Sistema para caracterizar el estilo de conducción de los conductores de un vehículo.
Un método para caracterizar el estilo de conducción (P) de un conductor de un vehículo,
que comprende lassiguientes etapas:
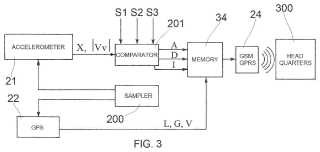
a) detección de aceleración (X, vv) del vehículo por medio de un acelerómetro (21),
b) comparación de dicha aceleración (X, vv) con valores umbral preestablecidos (S1, S2, S3) para detectaraceleraciones/deceleraciones súbitas (A, D) indicativas de conducción inadecuada yaceleraciones/deceleraciones muy súbitas (I) indicativas de un accidente,
c) detección de valores de latitud (L), longitud (G) y velocidad (V) del vehículo por medio de un módulo GPS(22),
d) almacenamiento de dichas aceleraciones/deceleraciones súbitas (A, D) y aceleraciones/deceleraciones muysúbitas (I) y dichos valores de latitud (L), longitud (G) y velocidad (V) del vehículo en una memoria (34),
e) transmisión de dichos valores (A, D, I, L, G, V) almacenados en la memoria (34) a un centro de operacionesremoto (300) por medio de un módulo GSM/GPRS (24), en el que el centro de operaciones remoto (300) calculainformación sobre el número de aceleraciones/deceleraciones súbitas (Tii) y el número de accidentes (Txiv) yrealiza, además, las siguientes etapas (f, g, h):
f) proyección de los valores de latitud (L) y longitud (G) detectados por el GPS (22) en cartografía digital de talmanera que, mediante el seguimiento de la ruta del vehículo en el mapa, se obtiene información sobre:
- kilómetros totales recorridos por el vehículo (Ti),
- kilómetros recorridos por el vehículo en diferentes tipos de carretera (Tiv, Tv, Tvi, Tix, Tx),
- tránsitos del vehículo a través de un cruce o alrededor de una rotonda (Tvii, Tviii)
g) comparación de los valores de velocidad (V) detectados por el GPS (22) con valores de velocidad media (VM)calculados como la velocidad media de los vehículos en la sección de carretera específica, para obtenerinformación (Tiii) sobre el número de veces que la velocidad es superada por el conductor,
h) emparejamiento de los valores de velocidad (V) detectados por el GPS (22) con las carreteras recorridas porel vehículo detectadas a partir de la cartografía, para obtener información (Txi, Txii, Txiii) sobre la velocidadmedia en diversos tipos de carreteras,
i) generación de un polinomio (P) con los valores de la información (Ti- Txiv) obtenida en las etapas (e, f, g, h)que representa la caracterización del estilo de conducción del conducto del vehículo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12154654.
Solicitante: Infomobility.it S.p.A.
Nacionalidad solicitante: Italia.
Dirección: Via Isidoro e Lepido Facii Frazione Sant'Atto-, Zona Industriale 64100 Teramo ITALIA.
Inventor/es: IACHINI,FRANCO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G08B25/01 FISICA. › G08 SEÑALIZACION. › G08B SISTEMAS DE SEÑALIZACION O DE LLAMADA; TRANSMISORES TELEGRAFICOS DE ORDENES; SISTEMAS DE ALARMA. › G08B 25/00 Sistemas de alarma en los que el emplazamiento del lugar donde existe la condición que acciona la alarma es señalado a una estación central, p. ej. sistemas telegráficos de incendio o de policía. › caracterizados por el medio de transmisión.
PDF original: ES-2404207_T3.pdf
Fragmento de la descripción:
Sistema para caracterizar el estilo de conducción de los conductores de un vehículo La presente solicitud de patente para invención industrial se refiere a un sistema de evaluación de un indicador de riesgo asociado con el estilo de conducción de un conductor de un vehículo.
En el mercado se conocen ampliamente navegadores por satélite para vehículos, que operan con protocolo GPS para indicar la posición exacta de un vehículo en el territorio.
En el mercado se conocen ampliamente dispositivo de localización por satélite, que se usan también como dispositivo antirrobo para señalar la posición de un vehículo robado.
También se conocen detectores de accidentes (sensores de choque) para vehículos, generalmente en forma de acelerómetros que detectan una súbita variación de la aceleración del vehículo indicativa de un choque. Dichos sensores de choque generalmente están conectados a los airbags del vehículo.
También se conocen teléfonos móviles integrados en el vehículo, que operan con protocolo GSM o GPRS para realizar llamadas telefónicas desde el vehículo.
Los documentos US2005/037730, W02009/133450, GB2390208 y US2002/037707 desvelan dispositivos montados a bodo de un vehículo para señalar un accidente a una oficina competente, tal como servicio de asistencia en carretera, policía y similares.
