Aparato limpiador manual para la limpieza de tuberías.
Aparato limpiador manual (1) para la limpieza de tuberías mediante un árbol flexible (6),
equipado con un motor (2), un tambor (5) para recoger y soltar el árbol flexible (6), con una cámara (10), en la que se encuentran dispuestos varios rodillos (12, 13, 14) con ejes (A1, A2, A3) que actúan radialmente sobre el árbol flexible (6) y que están dispuestos a distancias radiales desde el eje del árbol flexible (6), en donde uno de los rodillos (12) está apoyado en un soporte (16), cuya distancia radial desde el eje del árbol flexible (6) se puede ajustar por medio de un botón de ajuste (11), caracterizado por que entre el botón de ajuste (11) y el soporte (16) está dispuesto un dispositivo para limitar el par de fuerzas, mediante el cual las fuerzas radiales del rodillo (12) pueden limitarse a valores máximos predeterminables.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11001820.
Solicitante: ROTHENBERGER AG.
Nacionalidad solicitante: Alemania.
Dirección: Spessartstrasse 2-4 65779 Kelkheim ALEMANIA.
Inventor/es: HERZ,STEFAN, BODE,OLAF.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B08B9/045 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B08 LIMPIEZA. › B08B LIMPIEZA EN GENERAL; PREVENCION DE LA SUCIEDAD EN GENERAL (cepillos A46; dispositivos para limpieza del hogar o análogos A47L; separación de partículas sólidas de líquidos o gases B01D; separación de sólidos B03, B07; pulverización o aplicación de líquidos u otros materiales fluidos sobre superficies en general B05; dispositivos de limpieza para transportadores B65G 45/10; operaciones combinadas de lavado, llenado y cierre de botellas B67C 7/00; inhibición de la corrosión o de la incrustación en general C23; limpieza de calles, de vías férreas, de playas o de terrenos E01H; partes constitutivas, detalles o accesorios de piscinas para nadar o para chapotear especialmente adaptados a la limpieza E04H 4/16; protección contra las cargas electrostáticas o supresión de estas cargas H05F). › B08B 9/00 Limpieza de objetos huecos por métodos o con aparatos especialmente adaptados a este efecto (B08B 3/12, B08B 6/00 tienen prioridad). › estando los dispositivos de limpieza rotando mientras se desplazan (B08B 9/047 tiene prioridad).
PDF original: ES-2492515_T3.pdf
Fragmento de la descripción:
Aparato limpiador manual para la limpieza de tuberías
La Invención se refiere a un aparato limpiador manual para la limpieza de tuberías mediante un árbol flexible, equipado con un motor, un tambor para recoger y soltar el árbol flexible, con una cámara, en la que se encuentran dispuestos varios rodillos que actúan radialmente sobre el árbol flexible y que están dispuestos a distancias radiales desde el eje del árbol flexible, en donde uno de los rodillos está apoyado en un soporte, cuya distancia radial desde el eje del árbol flexible se puede ajustar por medio de un botón de ajuste.
Estado actual de la técnica:
Por el documento DE 10 2008 015 532 A1 se conoce un aparato limpiador con un árbol flexible, cuyo movimiento longitudinal es producido por medio de tres rodillos que actúan sobre el árbol flexible con componentes de fuerza radiales y axiales. Dos de los rodillos están alojados de manera localmente fija entre sí formando un ángulo agudo, mientras que el eje del tercer rodillo puede pivotar alrededor de un eje axial, de tal manera que este tercer rodillo puede ponerse en contacto de colaboración con uno de los otros dos rodillos. El movimiento de giro del tercer rodillo se realiza por medio de un tubo de agarre que actúa a través de una hilera dentada sobre un sector dentado en el soporte del tercer rodillo. Si allí se encuentra dispuesto un botón de ajuste para ajustar la fuerza de contacto radial del tercer rodillo, el mismo, aunque actúa a través de un elemento elástico sobre el soporte del tercer rodillo, sin embargo está unido de forma resistente a la torsión con su eje de ajuste, de tal manera que en caso de un manejo incorrecto del botón de ajuste, p. ej. con un alicate, puede ocurrir una sobrecarga y deformación del sistema de rodillos, y también del árbol flexible, resultando en el fallo del aparato. Sin embargo, el estado actual de la técnica también incluye otros aparatos limpiadores, en los que se disponen tres rodillos con los mismos ajustes angulares relativos alrededor del eje del sistema y alrededor del eje del árbol flexible:
Por ejemplo, por el documento US 2002/0083538A1 se conoce el rodear el camino de transporte de un árbol flexible, que parte desde un tambor de almacenamiento, mediante una caja cilindrica, desde cuya circunferencia parten hacia adentro en distribución equidistante tres fijaciones con soportes para rodillos. En un punto de la circunferencia hay una tubuladura con una rosca interior, en la que está enroscado un árbol hueco con una rosca exterior. Este árbol hueco tiene además una rosca interior para enroscar un botón de ajuste, mediante el cual se puede ajustar la posición angular y la situación radial del correspondiente rodillo en relación al eje del árbol flexible. La carrera radial de la disposición de rodillos 155 está limitada por un pasador 180 que de acuerdo con las Figs. 4 y 4A choca contra un muelle laminado 205. Esto hace que el ajuste en el caso de árboles flexibles delgados sea ineficaz, y si se aplica una elevada fuerza de ajuste manual en el vástago roscado 215, se puede fracturar el muelle laminado. Sin embargo, no se desvelan ni se prevén medios para limitar la fuerza de rotación del botón de ajuste.
