Procedimiento y aparato para mover contenedores para residuos y para vaciar su contenido.
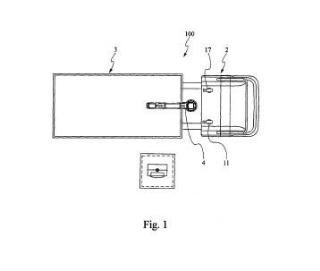
Procedimiento y aparato (100) para mover contenedores para residuos y para vaciar su contenido.
El aparato está provisto de:
- un vehículo automóvil (2) que comprende al menos un cuerpo de almacenamiento de residuos (3);
- al menos un brazo articulado (4) llevado por dicho vehículo automóvil (2);
- al menos un elemento de enganche (5), dispuesto en un extremo de dicho brazo articulado (4), y
- al menos un sistema (6) computarizado para mover el brazo articulado (4).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131492.
Solicitante: MONDINI ENGINEERING SA.
Nacionalidad solicitante: Suiza.
Dirección: - - - 6950 Tesserete SUIZA.
Inventor/es: MONDINI,Stefano.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65F3/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65F RECOGIDA O RETIRADA DE BASURAS DOMESTICAS O DESPERDICIOS SIMILARES (desinfección de basuras A61L; desintegrado de basuras B02C; clasificación de basuras B03B, B07B; vehículos a mano para el transporte de recipientes de basuras B62B; soportes de sacos B65B 67/00; transformación de basuras en fertilizantes C05F; transformación de basuras en combustibles sólidos C10L; colectores, pozos E03F; disposiciones en los edificios para evacuar las basuras E04F 17/10; hornos de incineración de basuras F23G). › B65F 3/00 Vehículos especialmente adaptados para la recogida de basuras (vehículos en general B60; equipo o accionamiento auxiliar de vehículos B60K; descarga del contenido por basculado del vehículo completo B65G; aparatos sobre ruedas para vaciar los colectores o los pozos E03F 7/10). › con medios para descargar en ellos los receptáculos de basuras (estructura de transportadores B65G; medios de carga separados de los vehículos B66F; sistemas de controles hidráulicos en general F15B).
- B65F3/04 B65F 3/00 […] › Uniones, brazos giratorios o soportes giratorios para elevar o bascular después los receptáculos.
Fragmento de la descripción:
Procedimiento y aparato para mover contenedores para residuos y para vaciar su contenido La presente invención se refiere a un dispositivo y a un procedimiento para mover contenedores para residuos y para vaciar su contenido.
Generalmente, los contenedores para la recogida de residuos, y en general para la recogida diferenciada de residuos, tales como vidrio, papel, plástico, etc., se realizan con sus aberturas de carga sustancialmente dispuestas en su parte superior, mientras que su vaciamiento se realiza a través de aberturas situadas en su parte inferior.
Normalmente, dichos contenedores están conformados a modo de campana o con una forma en sección, sustancialmente, cuadrada y/o rectangular. El movimiento y el vaciado del contenido de dichos contenedores se realiza por medio de vehículos automóviles, tal como un camión, que comprenden un cuerpo de almacenamiento de residuos, apto para contener los residuos, y un brazo mecánico giratorio articulado con múltiples ejes que está habitualmente situado entre el cuerpo de almacenamiento y la cabina del vehículo automóvil.
El brazo articulado con múltiples ejes tiene por objeto enganchar el contenedor de residuos y transferirlo hasta por encima del cuerpo de almacenamiento para descargar los residuos en el interior de este último. En general, para llevar a cabo las mencionadas operaciones, el operario debe abandonar la cabina de conducción, después de haber situado el vehículo automóvil en las proximidades del contenedor, y accionar manualmente el brazo articulado con múltiples ejes. A tal efecto, de hecho, se han dispuesto unos medios mecánicos de control para el brazo articulado con múltiples ejes en el exterior del vehículo automóvil. El operario debe por tanto llevar el brazo articulado con múltiples ejes encima del contenedor, controlar el correcto posicionamiento del brazo articulado con múltiples ejes respecto a la parte superior del contenedor y proceder a su enganche. Con este fin, el brazo articulado con múltiples ejes presenta en su extremo un dispositivo de enganche. Después de haber enganchado el contenedor con el brazo articulado con múltiples ejes y haberlo transportado hasta por encima del cuerpo de almacenamiento del vehículo automóvil, el operario puede vaciar el contenido del propio contenedor en el interior del cuerpo de almacenamiento. Una vez vaciado el contenido, el operario debe accionar nuevamente el brazo articulado con múltiples ejes para devolver el contener a su posición original.