Sin embargo, ninguno de los documentos anteriores mencionados anteriormente desvela el uso de dichos dispositivos para evaluar un indicador de riesgo del conductor de un vehículo.
Generalmente, las compañías de seguros elaboran las políticas de seguros en base al riesgo de accidente del conductor de un vehículo. Por lo tanto, sería deseable para las compañías de seguros tener un sistema capaz de evaluar el riesgo de accidente del conductor de un vehículo objetivamente.
El propósito de la presente invención es proporcionar un sistema de evaluación del indicador de riesgo del conductor de un vehículo que es fiable y sencillo de fabricar y de usar.
Estos propósitos se consiguen de acuerdo con la invención, con características reivindicadas en la reivindicación independiente 1.
Realizaciones ventajosas son evidentes a partir de las reivindicaciones dependientes.
De acuerdo con la invención el sistema de evaluación de un indicador de riesgo del conductor de un vehículo usa un acelerómetro para detectar los valores de aceleración y deceleración de un vehículo, un GPS para detectar la posición y velocidad de un vehículo y un módulo GSM/GPRS para enviar los datos detectados a un centro de operaciones que calcula la evaluación del indicador de riesgo del conductor de un vehículo.
Características adicionales de la invención serán más evidentes a partir de la siguiente descripción, que se refiere a una realización meramente ilustrativa y no limitante, ilustrada en los dibujos adjuntos, en los que:
La figura 1 es una vista en perspectiva en despiece ordenado de una caja usada para contener el dispositivo para la implementación del proceso de acuerdo con la invención;
La figura 2 es un diagrama de bloques que muestra los bloques funcionales y el funcionamiento del dispositivo para la implementación del proceso de acuerdo con la invención;
La figura 3 es un diagrama de bloques que muestra el proceso de la invención; y
La figura 4 es un diagrama de bloques que muestra el proceso implementado por el centro de operaciones.
En referencia a las figuras mencionadas anteriormente, se desvela el dispositivo para implementación del proceso de acuerdo con la invención, que está indicado generalmente con el número (1) .
En referencia a la figura 1, el dispositivo (1) comprende una caja contenedora (2) y un conector de soporte (3) .
La caja contenedora (2) comprende una base (4) y una tapa (5) y está adaptada para contener todos los bloques funcionales mostrados en la figura 2, tal como se ilustra a continuación.
Volviendo a la figura 1, el conector de soporte (3) está fijado a un parabrisas (100) del vehículo con cinta permanente. Tal como se muestra en la figura 2, se proporcionan contactos eléctricos (6) en el conector de soporte (3) para entrar en contacto con los contactos eléctricos (6a) de un conector complementario (7) provisto sobre la base de la caja contenedora.
En referencia a la figura 2, el conector de soporte (3) está conectado a una batería (101) del vehículo por medio de cables eléctricos.
Volviendo a la figura 1, el dispositivo (1) puede estar provisto opcionalmente de un módulo de comunicación por Bluetooth (9) que puede insertarse en una ranura dedicada (10) de la base de la caja (2) .
En referencia a la figura 2, el módulo de comunicación por Bluetooth (9) comunica con un módulo de transmisión por Bluetooth (102) conectado a un dispositivo de recuperación (103) adaptado para recuperar información sobre el vehículo de la unidad de control del vehículo.
La caja (2) contiene un microcontrolador (20) , un acelerómetro (21) , un módulo GPS por satélite (22) , una unidad de fuente de energía (23) y un módulo de telefonía móvil GSM/GPRS (24) .
El microcontrolador (20) controla el funcionamiento de todos los dispositivos del dispositivo (1) .
El acelerómetro (21) es, preferiblemente, del tipo de 3 ejes, adaptado para detectar aceleraciones o deceleración súbitas del vehículo indicativas de conducción inadecuada o accidente.
El módulo GPS por satélite (22) está provisto de una antena GPS integrada (25) para detectar la posición exacta del vehículo.
La unidad de fuente de energía (23) comprende un generador de tensión (26) que toma 9-36 V de potencia de la batería (101) del vehículo y los convierte para suministrar energía adecuadamente a todos los dispositivos contenidos en la caja del dispositivo. La unidad de fuente de energía (23) también comprende una batería recargable de apoyo (27) contenida en la caja (2) .
El módulo de telefonía móvil GSM/GPRS (24) comprende una antena GSM integrada (28) para la conexión con una red de telefonía móvil. El módulo de telefonía móvil GSM/GPRS (24) también comprende una toma de audio (29) y una salida de audio (30) de tipo manos libres. En referencia a la figura 1, la toma de audio (29) y la salida de audio
(30) están conectadas respectivamente a un micrófono (31) y un altavoz (32) instalado en las paredes de la tapa (5) de la caja. El módulo de telefonía móvil GSM/GPRS (24) está adaptado para conectar con un centro de asistencia de manera que envíe mensajes y/o ponga al conductor del vehículo en comunicación con el centro de asistencia.
