Vehículos articulados.
Un vehículo articulado (10) que comprende una sección trasera (12) y una sección delantera (40) montadaen la sección trasera (12) por medio de un pivote que se extiende verticalmente (42) caracterizado porquela sección delantera (40) tiene una o más ruedas delanteras (50) montadas para el movimiento depivotamiento en un plano horizontal con relación a la sección delantera,
porque una primera rueda dentada(90) está montada en un eje vertical, para el movimiento con la sección delantera (40), porque el eje de laprimera rueda dentada (90) está desplazado del eje del pivote (42) entre las secciones delantera y trasera(12, 40), por tener medios (80) para transmitir movimiento angular con una relación de 1:1 y en la mismadirección, desde la rueda o ruedas delanteras (50) a la rueda dentada (90) porque tiene una segunda ruedadentada (92) montada en la sección trasera (12) del vehículo coaxialmente con el eje del pivote (42) entrelas secciones delantera y trasera (12, 40), estando la segunda rueda dentada (92) conectadaaccionadamente al sensor giratorio (100), estando la primera y la segunda ruedas dentadas (90, 92)conectadas accionadamente por medio de una cadena (96), teniendo la primera y la segunda ruedasdentadas (90, 92) una relación de transmisión de 1:1.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2009/002743.
Solicitante: Translift Bendi Limited.
Nacionalidad solicitante: Reino Unido.
Dirección: Unit 22 Padgets Lane South Moons Moat Redditch Worcestershire B98 0RB REINO UNIDO.
Inventor/es: BROWN,FREDERICK LESLIE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66F9/075 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › Características o detalles de estructura.
- B66F9/10 B66F 9/00 […] › desplazables en sentido horizontal con relación al carro.
PDF original: ES-2425192_T3.pdf
Fragmento de la descripción:
Vehículos articulados La presente invención se refiere a vehículos articulados y en particular a un sistema para medir el ángulo de giro del vehículo articulado.
En vehículos no articulados, por ejemplo como los mostrados en el documento US4218170, en los que el vehículo es girado rotando las ruedas delanteras con relación al cuerpo del vehículo, el ángulo de giro es el ángulo al que las ruedas delanteras son giradas y puede ser medido sin problemas.
Normalmente, los vehículos articulados tienen una o más ruedas montadas en una sección delantera del vehículo, estando la rueda o ruedas delanteras montadas en un eje transversal fijo. Con tales vehículos por ejemplo como los descritos en los documentos WO2004/106216A1 y EP1223142A2, el vehículo es girado pivotando la sección delantera con relación a la sección trasera del vehículo. Con tales vehículos el ángulo de giro es igual al ángulo en el que la sección delantera es pivotada con relación a la sección trasera y de nuevo se puede medir sin problemas.
Sin embargo, con vehículos articulados, por ejemplo carretillas elevadoras articuladas, que tienen una o mas ruedas montadas en una sección delantera del vehículo, con medios independientes para pivotar la sección delantera con relación a una sección trasera en el plano horizontal y para pivotar las ruedas delanteras con relación a la sección delantera del vehículo en un plano horizontal, del tipo expuesto es el documento GB 2321049A, el ángulo de giro real conseguido mediante la rotación de las ruedas delanteras será modificado por el ángulo de articulación entre las secciones delantera y trasera del vehículo.
Cuando se conducen vehículos de este tipo, es necesario medir el ángulo de dirección real, esto es el ángulo de las ruedas delanteras con relación a la sección trasera del vehículo, para controlar las velocidades de las ruedas traseras motrices del vehículo y proporcionar control diferencial de las ruedas traseras cuando se gira. También es necesario dejar que el operador del vehículo sepa la dirección en la que las ruedas delanteras estás posicionadas, cuando se inicia la marcha del vehículo desde parado.
Hasta ahora, esto se ha conseguido por medio de sensores separados que miden el ángulo de articulación y el ángulo de las ruedas delanteras con relación a la sección delantera, y calculando, a partir de las dos medidas, el ángulo de giro real. Esto requiere la misma energía de procesamiento.