El solicitante ha observado que las citadas operaciones requieren mucho tiempo y están relacionadas con la habilidad y la experiencia del operario.
El solicitante ha observado, además, que dichas operaciones resultan particularmente críticas en el caso de contenedores soterrados.
En este último caso, resulta importante, de hecho, que el levantamiento y el posterior descenso del contenedor respecto a su asiento de alojamiento soterrado se realicen perfectamente en vertical con el fin de evitar daños del contenedor o de su asiento de alojamiento.
El solicitante ha descubierto que la problemática que se ha expuesto en lo que antecede puede superarse con un procedimiento y un aparato que automatice algunas de las operaciones para mover contenedores para residuos y para vaciar su contenido.
Por lo tanto, en su primer aspecto, la invención se refiere a un procedimiento para mover los contenedores de residuos y para vaciar su contenido mediante un dispositivo que comprende:
un vehículo automóvil que comprende un cuerpo de almacenamiento de residuos;
al menos un brazo articulado, llevado por dicho vehículo automóvil;
al menos un elemento de enganche, dispuesto en un extremo de dicho brazo articulado;
un sistema computarizado para mover dicho brazo articulado;
comprendiendo dicho procedimiento las etapas siguientes:
a) situar el vehículo automóvil en las proximidades del contenedor que va a vaciarse;
b) mover el brazo articulado para aproximar dicho elemento de enganche a una distancia predeterminada D1 respecto al contenedor que va a vaciarse, situado en una posición de trabajo;
c) situar dicho elemento de enganche encima del contenedor, alineado con su eje vertical;
d) hacer descender dicho elemento de enganche y enganchar dicho contenedor con dicho elemento de enganche por medio de dicho sistema computarizado;
e) levantar verticalmente dicho elemento de enganche conjuntamente con dicho contenedor, manteniendo sustancialmente vertical dicho contenedor; f) hacer girar el brazo articulado para llevar el contenedor que va a vaciarse por encima del cuerpo de almacenamiento de residuos; g) vaciar el contenido de dicho contenedor en el interior del cuerpo de almacenamiento de residuos; h) hacer girar de nuevo el brazo articulado para llevar el contenedor vaciado sobre la posición de trabajo; i) hacer descender el contenedor vaciado para disponerlo de nuevo en su posición de trabajo; caracterizado porque:
- la etapa b) de mover el brazo articulado para aproximar dicho elemento de enganche a una distancia predeterminada D1 respecto al contenedor que va a vaciarse, se controla y se lleva a cabo por el operario; mientas que,
- las etapas e) a i) se llevan a cabo automáticamente por el sistema computarizado. La presente invención, en el aspecto anteriormente mencionado, puede presentar al menos una de las características preferidas que se describen a continuación. Preferentemente, la etapa c) puede comprender las siguientes subetapas:
c1) reconocer, mediante un sistema óptico, la distancia entre dicha posición de dicho elemento de enganche al término de la etapa b) y el eje vertical de dicho contenedor; c2) calcular los movimientos que el brazo articulado debe llevar a cabo para situar dicho elemento de enganche
encima del contenedor, alineado con su eje vertical;
c3) accionar automáticamente, por medio del sistema computarizado, los movimientos calculados en la subetapa c2) . Convenientemente, la etapa c) comprende además las siguientes subetapas: c4) memorizar los movimientos realizados en dicha subetapa c3) .
Ventajosamente, la etapa e) de levantar verticalmente dicho elemento de enganche conjuntamente con el contenedor, manteniendo sustancialmente vertical el contenedor, se lleva a cabo hasta que el contenedor se ha elevado hasta una altura H1 prefijada, mayor que la altura del borde superior del cuerpo de almacenamiento respecto al suelo.
Preferentemente, la etapa b) comprende una subetapa: b1) memorizar los movimientos realizados por el brazo articulado en dicha etapa. De manera conveniente, la etapa f) comprende las siguientes subetapas:
f1) reconocimiento, por parte del sistema computarizado, de que dicho contenedor está situado sobre el cuerpo de almacenamiento de residuos en posición idónea para el vaciamiento; f2) accionamiento, por parte del sistema computarizado, de dicha al menos una escotilla de vaciamiento.
