Sistema de dirección para uso de vehículos en carriles angostos.
Sistema de dirección para servicio de vehículos que ofrece la posibilidad de ir hacia delante y hacia atrás en carriles angostos y es capaz de remolcar remolques al mismo momento.
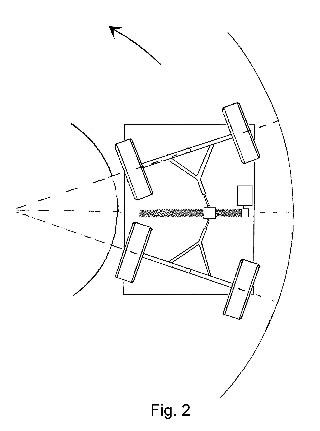
La dirección del vehículo está constituida por un husillo (4) (montado perpendicular al sentido de conducción) sostenido por el chasis que al girar por medio de un motor eléctrico (3) produce el desplazamiento longitudinal de una tuerca (5). A esta tuerca están conectadas giratoriamente dos timones telescópicos (6) que a su vez están fijados por una construcción triangular (12) a dos rodetes en los extremos del chasis, delantero y trasero respectivamente, en tanto desde dichas piezas inferiores se acopla dos bastidores con los ejes (1 y 2) cada uno con dos ruedas montadas, que produce la dirección del vehículo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201130781.
Solicitante: VAN SOEST, Pieter Adriaan Laurens.
Nacionalidad solicitante: Países Bajos.
Inventor/es: VAN SOEST,Pieter Adriaan Laurens.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01G9/14 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01G HORTICULTURA; CULTIVO DE HORTALIZAS, FLORES, ARROZ, FRUTOS, VID, LÚPULO O ALGAS; SILVICULTURA; RIEGO (recolección de frutas, verduras, lúpulo o productos similares A01D 46/00; crecimiento de algas unicelulares C12N 1/12). › A01G 9/00 Cultivo en recipientes, camas o invernaderos (de setas A01G 18/00; cultivo sin suelo A01G 31/00 ); Bordes para bancales, zona de césped o similares. › Invernaderos (campanas A01G 13/04).
- B62D13/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 13/00 Dirección adaptada especialmente a los remolques (atalaje de tracción y de dirección combinados B60D). › para ejes de giro central.
Fragmento de la descripción:
Sistema de dirección para uso de vehículos en carriles angostos
Sector de la técnica La presente invención se encuadra en la dirección de los vehículos simples o acoplados para industria, minería, estaciones de ferrocarril, agricultura y más concretamente en la horticultura. Siempre en la situación donde se debe regresar por el mismo carril sin cambiar el vehículo de posición.
Estado de la técnica Actualmente, la agricultura ecológica intensiva, especialmente los cultivos en los invernaderos están en auge. El futuro de la agricultura ecológica en invernadero depende en gran medida del desarrollo de sistemas de producción que sean competitivos en costes con aquellos de la agricultura regular.
Como el mayor coste del cultivo es la mano de obra es evidente que reduciéndolo con el menor coste posible, repercute rápidamente en beneficios. Los trabajos se pueden generalmente identificar como repetitivos y son manipulaciones frecuentes del cultivo: entutorar, podar, cosechar. Otras son la repetitiva aplicación de productos fitosanitarios que conlleva riesgos para la salud y la seguridad de los trabajadores.
Esto invita también a la automatización de operaciones en los invernaderos. En primer lugar ayuda a reducir el tiempo que el trabajador dedica a desplazarse andando en el pasillo con cosecha o haciendo trabajos de manipulación de cultivo, (esto puede suponer kilómetros a cabo de una jornada laboral) . En segundo lugar puede sustituir al ser humano en operaciones, tales como la fumigación, que constituyen un riesgo demostrado para los trabajadores. En tercer lugar, la repetibilidad y precisión de los sistemas robóticos pueden ayudar a un incremento en la calidad y productividad de los invernaderos y en una mejora laboral de los trabajadores.