La instalación del dispositivo (1) en el parabrisas (100) del vehículo permite posicionar el micrófono (31) y el altavoz
(32) en la mejor posición para uso por parte del conductor.
El dispositivo (1) comprende una memoria de almacenamiento de datos (34) . La memoria (34) puede ser de tipo flash NAND en serie.
Opcionalmente, el dispositivo (1) puede comprender una unidad LED (33) , un timbre de audio (35) y un botón de emergencia (36) .
La unidad LED (33) , el timbre de audio (35) y el botón de emergencia (36) están instalados en una pared de la tapa (5) de la caja para ser accesibles para el usuario. El botón de emergencia (36) está conectado al módulo de telefonía móvil (24) para poner al conductor en comunicación con el centro de asistencia.
Volviendo a la figura 1, hay que tener en cuenta que el conector de soporte (3) , la base (4) y la tapa (5) de la caja se cierran mutuamente con llave o tornillo antimanipulación. Además, el microcontrolador (20) monitoriza constantemente los contactos eléctricos (6, 6a) del conector (3) y de la caja (2) para detectar un posible intento de desconexión de la caja del conector o de manipulación.
El funcionamiento del dispositivo (1) se desvela a continuación en este documento.
El módulo GPS (22) detecta constantemente la posición exacta del vehículo. Cuando el vehículo tiene un accidente, el acelerómetro (21) detecta el accidente y envía la señal al microcontrolador (20) . El microcontrolador (20) activa el módulo GSM/GPRS (24) que envía una señal de accidente al centro de asistencia, junto con la posición exacta del vehículo detectada por el módulo GPS (22) . De este modo, el centro de asistencia puede proporcionar asistencia rápida al vehículo. Además, por medio del módulo GSM/GPRS (24) , se pone al conductor en comunicación con el centro de asistencia.
El dispositivo (1) de la invención permite las siguientes funciones:
• Localizar el vehículo, en caso de robo, por medio del módulo GPS (22) .
•... [Seguir leyendo]
Reivindicaciones:
1. Un método para caracterizar el estilo de conducción (P) de un conductor de un vehículo, que comprende las siguientes etapas:
a) detección de aceleración (X, vv) del vehículo por medio de un acelerómetro (21) , b) comparación de dicha aceleración (X, vv) con valores umbral preestablecidos (S1, S2, S3) para detectar aceleraciones/deceleraciones súbitas (A, D) indicativas de conducción inadecuada y aceleraciones/deceleraciones muy súbitas (I) indicativas de un accidente, c) detección de valores de latitud (L) , longitud (G) y velocidad (V) del vehículo por medio de un módulo GPS (22) , d) almacenamiento de dichas aceleraciones/deceleraciones súbitas (A, D) y aceleraciones/deceleraciones muy súbitas (I) y dichos valores de latitud (L) , longitud (G) y velocidad (V) del vehículo en una memoria (34) , e) transmisión de dichos valores (A, D, I, L, G, V) almacenados en la memoria (34) a un centro de operaciones remoto (300) por medio de un módulo GSM/GPRS (24) , en el que el centro de operaciones remoto (300) calcula información sobre el número de aceleraciones/deceleraciones súbitas (Tii) y el número de accidentes (Txiv) y realiza, además, las siguientes etapas (f, g, h) : f) proyección de los valores de latitud (L) y longitud (G) detectados por el GPS (22) en cartografía digital de tal manera que, mediante el seguimiento de la ruta del vehículo en el mapa, se obtiene información sobre:
- kilómetros totales recorridos por el vehículo (Ti) , -kilómetros recorridos por el vehículo en diferentes tipos de carretera (Tiv, Tv, Tvi, Tix, Tx) ,
- tránsitos del vehículo a través de un cruce o alrededor de una rotonda (Tvii, Tviii)
g) comparación de los valores de velocidad (V) detectados por el GPS (22) con valores de velocidad media (VM) calculados como la velocidad media de los vehículos en la sección de carretera específica, para obtener información (Tiii) sobre el número de veces que la velocidad es superada por el conductor, h) emparejamiento de los valores de velocidad (V) detectados por el GPS (22) con las carreteras recorridas por el vehículo detectadas a partir de la cartografía, para obtener información (Txi, Txii, Txiii) sobre la velocidad media en diversos tipos de carreteras, i) generación de un polinomio (P) con los valores de la información (Ti- Txiv) obtenida en las etapas (e, f, g, h) que representa la caracterización del estilo de conducción del conducto del vehículo.