Objetivo de la invención:
Por lo tanto, el objetivo de la presente invención consiste en proporcionar un aparato limpiador del tipo descrito al comienzo, mediante el cual se excluya la posibilidad de una sobrecarga del sistema de accionamiento debido a un ajuste incorrecto de las fuerzas radiales y/o una transgresión de las tolerancias dimensionales. Este objetivo no puede ser logrado a través del documento US 2002/0083538 A1.
Logro del objetivo:
El logro de dicho objetivo se caracteriza por que entre el botón de ajuste y el soporte se dispone un dispositivo para limitar el par de fuerzas, mediante el cual las fuerzas radiales del rodillo se pueden limitar a valores máximos predeterminadles.
En el contexto de otras formas de realización adicionales de la presente invención, es particularmente ventajoso, si bien sea individualmente o en combinación:
* el botón de ajuste encierra un espacio vacío, dentro del cual se proyecta un árbol que está rodeado por un anillo de apoyo, sobre el cual se apoya un cuerpo de fricción, cuyo lado opuesto está en contacto con una superficie interior del botón de ajuste, y cuando el árbol se apoya de forma giratoria sobre un anillo extensible,
* el cuerpo de fricción está formado por al menos dos resortes de disco que en estado extendido se tocan entre
sí,
* el árbol se extiende de forma estanqueizada en el botón de ajuste,
* el árbol en disposición coaxial presenta una rosca exterior con el cual se guía en una rosca interior provista en una tubuladura que se proyecta en dirección radial desde la cámara,
* el árbol presenta una escotadura coaxial, en la que se guía un vástago cilindrico que se proyecta a partir del soporte para el rodillo ajustable,
* entre el árbol y el soporte se dispone un elemento elástico para ajustar la fuerza de contacto del rodillo contra el árbol flexible,
* el elemento elástico rodea el vástago,
* el botón de ajuste en su lado exterior está provisto con un perfilamiento favorable para el agarre, y/o si
* el aparato limpiador presenta un solo grupo de tres rodillos distribuidos alrededor de la circunferencia del árbol flexible, de los que los ejes de dos rodillos están orientados en una posición fija de tal manera que los mismos actúan sobre el árbol flexible con fuerzas de transporte opuestas, y si el eje del tercer rodillo se puede ajustar de tal manera en su posición espacial que la fuerza de transporte del rodillo ajustable apoya opcionalmente la fuerza de transporte bien sea de uno de los rodillos de posición fija o del otro rodillo de posición fija.
Descripción detallada de la invención:
Un ejemplo de realización del objeto de la presente invención y sus modos de funcionamiento, así como otras ventajas adicionales, serán descritos a continuación más detalladamente con referencia a las Figs. 1 a 3.
En las Figs.:
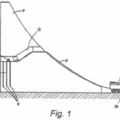
La Fig. 1 es una vista exterior en perspectiva en combinación con un diagrama funcional,
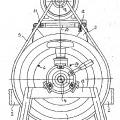
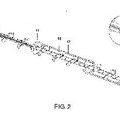
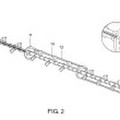
la Fig. 2 es una vista axial al interior de la cámara en el extremo del tubo de agarre para ilustrar el
funcionamiento de los tres rodillos, y
la Fig. 3 muestra una sección ampliada de la parte superior de la Fig. 2.
En la Fig. 1 se representa un aparato limpiador completo 1, del que forman parte un motor 2 con un asidero 3 y un interruptor 4, tal como se conoce también de las máquinas taladradoras portátiles. Al motor se conecta un tambor giratorio 5 para alojar un árbol flexible 6. El tambor 5 tiene un tubo guía 7 conectado fijamente (Fig. 2) que está rodeado coaxialmente por un tubo de agarre 8, el cual está provisto con una protección manual 9 en forma de embudo en dirección hacia el tambor 5. Esta protección manual 9 cubre parcialmente la pared frontal 5a del tambor 5 que igualmente tiene forma de embudo. El tubo de agarre 8 pasa a una cámara cilindrica 10, en la que se encuentra alojado el mecanismo de ajuste completo para el movimiento del árbol flexible 6. Un botón de ajuste 11 sirve para ajustar la fuerza de contacto del rodillo ajustable contra los dos rodillos de posición fija, según se explicará más abajo. En la Fig. 1 solo se muestra respectivamente el extremo de dicho árbol flexible 6, y por el aumento de grosor local se puede deducir que este extremo ya posee en sí una función de herramienta.