En los invernaderos en países con climas más fríos como Francia, Bélgica, Holanda los invernaderos que utilizan un sistema costoso de calefacción llamado ‘tubo-rail’, (que consiste en dos tubos por pasillo puestos sobre soportes justo por encima del suelo) ; es lógico que sirvan como guía para todo tipo de transporte dentro de los pasillos hasta para carros de cultivo de 2 metros de altura (andamios) utilizados para entutorar las plantas.
En los paises con climas templados como es el mediterráneo, no es preciso calefacción de gran poder calorífico y basta la calefacción con aire caliente o a baja temperatura con tubos de poli-etileno. Si el invernadero estuviese equipado con calefacción tubo-rail, los medios de transporte podrían moverse hacia delante y atrás guiados por el rail. Hacer una instalación solo para tener este sistema ‘tubo-rail’ es muy costosa. Actualmente solo están disponibles en el mercado carros con un volante que no tiene sistema de ‘guiado’ y que no pueden ir marcha atrás en un pasillo inferior a 1, 5 m de ancho lo que reduce considerablemente la superficie cultivada .
Para ello, la presente invención se centra en la dirección del vehículo eléctrico autoguiado, que ofrece un sistema base para su aplicación generalizada, con las mismas prestaciones que un vehículo eléctrico para ‘tubo-rail’, pero económicamente asequible. Una alternativa económicamente más rentable para los agricultores mediterráneos de invernadero (en especial los agricultores de cultivos ecológicos) , que tienen labores repetitivas entre los pasillos de cualquier cultivo.
El sistema de dirección esta automatizado mediante un sistema-guía que no utiliza raíles u otras guías, que obstaculicen el paso al andar, utilizando un alambre dentro el suelo, con un detector de señal para dirigir el vehículo. Es decir: el vehículo puede desplazarse automáticamente a una velocidad máxima de 2 Km./h en un pasillo estrecho de 75 cm de ancho, hacia delante y hacia atrás sin desviarse ni dañar las plantas, y sin que el trabajador deba interrumpir el trabajo para girar el volante al desplazarse el vehículo, ni para retroceder. El trabajador, solo maneja la velocidad con un pedal en ambas direcciones atrás – adelante, en relación con el trabajo (podar, cosechar, enredar) ; de manera que puede dedicar ambas manos y toda su atención y tiempo exclusivamente al cultivo. Al final del pasillo, el trabajador puede dirigir el vehículo hacia otro pasillo. No hay problemas en pasar por encima de mangueras de calefacción porque no las daña.
Concluyendo, la invención aporta las siguientes ventajas:
• No precisa tubo-rail: Para cultivos en tierra o la minería sin guías físicas como tubos de calefacción o rail. Sirve de base general para cualquier carrocería o equipamiento por ejemplo: Mástiles de pulverizadores (robot tratamientos) , plataforma de trabajo en altura (andamio) , plataforma de cosecha, plataforma de carga.
• Aumento de productividad en cultivos de suelo: el trabajador puede dedicarse continuamente a su trabajo, al desplazarse automáticamente el vehículo hacia delante y atrás, sin detenerse para controlar la dirección.
• Movimiento preciso en pasillos estrechos.
• El vehículo puede acoplarse con otros vehículos mediante conexión física y eléctrica para remolcarlos y/o empujarlos. Sirve por ejemplo para cargar la cosecha, y esto no reduciría las prestaciones: siempre puede moverse hacia delante y atrás por el pasillo.
• Alta capacidad de tracción, ideal para terrenos irregulares.
• Esta máquina sirve de complemento en la automatización del trabajo repetitivo, con su respectiva reducción de gastos y aumento de tiempo de trabajo efectivo.
• Aplicación de filoguiado en agricultura como base general para otras aplicaciones en desarrollo tecnológico: tratamiento fitosanitarios, transporte cosecha.
• Su sistema de dirección, permite una gran maniobrabilidad en espacios reducidos por lo que las ruedas siguen en el mismo carril, reduciendo así el desplazamiento lateral del vehículo y mejorando la maniobralidad
Explicación de la invención La presente invención esta relacionada con mejoras en el sistema de dirección para servicio de vehículos en carriles angostos, sin posibilidad de girar el vehículo para volver al inicio, caracterizado por la dirección conjunta de los dos ejes interconectados y montados bajo un chasis.
