Captador de posición lineal o rotativo de imán permanente para la detección de un objetivo ferromagnético.
Captador magnético sin contacto adecuado para medir el desplazamiento angular o lineal de al menos un objetivo ferromagnético móvil (4),
que comprende al menos un imán permanente (1), al menos un elemento ferromagnético (2) y al menos un elemento magneto-sensible (3), presentando el imán permanente (1) una superficie superior enfrentada al objetivo ferromagnético (4) caracterizado por que el imán permanente (1) tiene una forma sensiblemente cilíndrica o paralelepipédica y presenta una cavidad (5), estando colocado el elemento ferromagnético (2) en el interior de la cavidad (5) y estando colocado el elemento magneto-sensible en la cavidad (5) por encima del elemento ferromagnético (2) y por debajo de la superficie superior del imán (1).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2009/001078.
Solicitante: Moving Magnet Technologies (MMT).
Inventor/es: FRACHON,DIDIER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B5/12 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 5/00 Disposiciones de medida caracterizadas por la utilización de medios mecánicos (instrumentos de los tipos cubiertos por el grupo G01B 3/00 en sí G01B 3/00). › diámetros internos.
- G01D5/14 G01 […] › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en la magnitud de una corriente o voltaje.
PDF original: ES-2529296_T3.pdf
Fragmento de la descripción:
Captador de posición lineal o rotativo de imán permanente para la detección de un objetivo ferromagnético
Campo técnico de la invención
La presente invención se refiere al campo de los captadores magnéticos de posición sin contacto (lineal o rotativo) que comprende al menos un imán permanente y al menos un elemento de medición del campo magnético sensible a la amplitud y/o a la dirección del campo magnético. La invención se refiere más particularmente a unos captadores utilizados para determinar la presencia de una pieza ferromagnética en movimiento (captador digital) o su posición lineal o angular (captador analógico) .
Estado de la técnica anterior
Los captadores magnéticos (digitales y analógicos) de posición lineal o angular tienen numerosas ventajas:
- ningún contacto mecánico con la parte móvil, y por tanto ningún desgaste, -insensibilidad a la suciedad, -reducido coste de producción, -larga vida útil.
Los captadores magnéticos utilizados para determinar la posición y/o la velocidad de una pieza ferromagnética (pieza que presenta unos dientes sobre su periferia) se utiliza típicamente en la industria del automóvil para conocer la posición/velocidad del árbol de levas con el objetivo de controlar el encendido electrónico del motor.
La mayor parte de los captadores digitales magnéticos de posición sin contacto utilizan unos imanes permanentes de forma cilíndrica imantados axialmente asociados a varios elementos magneto-sensibles (sonda diferencial) y ello con el objetivo de eliminar la inducción media vista por las sondas. En efecto, debido a la forma del imán, la inducción vista por una sonda es muy elevada y por lo tanto muy sensible a las variaciones de las propiedades magnéticas del imán con las variaciones de temperatura. El cálculo de la diferencia de inducción entre los dos elementos magneto-sensibles permite anular la inducción media pero por el contrario se convierte en difícil entonces conocer la posición del elemento a detectar en el arranque del sistema. La utilización de varios elementos magnetosensibles induce igualmente un coste más importante y un volumen global del captador más elevado.
Existen igualmente unos sistemas que utilizan un imán permanente, sustancialmente cilíndrico que presenta una cavidad, asociada a un único elemento magneto-sensible. El imán que presenta una cavidad permite disminuir la inducción media a la altura del elemento magneto-sensible y por lo tanto la utilización de un único elemento magneto-sensible. Estos sistemas permiten igualmente conocer la posición del elemento a detectar desde la puesta en marcha del captador.
La tendencia actual para este tipo de captador es tener unos captadores cada vez más pequeños sin pérdida por ello de los rendimientos. Los dos tipos de sistemas descritos anteriormente no permiten una disminución sustancial del volumen sin sacrificar los rendimientos. Además, la distancia entre el elemento a detectar (objetivo) y el captador es igualmente cada vez más grande y es necesario garantizar los rendimientos y esto no puede realizarse más que por un incremento de la variación de la inducción magnética a la altura del elemento magneto-sensible en función de la posición del objetivo.
Se conoce, en el estado de la técnica, la Patente FR2724722 del solicitante y la Patente US6043646 que describen un captador de posición/velocidad digital con un imán permanente sustancialmente cilíndrico que utiliza un único elemento magneto-sensible. Los sistemas descritos permiten obtener a la altura del elemento magneto-sensible una inducción media muy próxima a 0 G, pero cualquier disminución del tamaño del imán implica una disminución de la sensibilidad del captador y por lo tanto una disminución de los rendimientos.
Se conoce igualmente la Patente US5781005 que describe un captador digital de posición utilizado para la detección de una pieza ferromagnética que presenta una pluralidad de dientes. Este captador utiliza dos imanes permanentes imantados en una misma dirección y pegados contra una placa ferromagnética. Una sonda de efecto Hall colocada por encima de este conjunto, entre el objetivo y el imán, mide la variación de la inducción magnética en una dirección paralela a la imantación. Estando colocado el elemento magneto-sensible de la sonda en la proximidad del objetivo. Con un sistema de ese tipo, es difícil tener una inducción media próxima a 0 G y una disminución del diámetro exterior conduce a una disminución de los rendimientos.
