Mayo de 2020, de EQUIPSON, S.A.: 1. Sistema de seguridad para evitar la sobrecarga en torres elevadoras de cargas, caracterizado porque comprende: - un sensor de carga , […]
Sistema de detección de obstáculos para una plataforma de trabajo aérea, del 19 de Febrero de 2020, de JLG INDUSTRIES,INC.: Un conjunto de plataforma que comprende: una plataforma de trabajo que incluye un piso de la plataforma y un riel de seguridad que se extiende […]
VEHÍCULO AISLADO MONTADO CON PLATAFORMA DE TRABAJO AÉREO Y MÉTODO DE LIMITACIÓN AUTOMÁTICA DE RADIO PARA LA PLATAFORMA DE TRABAJO AISLADA, del 16 de Enero de 2020, de XUZHOU HANDLER SPECIAL VEHICLE CO., LTD: Vehículo aislado montado con plataforma de trabajo aéreo y método de limitación automática de radio para la plataforma de trabajo aislada. Se proporciona […]
Sistema de elevación, del 20 de Noviembre de 2019, de Manitou Italia S.r.l: Un sistema de elevación para máquinas de trabajo, que comprende: una plataforma de carga capaz de soportar operadores y/o herramientas; un brazo […]
Componente telescópico de conexión y plataforma aérea de trabajo, del 23 de Octubre de 2019, de Zhejiang Dingli Machinery Co., LTD: Una plataforma aérea de trabajo, que comprende: un vehículo ; un componente telescópico de transmisión; una plataforma de operación; y un componente […]
Método y sistema para un dispositivo de elevación que tiene ruedas independientemente dirigibles, del 2 de Octubre de 2019, de Xtreme Manufacturing, LLC: Un sistema de vehículo elevador de tijera que comprende un carro que incluye una pluralidad de conjuntos de ruedas independientemente dirigibles […]
Sistema optoeléctrico de protección mejorada de la estación de control del operador, del 10 de Julio de 2019, de JLG INDUSTRIES,INC.: Un sistema para proteger a un operador en una plataforma de trabajo aéreo de un peligro de aplastamiento, la plataforma de trabajo […]