La presente invención proporciona medios para medir directamente el ángulo de giro de tales vehículos articulados, utilizando un único sensor.
De acuerdo con un aspecto de la presente invención, un vehículo articulado comprende una sección trasera y una sección delantera montada en la sección trasera por medio de un pivote que se extiende verticalmente, teniendo la sección delantera una o más ruedas delanteras montadas para el movimiento de pivotamiento en un plano horizontal con relación a la sección delantera, caracterizado porque una primera rueda dentada está montada en un eje vertical, para el movimiento con la sección delantera, estando el eje de la rueda dentada desplazado del eje del pivote entre las secciones delantera y trasera, medios para trasmitir el movimiento angular en una relación 1:1 y la misma dirección, desde la rueda o ruedas delanteras a la rueda dentada, una segunda rueda dentada montada en la sección trasera del vehículo coaxialmente con respecto al eje de pivotamiento entre las secciones delantera y trasera, estado la segunda rueda dentada conectada de manera accionadamente a un sensor de rotación, estando la primera y la segunda ruedas dentadas conectadas accionadamente por medio de una cadena, teniendo la primera y la segunda ruedas dentadas una relación de transmisión de 1:1.
De acuerdo con la presente invención, el momento de las ruedas delanteras con relación a la sección delantera del vehículo se transmitirá a través de la primera rueda dentada y el accionamiento de cadena al sensor que proporcionará la medida del ángulo a través del cual han girado la rueda o ruedas delanteras. Cuando la sección delantera del vehículo pivota con relación a la sección trasera, la primera rueda dentada describirá un arco alrededor del eje de pivotamiento entre las secciones delantera y trasera. Este movimiento de la primera rueda dentada será trasmitido a la segunda rueda dentada y al sensor por medio del el accionamiento de cadena: la rotación de la sección delantera en la misma dirección que las ruedas delanteras se añade al ángulo medido correspondiente al movimiento de la rueda o ruedas delanteras: y la rotación de la sección delantera en la dirección opuesta a las ruedas delanteras se resta del ángulo medido correspondiente al movimiento de la rueda o ruedas delanteras. De esta manera un único sensor proporcionará una medida directa del ángulo de giro real.
De acuerdo con una realización de la invención, los medios para trasmitir el movimiento angular de la rueda o ruedas delanteras a la primera rueda dentada comprenden un árbol montado para la rotación con la rueda o ruedas delanteras, estado la primera rueda dentada montada para la rotación con el árbol.
La invención se describirá ahora sólo a modo de ejemplo, con referencia a los dibujos adjuntas, en los que:
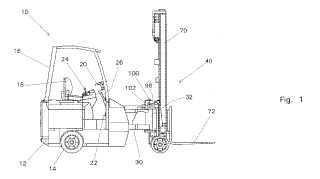
La Figura 1 es un alzado lateral esquemático de una carretilla elevadora articulada de acuerdo con la presente invención;
la Figura 2 es una vista en planta esquemática de la carretilla elevadora ilustrada en la figura 1;
la Figura 3 es una vista en perspectiva de la parte delantera de la carretilla elevadora ilustrada en la figura 1, con el mástil de elevación retirado;
la Figura 4 es una vista en planta en detalle de un conjunto de sensor de ángulo de giro de la carretilla elevadora ilustrada en la Figura 1; y
la Figura 5 es un alzado lateral en sección en detalle de la parte central de la carretilla elevadora ilustrada en la Figura 1.
Como se ilustra en las Figuras 1 y 2, una carretilla elevadora de horquillas articulada 10 tiene una sección trasera 12 que tiene un par de ruedas traseras que se apoyan en el suelo 14 montadas en un eje transversal fijo. Las ruedas traseras 14 son accionadas mediante medios de accionamiento independientes, por ejemplo motores eléctricos o hidráulicos (no mostrados) . El accionamiento de las ruedas traseras 14 se puede controlar independientemente para proporcionar control diferencial cuando la carretilla elevadora 10 está girando.