Se conoce igualmente en el estado de la técnica la patente de FR2845469 de la solicitante, que describe un captador analógico de posición lineal o rotativo. Este captador analógico mide la posición de una pieza
ferromagnética en movimiento (lineal o rotativo) por medio de la variación de la inducción generada por la variación de reluctancia entre una pieza ferromagnética y un imán permanente, siendo medida la variación de la inducción mediante una sonda de efecto Hall. El problema de este sistema es que la reducción del tamaño del captador que comprende el imán y la sonda implica una disminución de los rendimientos y una dificultad para trabajar con una inducción media a la altura de la sonda de efecto Hall próxima a 0 Gauss.
Exposición de la invención
La presente invención se propone remediar los inconvenientes del estado de la técnica realizando un captador de posición de dimensiones reducidas que permita detectar una información de posición desde que se alimenta el captador, sin alterar sus rendimientos.
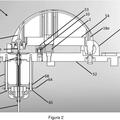
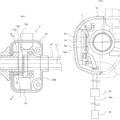
Para hacer esto, la invención se propone utilizar un imán permanente sensiblemente con forma de paralelepípedo o de cilindro que presenta una cavidad, en la que se inserta al menos un elemento magneto-sensible y una pieza ferromagnética con forma sustancialmente de cono.
Con este título, la invención se refiere a un captador magnético sin contacto adecuado para medir el desplazamiento angular o lineal de al menos un objetivo ferromagnético móvil (4) , que comprende al menos un imán permanente (1) , al menos un elemento ferromagnético (2) y al menos un elemento magneto-sensible (3) , presentando el imán permanente una superficie superior en relación al objetivo ferromagnético (4) en la que el imán permanente (1) tiene una forma sensiblemente cilíndrica o paralelepipédica y presenta una cavidad (5) , estando colocado el elemento ferromagnético (2) en el interior de la cavidad (5) y estando colocado el elemento magneto-sensible en la cavidad (5) por encima del elemento ferromagnético (2) y por debajo de la superficie superior del imán (1) .
Este captador es capaz de aportar en un volumen reducido unos rendimientos iguales o incluso superiores a los captadores actuales.
Según una variante no limitativa, el imán permanente será cilíndrico con forma de U imantados sustancialmente axialmente.
Preferiblemente, se colocará una pieza ferromagnética cónica truncada en el interior de la cavidad del imán permanente. Esta pieza cónica tendrá su base fija sobre la parte horizontal de la U del imán permanente. Esta pieza ferromagnética tiene como objetivo canalizar las líneas de campo generadas por el imán hacia el o los elementos magneto-sensibles y crear una zona de inducción reducida cuando el captador no está en presencia del objetivo a detectar. La forma de cono truncado de la pieza ferromagnética no es limitativa, por ejemplo se podría concebir igualmente una pirámide truncada de base rectangular.
Preferiblemente, el elemento magneto-sensible se colocará por encima de la parte truncada del cono ferromagnético en una zona de inducción media próxima a 0 G y medirá la componente axial del campo magnético más cercana a la parte más estrecha del cono ferromagnético truncado. De manera práctica, los elementos magneto-sensibles (sonda de efecto Hall, AMR, GMR, ...) están disponibles generalmente encapsulados en una caja plástica. Es imposible entonces poner al elemento magneto-sensible en contacto con el elemento ferromagnético sino que la caja que contiene al elemento magneto-sensible se colocará de manera que se minimice la distancia entre la pieza ferromagnética y el elemento magneto-sensible.
Preferiblemente, las partes verticales de la U del imán permanente sobresalen de los dos lados del elemento magneto-sensible y lo más próximos al objetivo a detectar.
Preferiblemente, el elemento magneto-sensible será una sonda simple de efecto Hall de tipo interruptor de umbral de conmutación fijo próximo a 0 G. En una variante, el elemento magneto-sensible será una sonda de efecto Hall de tipo interruptor de umbral programable.
En otra variante, el elemento... [Seguir leyendo]
Reivindicaciones:
1. Captador magnético sin contacto adecuado para medir el desplazamiento angular o lineal de al menos un objetivo ferromagnético móvil (4) , que comprende al menos un imán permanente (1) , al menos un elemento ferromagnético (2) y al menos un elemento magneto-sensible (3) , presentando el imán permanente (1) una superficie superior enfrentada al objetivo ferromagnético (4) caracterizado por que el imán permanente (1) tiene una forma sensiblemente cilíndrica o paralelepipédica y presenta una cavidad (5) , estando colocado el elemento ferromagnético (2) en el interior de la cavidad (5) y estando colocado el elemento magneto-sensible en la cavidad (5) por encima del elemento ferromagnético (2) y por debajo de la superficie superior del imán (1) .