2. Un método de acuerdo con la reivindicación 1, caracterizado por que si la señal de GPS no está disponible para el módulo GPS (22) , la velocidad del vehículo (V) es detectada por un dispositivo de recuperación de información (103) conectado a la unidad de control del vehículo y es enviada a la memoria (34) del dispositivo por medio de módulos de Bluetooth (102, 9) .
3. Un método de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado por que dichos valores umbral (2) comprenden:
con un accidente.
4. Un método de acuerdo con la reivindicación 3, caracterizado por que dicho acelerómetro (21) detecta un vector de aceleración va (x, y, z) en su sistema de referencia a lo largo de tres ejes que se convierte, por medio de rotación, en un vector de aceleración vv (x, y, z) en el sistema de referencia del vehículo, en el que el componente (X) del vector (vv) , corresponde a la medición de la aceleración instantánea en la dirección de desplazamiento del vehículo y se compara con el primer valor umbral (S1) y el segundo valor umbral (S2) para detectar respectivamente aceleraciones (A) y deceleraciones (D) súbitas y en el que el módulo del vector (vv) se compara con dicho tercer valor umbral (S3) para detectar aceleraciones/deceleraciones muy súbitas (I) indicativas de un accidente.
5. Un método de acuerdo con la reivindicación 4, caracterizado por que cuando el módulo del vector (vv) supera el tercer valor umbral (S3) , todas las aceleraciones/deceleraciones (A, D) muestreadas en un intervalo de tiempo que comprende el momento en el que se supera el tercer valor umbral (S3) se registran en la memoria (34) .
6. Un método de acuerdo con la reivindicación 5, caracterizado por que dicho intervalo de muestreo de aceleraciones/deceleraciones (A, D) está comprendido entre 10 segundos antes y 3 segundos después del momento en el que se supera el tercer valor umbral (S3) .
7. Un método de acuerdo con una cualquiera de las reivindicaciones 3 a 6, caracterizado por que dicho primer valor umbral (S1) es igual a 1/2 g, dicho segundo valor umbral (S2) es igual a -1/2 g y dicho tercer valor umbral (S3)
es igual a 2 g.
8. Un método de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado por que el acelerómetro (21) es muestreado con una frecuencia comprendida entre 800 - 1200 Hz y dicho módulo GPS (22) es muestreado con una frecuencia comprendida entre 1 y 10 Hz.
- un primer valor umbral (S1) indicativo de una aceleración súbita,
- un segundo valor umbral (S2) indicativo de una deceleración súbita, y
- un tercer valor umbral (S3) indicativo de una aceleración/deceleración muy súbita que se produce
Patentes similares o relacionadas:
Dispositivo de interfaz, procedimiento y programa informático para controlar dispositivos sensores, del 10 de Junio de 2020, de Ubiquiti Inc: Un primer dispositivo de interfaz para su uso en un sistema de domótica , comprendiendo el primer dispositivo de interfaz: un módulo de comunicación […]
Sistema y método para colaboración multimedia activada por biosensores, del 12 de Junio de 2019, de Mutualink Inc: Un sistema que comprende una primera agencia conectada a una Red de Área Personal, PAN , para un usuario a través de […]
Sistema y método para facilitar asistencia en situaciones de peligro, del 24 de Mayo de 2019, de KING, RUDOLF C. ,DR.: Sistema que comprende un dispositivo portátil basado en procesador que tiene al menos una unidad de comunicación y una unidad de determinación […]
Aparato y método para prueba de conectividad de verificación de audio de alarma WIFI de panel de alarma, del 16 de Mayo de 2019, de HONEYWELL INTERNATIONAL INC.: Un aparato que comprende: una unidad de control acoplada a una pluralidad de detectores de monitorización de condición; y […]
Procedimiento para transmitir información meteorológica y/o información de predicción meteorológica, del 9 de Mayo de 2019, de NavPos Systems GmbH: Procedimiento para la emisión de informaciones meteorológicas y/o informaciones de predicciones meteorológicas, en cuyo caso se utiliza […]
Señal de localización para equipos de emergencia, del 25 de Abril de 2019, de CONTINENTAL TEVES AG & CO. OHG: Unidad de llamada de emergencia para un vehículo, que presenta la unidad de llamada de emergencia que presenta: una unidad de detección para la […]
Sistema para la detección y notificación de accidentes en motos, del 8 de Abril de 2019, de CENTRO TECNOLÓGICO DEL MUEBLE Y LA MADERA DE LA REGIÓN DE MURCIA: 1. Sistema para la detección y notificación de accidentes en motos caracterizado porque comprende - un módulo ubicado en la moto con medios para […]
Dispositivo de defensa y sistema de defensa doméstico, del 14 de Marzo de 2019, de Seitz, Martin: Dispositivo de defensa móvil para la defensa contra y la disuasión de una atacante o de un ladrón con un aparato de defensa, con un adaptador […]