La sección trasera 12 de la carretilla elevadora 10 define una cabina 16 que tiene un asiento 18, un volante 20, pedales de control de accionamiento 22, palanca de control de mecanismo de elevación 24 y una palanca de articulación 26. La sección trasera 12 tanbien aloja una fuente de energía, por ejemplo un motor de combustión interna que puede accionar una bomba hidráulica o generador, o un paquete de batería. Los contrapesos también están portados en la parte trasera de la sección trasera 12.
Un brazo 30 se extiende hacia delante desde la parte delantera de la sección trasera 12, un tubo de cojinete 32 que se extiende verticalmente está asegurado al extremo delantero del brazo 30.
Una sección delantera 40 está pivotablemente conectada a la sección trasera 12 por medio de un pivote 42 que está giratoriamente montado en el tubo de cojinete 32. Como se ha ilustrado en las Figuras 3 y 5, la sección delantera 40 comprende una placa trasera que se extiende vertical transversalmente 44 con las placas superior e inferior horizontalmente 46, 48 que se extienden hacia atrás desde las mismas. Las placas 46 y 48 se extienden una en cada extremo del tubo de cojinete 32, estando el pivote 42 asegurado entre las placas 46, 48.
Los medios de accionamiento, por ejemplo un engranaje accionado (no mostrado) asegurado a la sección delantera 40, en un engranaje accionado (no mostrado) accionado por un motor hidráulico o eléctrico 34, asegurado al brazo 30, está dispuesto para pivotar la sección delantera 40 con relación a la sección trasera 12, bajo el control de la palanca de control de articulación 26. La sección delantera 40 puede ser pivotada con relación a la sección trasera de esta manera 90º o más.
Un mástil de elevación 70 de construcción convencional está montado en barras que se extienden verticalmente 72 aseguradas a la palca trasera 44, de manera convencional. Un par de horquillas 74 está montado en el mástil de elevación, para el movimiento vertical de las mismas.
La placa inferior 48 se extiende hacia delante de la placa trasera 44. Un par de ruedas delanteras próximamente separadas 50 está montado en una plataforma giratoria 52, por medio... [Seguir leyendo]
Reivindicaciones:
1. Un vehículo articulado (10) que comprende una sección trasera (12) y una sección delantera (40) montada en la sección trasera (12) por medio de un pivote que se extiende verticalmente (42) caracterizado porque la sección delantera (40) tiene una o más ruedas delanteras (50) montadas para el movimiento de pivotamiento en un plano horizontal con relación a la sección delantera, porque una primera rueda dentada (90) está montada en un eje vertical, para el movimiento con la sección delantera (40) , porque el eje de la primera rueda dentada (90) está desplazado del eje del pivote (42) entre las secciones delantera y trasera (12, 40) , por tener medios (80) para transmitir movimiento angular con una relación de 1:1 y en la misma dirección, desde la rueda o ruedas delanteras (50) a la rueda dentada (90) porque tiene una segunda rueda dentada (92) montada en la sección trasera (12) del vehículo coaxialmente con el eje del pivote (42) entre las secciones delantera y trasera (12, 40) , estando la segunda rueda dentada (92) conectada accionadamente al sensor giratorio (100) , estando la primera y la segunda ruedas dentadas (90, 92) conectadas accionadamente por medio de una cadena (96) , teniendo la primera y la segunda ruedas dentadas (90, 92) una relación de transmisión de 1:1.
2. Un vehículo articulado (10) de acuerdo con la reivindicación 1, caracterizado porque la sección trasera (12) tiene un par de ruedas traseras (14) , siendo las ruedas traseras (14) accionadas independientemente, generando el sensor (100) una señal correspondiente al ángulo de giro real de la rueda o ruedas delanteras (50) , siendo dicha señal utilizada para controlar el accionamiento diferencial a las ruedas traseras (14) como una función del ángulo de giro real medido por el sensor (100) .
3. Un vehículo articulado (10) de acuerdo con la reivindicación 1 ó 2, caracterizado porque el sensor (100) es un potenciómetro.