Este objetivo y ventaja se proporciona por este sistema de dirección donde ambos ejes, delantero y trasero respectivamente, están montados en bastidores acoplados a dos rodetes en los extremos del chasis, ambos pivotantes sobre el centro sostenido por el chasis. Desde la parte inferior del rodete están fijados a una construcción triangular, que a su vez acaba en un timón telescopio conectado giratoriamente a una tuerca. Esta tuerca se desplaza longitudinalmente por un husillo (montado perpendicular al sentido de conducción) sostenido por el chasis que al girar por medio de un motor eléctrico produce la dirección del vehículo.
El acoplamiento de otros vehículos iguales es posible y sirven como remolque o a su vez como vehículo de cabeza. El conjunto, incluido los vehículos que son remolcados puede moverse hacia delante y hacia atrás sin salir del carril. La posición del remolque, respecto al vehículo precedente, es obtenida mediante un sensor lineal, de manera que, conocida la posición de éste en el sistema, es posible calcular el ángulo que forman el remolque y el vehículo precedente.
El sistema puede moverse dentro del invernadero, bien autónomamente gracias a sensores que le permiten conocer su posición respecto a una guía inductiva enterrada o encima del suelo según un plan establecido previamente, bien ser controlado directamente por un operador humano con auxilio de un mando manual.
Tanto el vehículo primero como los remolcados pueden llevar carga de pago, que puede consistir en fumigadores, manipuladores, sistemas de inspección o cualquier equipo que pueda considerarse necesario para el trabajo en los invernaderos como aparatos de fumigación, cámaras de inspección o brazos robot para recolección u otras tareas.
Con estas características técnicas las principales ventajas que se obtienen son la posibilidad de desplazamiento autónomo o semiautónomo del sistema en entornos no modificados, como son los invernaderos; la posibilidad de realizar funciones muy diversas relacionadas con las tareas agrícolas (en virtud de los diferentes equipos que pueden portarse como carga de pago) , y la posibilidad de ser controlado por un operador de forma relativamente fácil. En suma, la presente invención constituye una plataforma polivalente para el trabajo en invernaderos.
Descripción de los dibujos Figura 1: Esquema del vehículo. El eje delantero (1) y el trasero (2) son ejes directrices,...
Reivindicaciones:
1. Sistema de dirección de un vehículo para uso en carriles angostos caracterizado por la dirección conjunta de los ejes (1 y 2) mediante un husillo (4) montado perpendicularmente al sentido de la conducción. A lo largo del husillo se puede desplazar una pieza (5) mediante un motor eléctrico (3) . Dos timones telescopicos (6) están conectados giratoriamente a la pieza y a su vez están fijados también a una construcción triangular (7) conectada al eje delantero (1) y trasero (2) respectivamente. Al girar el husillo por medio del motor eléctrico produce la dirección del vehículo por la dirección conjunta de los ejes.
2. Sistema de dirección conforme reivindicación 1, donde por la longitud del chasis se utilizan dos husillos por la dirección conjunta de los ejes. Los husillos giran conjuntamente mediante un eje de transmisión o similar con el motor eléctrico.
3. Sistema de dirección conforme reivindicación 1 y 2, robotizado para servicio en invernaderos, que comprende:
a un vehículo dotada de medios de tracción (8) , de control de velocidad y sentido de marcha y parada del sistema, y una plataforma (11) para carga de pago,
b uno o varios vehículos idénticos que sirven de remolque opcional, capaz de llevar carga de pago, y dotado de sensores que le permitan al sistema conocer su posición de giro respecto al vehículo precedente,
4. Sistema robotizado para servicio en invernaderos según la reivindicación 1, 2 y 3, caracterizado por: que el vehículo está dotado de guiado automático de sensores de proximidad inductivos (9 y 10) en los lados extremos del vehículo, que cada uno solo esta activado cuando funciona como parte delantera del vehículo mediante la selección de la marcha ‘atrás-delante’, utilizando el campo magnético producido a lo largo de un hilo eléctrico extendido encima o dentro el suelo en el centro de los pasillos, formando una red de dos o varios hilos paralelos que le permiten conocer el camino del recorrido y guiar el vehículo accionando a través de un controlador, el motor eléctrico del sistema de dirección.