El eje del rodillo ajustable 12 (en la Fig. 2, arriba) en un principio se encuentra paralelo al eje del árbol flexible 6, de tal manera que no se produce ningún movimiento axial del mismo. Si el tubo de agarre 8 y el tambor 5 se empujan uno contra el otro, ocurre una retracción del árbol flexible 6. Si el tubo de agarre 8 y el tambor 5 se separan uno del otro, entonces ocurre un avance del árbol flexible 6.
El recuadro inferior en la Fig. 1 explica el funcionamiento del botón de ajuste 11: El giro del mismo hacia la derecha en la dirección de la flecha "+" produce una intensificación de la fuerza de contacto del rodillo ajustable contra los otros dos rodillos. El giro del mismo hacia la izquierda en la dirección de la flecha produce una disminución de la fuerza de contacto del rodillo ajustable 12 contra los otros dos rodillos. Todas estas funciones aún serán explicadas más detalladamente a continuación en lo relacionado con la Fig. 3, en la que se mantienen los mismos símbolos de referencia usados hasta ahora.
De acuerdo con la Fig. 2, la cámara 10 contiene tres rodillos 12, 13 y 14, de los cuales el rodillo 12 puede ser pivotado... [Seguir leyendo]
Reivindicaciones:
1. Aparato limpiador manual (1) para la limpieza de tuberías mediante un árbol flexible (6), equipado con un motor (2), un tambor (5) para recoger y soltar el árbol flexible (6), con una cámara (10), en la que se encuentran dispuestos varios rodillos (12, 13, 14) con ejes (A1, A2, A3) que actúan radialmente sobre el árbol flexible (6) y que están dispuestos a distancias radiales desde el eje del árbol flexible (6), en donde uno de los rodillos (12) está apoyado en un soporte (16), cuya distancia radial desde el eje del árbol flexible (6) se puede ajustar por medio de un botón de ajuste (11), caracterizado por que entre el botón de ajuste (11) y el soporte (16) está dispuesto un dispositivo para limitar el par de fuerzas, mediante el cual las fuerzas radiales del rodillo (12) pueden limitarse a valores máximos predeterminadles.
2. Aparato limpiador de acuerdo con la reivindicación 1, caracterizado por que el botón de ajuste (11) encierra un espacio hueco (11 a), dentro del cual se proyecta un árbol (19) que está rodeado por un anillo de apoyo (26), sobre el cual se apoya un cuerpo de fricción (27) cuyo lado opuesto está en contacto con una superficie interior del botón de ajuste (11), y por que el árbol (19) se apoya de manera giratoria en un anillo extensible (28).
3. Aparato limpiador de acuerdo con la reivindicación 2, caracterizado por que el cuerpo de fricción (27) está formado por al menos dos resortes de disco que en estado extendido se tocan entre sí.
4. Aparato limpiador de acuerdo con la reivindicación 2, caracterizado por que el árbol (19) se extiende de manera estanqueizada en la dirección axial dentro del botón de ajuste (11).
5. Aparato limpiador de acuerdo con la reivindicación 2, caracterizado por que el árbol (19) en disposición coaxial presenta una rosca exterior (20) con la que se guía en una rosca interior (22) que se encuentra dentro de una tubuladura (21) que se proyecta en dirección radial a partir de la cámara (10).
6. Aparato limpiador de acuerdo con la reivindicación 2, caracterizado por que el árbol (19) presenta una escotadura axial (23), en la que se extiende un vástago cilindrico (17) que se proyecta a partir del soporte (16) para el rodillo ajustable (12).
7. Aparato limpiador de acuerdo con la reivindicación 6, caracterizado por que entre el árbol (19) y el soporte (16) se encuentra dispuesto un elemento elástico (18) para ajustar la fuerza de contacto del rodillo (12) contra el árbol flexible (6).
8. Aparato limpiador de acuerdo con las reivindicaciones 6 y 7, caracterizado por que el elemento elástico (18) rodea el vástago (17).
9. Aparato limpiador de acuerdo con la reivindicación 1, caracterizado por que el botón de ajuste (11) en su lado exterior está provisto con un perfilamiento (11c) que facilita el agarre.