4. Un vehículo articulado (10) de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque el árbol con engranajes (80) transmite el movimiento angular de la rueda o ruedas delanteras (50) a la primera rueda dentada (90) , estando el árbol (80) montado en la sección delantera (40) , siendo el eje del árbol (80) paralelo a y estando separado del eje del pivote (42) entre las secciones delantera y trasera (12, 40) del vehículo (10) .
5. Un vehículo articulado (10) de acuerdo con la reivindicación 4, caracterizado porque un acoplamiento flexible está dispuesto en el árbol (80) para acomodar cualquier desalineamiento entre el eje de rotación de la rueda o ruedas (50) y el eje del árbol (80) .
6. Un vehículo articulado (10) de acuerdo con una cualquiera de las reivindicaciones 1 a 3, caracterizado porque los medios para transmitir el movimiento angular desde la rueda o ruedas delanteras (50) a la primera rueda dentada (90) son un árbol flexible, una parte del árbol flexible remota de la rueda o ruedas
(50) a la que la primera rueda dentada (90) está asegurada, estando montada en la sección delantera (40) , paralela al eje del pivote (42) entre las secciones delantera y trasera (12, 40) y separada de las mismas.
7. Un vehículo articulado (10) de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque un brazo radial (106) en un rotor (104) del sensor (100) se acopla entre un par de espigas (108) que sobresalen de una cara extrema de la segunda rueda dentada (92) para acoplar la segunda rueda dentada (92) al sensor (100) .
8. Un vehículo articulado (10) de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque el vehículo (10) es una carretilla elevadora de horquillas articulada.
Patentes similares o relacionadas:
Dispositivo de control remoto para grúa, máquina de construcción y/o camión industrial, y sistema que comprende este dispositivo de control remoto y una grúa, una máquina de construcción y/o un camión industrial, del 13 de Mayo de 2020, de LIEBHERR-WERK BIBERACH GMBH: Dispositivo de control remoto para una grúa, una máquina de construcción o un camión industrial, con un terminal móvil en forma de tableta que comprende una […]
MONTACARGAS DE ESTRUCTURA COMPACTA, del 21 de Abril de 2020, de EP Equipment Co., Ltd: 1. Montacargas de estructura compacta, compuesto por una carrocería, con una cabina en su parte superior y un asiento en la cabina , la estructura […]
Sistema de posicionamiento de superficies de apriete, del 25 de Marzo de 2020, de CASCADE CORPORATION: Un sistema de control para una mordaza de manejo de carga que se puede montar en un vehículo, teniendo dicha mordaza un par de superficies […]
Sistema de estabilización de máquinas de explotación automotrices, del 18 de Marzo de 2020, de Manitou Italia S.r.l: Un método para controlar estabilizadores de tijera de máquinas de explotación automotrices, tales como manipuladores telescópicos o similares, […]
Sistema de detección de obstáculos para una plataforma de trabajo aérea, del 19 de Febrero de 2020, de JLG INDUSTRIES,INC.: Un conjunto de plataforma que comprende: una plataforma de trabajo que incluye un piso de la plataforma y un riel de seguridad que se extiende […]
Telemanipulador con un sistema de blindaje, del 13 de Noviembre de 2019, de Manitou Italia S.r.l: Un telemanipulador que comprende un sistema de blindaje, el cual, a su vez, comprende: una estructura de cabina para dicho telemanipulador […]
Procedimiento y dispositivo de vigilancia de apoyo para carro que comprende un medio estabilizador, del 5 de Noviembre de 2019, de MANITOU BF: Procedimiento de vigilancia de apoyo para carro que comprende un medio estabilizador, caracterizado por que el mencionado procedimiento comprende las etapas: - de bajada […]
 Módulos enchufables amovibles para vehículos de manipulación de materiales, del 30 de Septiembre de 2019, de EP Equipment Co., Ltd: 1. Una carrocería del vehículo y un módulo enchufable del controlador de un vehículo de manipulación de materiales, que comprenden:
una carrocería […]
Módulos enchufables amovibles para vehículos de manipulación de materiales, del 30 de Septiembre de 2019, de EP Equipment Co., Ltd: 1. Una carrocería del vehículo y un módulo enchufable del controlador de un vehículo de manipulación de materiales, que comprenden:
una carrocería […]