5. Sistema robotizado para servicio en invernaderos según la reivindicación 1, 2, 3 y 4, caracterizado porque el método de control del sistema está organizado en dos niveles, de acuerdo con el tipo de interacción que puede tener el usuario con ellos:
a. Nivel de interfaz de usuario, en el que se pueden realizar las operaciones de más alto nivel, como arrancar, apagar, cambio sentido de marcha etc., mientras el controlador automático lleva a cabo la actividad de dirección como seguir una guía inductiva, admitir órdenes de la guía, sensores inductivos.
b. Nivel de control del sistema, en el que se lleva a cabo una interfaz entre las acciones descritas en los procesos del nivel anterior y los sensores y accionadores del sistema con mando manual de dirección y parado.
6. Sistema robotizado para servicio en invernaderos según la reivindicación 1, 2, 3, 4 y 5, caracterizado porque los actuadores que permiten el avance y el giro del vehículo son de tipo eléctrico.
7. Sistema robotizado para servicio en invernaderos según la reivindicación 1, 2, 3, 4, 5 y 6, caracterizado porque la energía para el funcionamiento de los actuadores se obtiene de un banco de baterías que a su vez puede cargarse de la red eléctrica o de un panel fotovoltaico montado encima de la plataforma como techo.
Patentes similares o relacionadas:
INVERNADERO DE RAÍZ, del 31 de Julio de 2020, de GUDE GARCIA, JOSE FRANCISCO: 1. Invernadero de raíz, de los configurados por una chapa metaliza plegable, caracterizado por presentar una estructura de perfiles laterales unidos en sus extremos por […]
ESTRUCTURA MODULAR PARA INVERNADEROS E INVERNADEROS CONFORMADOS A PARTIR DE DICHA ESTRUCTURA, del 20 de Mayo de 2020, de INVERNADEROS EUROPEOS, SLL: 1. Estructura modular para invernaderos que comprende al menos un módulo de invernadero compuesto por una pluralidad de marcos previstos para […]
Toldo para cubrir y proteger cultivos, invernaderos, aperos, plantaciones e instalaciones varias contra el granizo y otros meteoros, del 24 de Abril de 2020, de CARRERA JUAREZ, Sarai: 1. Toldo para cubrir y proteger cultivos, invernaderos, aperos, plantaciones e instalaciones varias contra el granizo y otros meteoros, caracterizado por estar hecho de […]
Elemento de cobertura flexible para protector de cultivos, protector de cultivos provisto de tal elemento de cobertura, del 25 de Marzo de 2020, de EUROPLASTIC: Elemento de cobertura flexible, para protector de cultivos , de tipo invernadero, previsto para ser fijado sobre una armadura […]
 Pantalla de invernadero, del 25 de Marzo de 2020, de Aktiebolaget Ludvig Svensson: Una pantalla de invernadero que comprende tiras del material de película que están interconectadas por un sistema de hilo de hebras transversales y hebras […]
Pantalla de invernadero, del 25 de Marzo de 2020, de Aktiebolaget Ludvig Svensson: Una pantalla de invernadero que comprende tiras del material de película que están interconectadas por un sistema de hilo de hebras transversales y hebras […]
Composición, lámina de conversión de color y dispositivo diodo emisor de luz, del 18 de Marzo de 2020, de MERCK PATENT GMBH: Uso de una lamina de conversion de color para agricultura, en el que dicha lamina de conversion de color comprende al menos un material fluorescente inorganico con […]
Pantalla de invernadero de ahorro de energía, del 11 de Marzo de 2020, de AB Ludvig Svensson: Una pantalla de invernadero que comprende tiras de material en película que se interconectan mediante un sistema de estambres de hilos transversales e hilos […]
Método y sistema para tratar un producto, del 11 de Marzo de 2020, de The State of Israel - Ministry of Agriculture & Rural Development, Agricultural Research Organization (ARO) (Volcani Center): Un método de tratamiento de un producto agrícola , que comprende: proporcionar un recipiente que tiene una abertura dimensionada para […]