De manera conveniente, el procedimiento según la presente invención comprende, con anterioridad a la etapa b) , una etapa de: l) extraer el elemento de enganche desde una posición de reposo predefinida sobre dicho vehículo automóvil. Preferentemente, las etapas h) y l) se llevan a cabo automáticamente por dicho sistema computarizado haciendo que el brazo articulado vuelva a recorrer los movimientos memorizados en las etapas b) , c) .
De manera conveniente, las etapas h) y l) se llevan a cabo automáticamente por dicho sistema computarizado haciendo que el brazo articulado vuelva a recorrer los movimientos memorizados en las etapas b) , c) modificados con un coeficiente de corrección para evitar interferencias.
Ventajosamente, la etapa b) de mover el brazo articulado para acercar dicho elemento de enganche a una distancia predeterminada D1 respecto al contenedor que va a vaciarse, se controla y se lleva a cabo por el operario, mediante un mando servoasistido.
Según otro aspecto, la presente invención se refiere a un aparato para mover contenedores para residuos y para vaciar su contenido, que comprende: un vehículo automóvil que comprende al menos un cuerpo de almacenamiento de residuos; al menos un brazo articulado llevado por el vehículo automóvil; al menos un elemento de enganche, dispuesto en un extremo de dicho brazo articulado; comprendiendo dicho brazo articulado:
unos primeros medios para el soporte del elemento de enganche; unos segundos medios para la traslación vertical de dichos al menos dichos primeros medios, definiendo un eje de extensión longitudinal (X-X) ;
unos terceros medios para el alojamiento de dichos segundos medios;
unos cuartos medios para producir la rotación de dichos...
Reivindicaciones:
1. Procedimiento para mover contenedores para residuos y para vaciar su contenido mediante un dispositivo, caracterizado porque comprende:
-un vehículo automóvil (2) que comprende un cuerpo de almacenamiento de residuos (3) ;
-al menos un brazo articulado (4) llevado por dicho vehículo automóvil (2) ;
-al menos un elemento de enganche (5) , dispuesto en un extremo de dicho brazo articulado (4) ;
- un sistema computarizado para manipular dicho brazo articulado (4) , comprendiendo dicho procedimiento las etapas siguientes: a) situar el vehículo automóvil (2) en las proximidades del contenedor (16) que va a vaciarse; b) mover el brazo articulado (4) para aproximar dicho elemento de enganche (5) a una distancia
predeterminada D1 respecto al contenedor (16) que va a vaciarse, situado en una posición trabajo; c) situar dicho elemento de enganche (5) sobre el contenedor (16) , alineado con su eje vertical (Y-Y) ; d) hacer descender dicho elemento de enganche (5) y enganchar dicho contenedor (16) mediante dicho
elemento de enganche (5) , por medio de dicho sistema computarizado;
e) levantar verticalmente dicho elemento de enganche (5) conjuntamente con dicho contenedor (16) , manteniendo sustancialmente vertical dicho contenedor (16) ; f) hacer girar el brazo articulado (4) para llevar el contenedor que va a vaciarse sobre el cuerpo de
almacenamiento de residuos (3) ; g) vaciar el contenido de dicho contenedor (16) en el interior del cuerpo de almacenamiento de residuos (3) ; h) hacer girar de nuevo el brazo articulado (4) para llevar el contenedor (16) vaciado sobre la posición de
trabajo; i) hacer descender el contenedor (16) vaciado para disponerlo de nuevo en su posición de trabajo, caracterizado porque:
- la etapa b) destinada a mover el brazo articulado (4) para aproximar dicho elemento de enganche a una distancia predeterminada D1 respecto al contenedor que va a vaciarse, se controla y se lleva a cabo por el operario, mientras que
- las etapas c) a i) se llevan a cabo automáticamente por el sistema computarizado.
2. Procedimiento para mover contenedores para residuos y para vaciar su contenido según la reivindicación 1, caracterizado porque la etapa c) comprende las siguientes subetapas:
c1) reconocer, mediante un sistema óptico, la distancia de posicionamiento D2, entre dicha posición de dicho elemento de enganche (5) al término de la etapa b) , y el eje vertical (Y-Y) de dicho contenedor (16) ;
c2) calcular los movimientos que debe realizar el brazo articulado (4) para situar dicho elemento de enganche (5) sobre el contenedor (16) , alineado con su eje vertical (Y-Y) ;
c3) accionar automáticamente, por medio del sistema computarizado, los movimientos calculados en la subetapa c2) .