2. Captador magnético de desplazamiento angular o lineal según la reivindicación 1, caracterizado por que el elemento ferromagnético (2) tiene una forma de cono truncado.
3. Captador magnético de desplazamiento angular o lineal según la reivindicación 1, caracterizado por que el 15 elemento ferromagnético (2) tiene una forma de cilindro de base trapezoidal.
4. Captador magnético de desplazamiento angular o lineal según la reivindicación 1 o 2, caracterizado por que el imán (1) presenta una imantación sustancialmente perpendicular a su base.
5. Captador magnético de desplazamiento angular o lineal según una cualquiera de las reivindicaciones 1 a 4, caracterizado por que el elemento magneto-sensible (3) mide la amplitud del campo magnético.
6. Captador magnético de desplazamiento angular o lineal según una cualquiera de las reivindicaciones 1 a 4, caracterizado por que el elemento magneto-sensible (3) mide la dirección del campo magnético. 25
7. Captador magnético de desplazamiento angular o lineal según una cualquiera de las reivindicaciones 1 a 6, caracterizado por que el elemento magneto-sensible (3) está lo más próximo posible a la pieza ferromagnética (2) .
8. Captador magnético de desplazamiento angular o lineal según una cualquiera de las reivindicaciones 1 a 7, 30 caracterizado por que el elemento magneto-sensible (3) es un elemento de efecto Hall.
9. Captador magnético de desplazamiento según una cualquiera de las reivindicaciones 1 a 8, caracterizado por que el objetivo ferromagnético (4) es móvil en un plano perpendicular a la dirección de imantación.
10. Captador magnético de desplazamiento según una cualquiera de las reivindicaciones 1 a 9, caracterizado por que el objetivo ferromagnético (4) es móvil en un plano paralelo a la dirección de imantación.
11. Captador magnético de desplazamiento rotativo según la reivindicación 9, caracterizado por que el objetivo ferromagnético (4) es móvil alrededor de un eje paralelo a la dirección de imantación. 40
12. Captador magnético de desplazamiento rotativo según la reivindicación 10, caracterizado por que el objetivo ferromagnético (4) es móvil alrededor de un eje perpendicular a la dirección de imantación.
13. Captador magnético de desplazamiento según una cualquiera de las reivindicaciones 1 a 12, caracterizado por
que el elemento magneto-sensible (3) está colocado en una zona en la que la inducción media según la dirección de imantación es próxima a 0 Gauss.
14. Captador magnético de desplazamiento según la reivindicación 13, caracterizado por que el elemento magneto-sensible (3) está asociado a un circuito electrónico de procesamiento de la señal que tiene un punto de 50 basculación próximo a 0 Gauss.
Patentes similares o relacionadas:
 Sistema y método de calibración de la longitud del trayecto, del 29 de Julio de 2020, de Thermo Electron Scientific Instruments LLC: Aparato para medir una propiedad óptica de una muestra, el aparato que comprende:
a. un brazo oscilante ;
b. una fuente de luz;
c. una primera superficie […]
Sistema y método de calibración de la longitud del trayecto, del 29 de Julio de 2020, de Thermo Electron Scientific Instruments LLC: Aparato para medir una propiedad óptica de una muestra, el aparato que comprende:
a. un brazo oscilante ;
b. una fuente de luz;
c. una primera superficie […]
Procedimiento para el monitoreo del transporte de recipientes de líquidos en un dispositivo de análisis automático, del 15 de Julio de 2020, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Procedimiento para el monitoreo del transporte de un recipiente de líquido con una pinza de sujeción pasiva fijada a un brazo de transferencia […]
Codificador giratorio, del 22 de Abril de 2020, de CMR Surgical Limited: Un codificador de posición para detectar la posición giratoria relativa de la primera y segunda partes alrededor de un eje de rotación, […]
Sistemas y métodos de conmutación de salida para sensores de campo magnético, del 11 de Marzo de 2020, de INFINEON TECHNOLOGIES AG: Un sensor, que comprende: un elemento sensor; y una circuitería del sensor acoplada al elemento sensor, el elemento sensor configurado para detectar […]
 Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Procedimiento y aparato para codificación magnética seccional de un eje y para medición de ángulo de rotación, velocidad de rotación y par, del 22 de Enero de 2020, de GENERAL ELECTRIC COMPANY: Sistema que comprende un eje codificado magnéticamente y un sistema de detección de campo magnético, caracterizado por el hecho de […]
Cuentarrevoluciones magnético para la autodetección de estados de error al determinar el número de revoluciones detectables con este cuentarrevoluciones, del 23 de Octubre de 2019, de Leibniz-Institut für Photonische Technologien e.V: Cuentarrevoluciones magnético o contador de desplazamiento para la autodetección de estados de error al determinar números de revoluciones o números de desplazamientos […]
Recopilación y/o procesamiento de datos de múltiples sensores, del 4 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: detectar el movimiento de un dispositivo en respuesta a la recepción de una señal desde un acelerómetro […]