Método y sistema para juzgar si un elemento esférico bota dentro o fuera de unas zonas de juego.
Método y sistema para juzgar si un elemento esférico bota dentro o fuera de unas zonas de juego.
El método comprende:
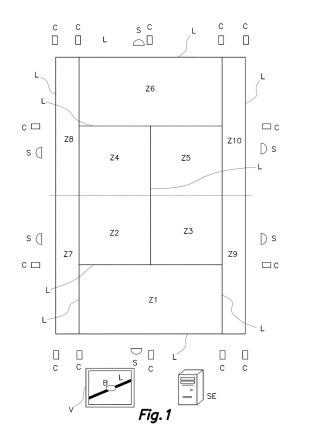
a) adquirir unas imágenes de un área de vigilancia de un campo de juego que cubre como mínimo parte de una línea perimetral (L) delimitadora de una zona de juego (Z1-Z10);
b) realizar una detección aproximada de un bote de un elemento esférico sobre o próximo a una línea perimetral (L), con un sistema de detección y reconocimiento de objetos que permite discernir cuándo el objeto detectado es realmente un elemento esférico;
c) seleccionar automáticamente una de las imágenes adquiridas para el mismo punto temporal y que incluye el área donde se ha producido dicho bote; y
d) analizar la imagen seleccionada para comprobar si el elemento esférico ha votado o no sobre la línea perimetral (L).
El sistema está adaptado para implementar el método de la invención.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330546.
Solicitante: FOXTENN BGREEN, S.L.
Nacionalidad solicitante: España.
Inventor/es: SIMÓN VILAR,Javier.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A63B71/06 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63B MATERIAL PARA LA EDUCACION FISICA, GIMNASIA, NATACION, ESCALADA O ESGRIMA; JUEGOS DE PELOTA; MATERIAL DE ENTRENAMIENTO (aparatos para gimnasia pasiva, masaje A61H). › A63B 71/00 Accesorios para juegos o deportes no incluidos en los grupos A63B 1/00 - A63B 69/00 (accesorios para dar salida A63K 3/02). › Dispositivos indicadores o para señalar el tanteo, para juegos o jugadores.
- G06T7/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
Fragmento de la descripción:
Método y sistema para juzgar si un elemento esférico bota dentro o fuera de unas zonas de juego Sector de la técnica La presente invención concierne en general, en un primer aspecto, a un método para juzgar si un elemento esférico bota dentro o fuera de unas zonas de juego, mediante la realización de una detección aproximada y una más afinada que comprende la selección automática, en respuesta a la detección aproximada, de una o más imágenes de supervisión, y más particularmente a un método donde la detección aproximada se lleva a cabo mediante un sistema que permite discernir cuándo el objeto detectado es realmente un elemento esférico.
Un segundo aspecto de la invención concierne a un sistema apto para implementar el método del primer aspecto.
La invención se aplica con preferencia a un partido de tenis, donde las zonas de juego son las diferentes áreas rectangulares de una pista de tenis, el elemento esférico es una pelota de tenis, y según el reglamento se considera que ésta bota dentro de la zona de juego si toca alguna de las líneas perimetrales que la delimita.
Estado de la técnica anterior
A la hora de jugar al tenis, muchas pelotas botan tan rápidamente en las líneas que delimitan las diferentes zonas de juego de la pista, es decir el “dentro o fuera” de la pista o del área de saque, que el ojo humano no es capaz de seguirlas y no dejan huella, lo cual se convierte en una fuente de problemas.
Existen numerosas propuestas cuyo fin es el de juzgar si un elemento esférico, en particular una pelota de tenis, ha botado dentro o fuera de una zona de juego.
La propuesta más conocida, debido a la adopción de su uso en partidos de tenis reglamentarios, es la implementada por el sistema conocido como “ojo de halcón”, en el cual se reproduce simuladamente la trayectoria de la pelota captada por cámaras de alta velocidad de alto coste, y permite ver si la bola es “in” (dentro) o “out, ” (fuera) en teoría con una precisión de 3 mm.
Este sistema presenta muchos inconvenientes: es muy caro (16 cámaras de altísimo coste) , requiere de terceras personas que viendo las imágenes seleccionen las imágenes correctas, y además en la simulación de trayectoria se estima un error de 3 mm, el cual mucha gente considera que en realidad es superior a dicho valor. El jugador no ve ninguna realidad, es una "acto de fe", ya que las imágenes son simuladas.