3. Procedimiento para mover contenedores para residuos y para vaciar su contenido según la reivindicación 2, caracterizado porque la etapa c) comprende además la subetapa de:
c4) memorizar los movimientos realizados en dicha etapa c3) .
4. Procedimiento para mover contenedores para residuos y para vaciar su contenido según cualquiera de las reivindicaciones anteriores, caracterizado porque la etapa e) destinada a levantar verticalmente dicho elemento de enganche (5) , conjuntamente con dicho contenedor (16) , manteniendo sustancialmente vertical dicho contenedor (16) , se lleva a cabo hasta que el contenedor (16) se ha levantado hasta una altura prefijada H1 mayor que la altura del borde superior (23) del cuerpo de almacenamiento de residuos (3) respecto al suelo.
5. Procedimiento para mover contenedores para residuos y para vaciar su contenido según cualquiera de las reivindicaciones anteriores, caracterizado porque dicha etapa b) comprende una subetapa de:
b1) memorizar los movimientos realizados por el brazo articulado en dicha etapa b) .
6. Procedimiento para mover contenedores para residuos y para vaciar su contenido según cualquiera de las reivindicaciones anteriores, caracterizado porque la etapa g) comprende las siguientes subetapas:
g1) reconocimiento, por parte del sistema computarizado, de que dicho contenedor (16) está situado sobre el cuerpo de almacenamiento de residuos (3) en una posición idónea para el vaciamiento;
g2) accionamiento, por parte del sistema computarizado, de al menos una escotilla de vaciamiento.
7. Procedimiento para mover contenedores para residuos y para vaciar su contenido según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende, con anterioridad a la etapa b) , una etapa de:
l) extraer el elemento de enganche desde una posición de reposo predefinida sobre dicho vehículo automóvil (2) .
8. Procedimiento para mover contenedores para residuos y para vaciar su contenido según cualquiera de las reivindicaciones anteriores, caracterizado porque las etapas h) e i) se llevan a cabo automáticamente por dicho sistema computarizado haciendo que el brazo articulado (4) vuelva a recorrer los movimientos memorizados en las etapas b) y c) .
9. Procedimiento para mover contenedores para residuos y para vaciar su contenido según la reivindicación 8, caracterizado porque las etapas h) e i) se llevan a cabo automáticamente por dicho sistema computarizado haciendo que el brazo articulado vuelva a recorrer los movimientos memorizados en las etapas b) , c) modificados con un coeficiente de corrección para evitar interferencias.
10. Procedimiento para mover contenedores para residuos y para vaciar su contenido según cualquiera de las reivindicaciones anteriores, caracterizado porque la etapa b) destinada a mover el brazo articulado (4) para aproximar dicho elemento de enganche a una distancia predeterminada D1 respecto al contenedor que va a vaciarse, se controla y se lleva a cabo por el operario, mediante un mando servoasistido.
11. Aparato (100) para mover contenedores para residuos y para vaciar su contenido, caracterizado porque comprende:
-un vehículo automóvil (2) que comprende al menos un cuerpo de almacenamiento de residuos (3) ;
-al menos un brazo articulado (4) llevado por dicho vehículo automóvil (2) ;
-al menos un elemento de enganche (5) , dispuesto en un extremo de dicho brazo articulado (4) ; comprendiendo dicho brazo articulado:
-unos primeros medios (7) para soportar el elemento de enganche (5) ;
-unos segundos medios (8) para la traslación vertical de al menos dichos primeros medios (7) , definiendo un eje de extensión longitudinal (X-X) ;
-unos terceros medios (9) para el alojamiento de dichos segundos medios (8) ;
-unos cuartos medios (10) para producir la rotación de dichos terceros medios (9) en un plano vertical;
-dichos segundos medios (8) están acoplados de modo desplazable a dichos terceros medios (9) , de modo que dichos segundos medios (8) estén en condiciones de adoptar, respecto a dichos terceros medios (9) , al menos:
-una primera posición en la que una parte sustancial de dichos segundos medios (8) está alojada, al menos parcialmente, en el interior de dichos terceros medios (9) ; y
-una segunda posición en la que una parte sustancial de dichos segundos medios (8) sobresale respecto a dichos terceros medios (9) ;
-dichos primeros medios (7) están montados para que giren respecto a un eje ortogonal al eje de extensión longitudinal (X-X) de dichos segundos medios (8) ,
caracterizado porque comprende:
- al menos un sistema (6) computarizado para mover dicho brazo articulado (4) .