10. Aparato limpiador de acuerdo con la reivindicación 1, caracterizado por un solo grupo de tres rodillos (12, 13, 14) distribuidos alrededor de la circunferencia del árbol flexible (6), de los cuales los ejes (A2, A3) de dos de los rodillos (13, 14) están orientados en posición fija, de tal manera que actúan con fuerzas de transporte opuestas sobre el árbol flexible (6), y por que el eje (A1) del tercer rodillo (12) puede ser ajustado en su posición espacial de tal manera que la fuerza de transporte del rodillo ajustable (12) apoya opcionalmente la fuerza de transporte bien sea de uno de los rodillos de posición fija (13) o del otro rodillo de posición fija (14).
Patentes similares o relacionadas:
Sistemas para limpiar cavidades corporales y para dirección endoscópica, del 1 de Mayo de 2019, de Motus Gi Medical Technologies Ltd: Un sistema para limpieza colónica, incluyendo: una envuelta incluyendo: un cuerpo incluyendo un depósito fecal de al menos 2 litros de volumen ; […]
Dispositivo de transmisión de potencia y método de transmisión de potencia, del 14 de Septiembre de 2016, de Picote Oy Ltd: Dispositivo de transmisión de potencia que comprende: - un cable , y un conducto que rodea, al menos parcialmente, el cable, […]
Procedimiento y dispositivo de decapado de tubos por acción de un fluido a presión muy alta, del 10 de Agosto de 2016, de PREZIOSO LINJEBYGG: Procedimiento de decapado de un tubo por acción de un fluido a una presión muy alta superior a 1500 bar, en el que: - se hace pasar […]
 Máquina limpiadora de tubos con un tambor para un eje flexible, del 5 de Agosto de 2015, de ROTHENBERGER AG: Máquina limpiadora de tubos con un tambor accionado por un motor que gira alrededor de un eje (4, A-A) y un dispositivo de avance para hacer avanzar y retraer […]
Máquina limpiadora de tubos con un tambor para un eje flexible, del 5 de Agosto de 2015, de ROTHENBERGER AG: Máquina limpiadora de tubos con un tambor accionado por un motor que gira alrededor de un eje (4, A-A) y un dispositivo de avance para hacer avanzar y retraer […]
 DISPOSITIVO INTERCAMBIADOR TÉRMICO MEJORADO PARA TRATAMIENTO DE LÍQUIDOS Y OTROS, del 25 de Marzo de 2013, de MORENO GARCIA,ANTONIO: El dispositivo de la presente invención consiste en un intercambiador térmico y es aplicable al tratamiento térmico de productos tales como zumos, pulpas y otros productos para […]
DISPOSITIVO INTERCAMBIADOR TÉRMICO MEJORADO PARA TRATAMIENTO DE LÍQUIDOS Y OTROS, del 25 de Marzo de 2013, de MORENO GARCIA,ANTONIO: El dispositivo de la presente invención consiste en un intercambiador térmico y es aplicable al tratamiento térmico de productos tales como zumos, pulpas y otros productos para […]
 DISPOSITIVO INTERCAMBIADOR TÉRMICO MEJORADO PARA TRATAMIENTO DE LÍQUIDOS Y OTROS, del 17 de Enero de 2013, de MORENO GARCIA,ANTONIO: El dispositivo de la presente invención consiste en un intercambiador térmico y es aplicable al tratamiento térmico de productos tales como zumos, […]
DISPOSITIVO INTERCAMBIADOR TÉRMICO MEJORADO PARA TRATAMIENTO DE LÍQUIDOS Y OTROS, del 17 de Enero de 2013, de MORENO GARCIA,ANTONIO: El dispositivo de la presente invención consiste en un intercambiador térmico y es aplicable al tratamiento térmico de productos tales como zumos, […]
Equipo de limpieza para la limpieza de tuberías, del 27 de Junio de 2012, de ROTHENBERGER AG: Equipo de limpieza de guiado manual para la limpieza de tuberías mediante un árbol en espiral , equipadocon un motor , un tambor para el […]
 EQUIPO HIDRODINAMICO DE LIMPIEZA DE TALADROS DE DRENAJE EN PRESAS, del 6 de Noviembre de 2009, de REQUENA ARCAJO,MARCOS ANDRES
FERNANDEZ MOURE,ALEXIA: Equipo hidrodinámico de limpieza de taladros de drenaje en presas, que comprende una bomba de alta presión , montada sobre un equipo […]
EQUIPO HIDRODINAMICO DE LIMPIEZA DE TALADROS DE DRENAJE EN PRESAS, del 6 de Noviembre de 2009, de REQUENA ARCAJO,MARCOS ANDRES
FERNANDEZ MOURE,ALEXIA: Equipo hidrodinámico de limpieza de taladros de drenaje en presas, que comprende una bomba de alta presión , montada sobre un equipo […]