12. Aparato (100) para mover contenedores para residuos y para vaciar su contenido según la reivindicación 11, caracterizado porque comprende un sistema óptico para detectar el posicionamiento del elemento de enganche (5) y del contenedor (16) y para transmitir al sistema computarizado las informaciones adecuadas para calcular los movimientos que debe realizar el brazo articulado (4) para situar dicho elemento de enganche sobre el contenedor.
13. Aparato (100) para mover contenedores para residuos y para vaciar su contenido según la reivindicación 12, caracterizado porque dicho sistema óptico comprende al menos una primera cámara para detectar el posicionamiento del elemento de enganche (5) y del contenedor (16) .
14. Aparato (100) para mover contenedores para residuos y para vaciar su contenido según la reivindicación 12, caracterizado porque el sistema óptico comprende al menos una segunda cámara (17) y una pantalla para 10 monitorizar el recorrido del contenedor (16) durante las operaciones de movimiento y vaciado del propio contenedor.
15. Aparato (100) para mover contenedores para residuos y para vaciar su contenido según cualquiera de las reivindicaciones 11 a 14, caracterizado porque comprende un sensor de reconocimiento del contenedor (16) .
16. Aparato (100) para mover contenedores para residuos y para vaciar su contenido según cualquiera de las reivindicaciones 11 a 15, caracterizado porque dicho brazo articulado (4) comprende unos quintos medios (11) de
soporte de dichos primeros medios (7) , con punto de apoyo en dichos segundos medios (8) para girar con respecto a un eje ortogonal al eje de extensión longitudinal (X-X) de dichos segundos medios (8) .
Patentes similares o relacionadas:
Camión de recogida para el vaciado de contenedores de recogida de residuos, del 15 de Julio de 2020, de ROS ROCA, S.A.: Camión de recogida para el vaciado de contenedores de recogida de residuos , que comprende una cubeta de recogida y medios mecánicos […]
CONTENEDOR DE RESIDUOS CON DISPOSITIVO DE CONTROL DE ACCESO, del 8 de Agosto de 2019, de ROS ROCA, S.A.U: 1. Contenedor de residuos con dispositivo de control de acceso, comprendiendo: un cuerpo de contenedor que define un depósito principal para contener residuos y […]
CONTENEDOR DE RESIDUOS CON CONTROL DE ACCESO, del 8 de Agosto de 2019, de ROS ROCA, S.A.U: 1. Contenedor de residuos con control de acceso, comprendiendo: un cuerpo de contenedor que define un depósito principal para contener residuos […]
GRUA ELECTRICA PORTANTE PARA MOVIMIENTO DE CARGAS Y RECIPIENTES CONTENEDORES DE COGIDA VERTICAL Y VACIADO SIN VOLTEO, del 2 de Mayo de 2019, de PÉREZ VERA, Aquilino: Grúa eléctrica portante para movimiento de cargas y recipientes contenedores de cogida vertical y vaciado sin volteo, para su integración en el conjunto del vehículo, […]
Dispositivo de retención de contenedores, del 24 de Abril de 2019, de ZOLLER-KIPPER GMBH: Dispositivo para retener contenedores, de diferente tamaño y forma que se han de vaciar, durante el vuelco hacia la abertura de vertido de un contenedor […]
Grúa eléctrica portante para movimiento de cargas y recipientes contenedores de cogida vertical y vaciado sin volteo., del 28 de Marzo de 2018, de PÉREZ VERA, Aquilino: Grúa eléctrica portante para movimiento de cargas y recipientes contenedores de cogida vertical y vaciado sin volteo, para su integración en el […]
Vehículo de recogida de residuos con elevador de contenedores mejorado, del 10 de Enero de 2018, de PB Environnement: Elevador de contenedores para volquete de recogida de residuos de carga trasera, que comprende: - al menos un brazo principal destinado […]
Mecanismo de elevación para un sistema de carga para vaciar contenedores, del 16 de Agosto de 2017, de TERBERG MACHINES B.V.: Sistema de carga para vaciar contenedores , comprendiendo el sistema de carga montantes verticales y un mecanismo de elevación que […]