También existen propuestas en las que las imágenes a analizar no son simuladas, sino reales. A continuación se citan algunos documentos de patente relativos a tales propuestas.
La patente US8199199B1 propone un método y un sistema que registra, en tiempo real, la posición de una pelota de tenis en relación a unas líneas delimitadoras de unas zonas de juego de una pista de tenis, y que comprende capturar unas imágenes de la pista mediante como mínimo una videocámara sensible a la luz cercana al infrarrojo, así como emitir sobre la pista luz cercana al infrarrojo desde una fuente de luz que se desplaza en relación a la videocámara, con el fin de realizar un seguimiento de la trayectoria de la pelota y de su sombra, determinar un punto de intersección entre ambas y compararlo con líneas delimitadoras de la pista previamente calibradas, para juzgar si la misma ha botado dentro o fuera de la zona de juego.
El sistema propuesto en dicha patente es harto complejo, ya que necesitan realizar una detección y seguimiento de dos elementos en movimiento, la pelota y su sombra, y aunque proponen realizar un filtrado de las imágenes capturadas para evitar confundir a dichos dos elementos con otros elementos móviles incluidos en el campo de visión de la videocámara, el resultado de tal filtrado es dudoso, sobre todo por lo que se refiere a las sombras de otros objetos que interfieran con la sombra de la pelota.
Asimismo, la eficiencia de la implementación de tal sistema es también muy dudosa, ya que, sobre todo por lo que se refiere a la sombra de la pelota, ésta variará en función de los puntos donde se sitúe la videocámara, o videocámaras, y la fuente de luz, y con el fin de apreciarla con claridad la videocámara debe estar situada a una cierta altura, lo que hace que no pueda asegurarse que en el punto de intersección de la pelota y su sombra la pelota haya contactado realmente con la pista o, aunque lo haya hecho, en qué punto preciso de la pista ha contactado.
Por la solicitud Internacional WO2007098537A1 se conoce un método y un sistema que reúnen, respectivamente, las características del preámbulo de las reivindicaciones independientes 1 y 13 de la presente invención. El método y el sistema propuestos en WO2007098537A1 tienen como fin el de determinar parámetros de un contacto entre cuerpos, tal como el bote de un elemento esférico con una pista de juego, y para ello realizan una detección aproximada consistente en la detección de una emisión de infrarrojos localizada producida por el calor generado debido a la fricción asociada al contacto entre los cuerpos o a la deformación de uno de los cuerpos, y una selección automática y posterior visualización de una imagen o imágenes asociada a dicha detección aproximada y que incluyen información de la escena donde se ha producido el posible contacto, en el campo de los infrarrojos y con preferencia también en el campo visible, para permitir una inspección visual que determine, por ejemplo, si el elemento esférico ha botado dentro o fuera de una zona de juego.
El sistema utilizado para realizar la mencionada detección aproximada en WO2007098537A1, es decir la detección de emisiones de infrarrojos, es muy ineficaz, ya que las emisiones de infrarrojos pueden producirse por diversas causas indeseadas no asociadas al contacto entre los cuerpos de interés, es decir no asociadas, por ejemplo, al contacto entre el elemento esférico y la pista de juego. Tales causas pueden ser muy diversas, yendo desde el contacto provocado por un cuerpo que no sea de interés, tal como una hoja que caiga sobre la pista de juego o el propio jugador que se desplaza por la misma, hasta bruscas variaciones de temperatura de la zona de interés, por ejemplo por la inclusión de áreas de sol y sombra en la misma, o por ser la pista de tenis una pista de exterior sometida a altas temperaturas.
Explicación de la invención Resulta necesario ofrecer una alternativa al estado de la técnica que permita cubrir las lagunas halladas en el mismo, y que, en particular, ofrezca unas prestaciones y una eficiencia, en cuanto al porcentaje de aciertos, claramente superiores a las conseguidas con el método y el sistema propuestos en WO2007098537A1.
Con tal fin, la presente invención concierne, en un primer aspecto, a un método para juzgar si un elemento esférico bota dentro o fuera de unas zonas de juego, donde dichas zonas de juego están delimitadas por unas líneas perimetrales y forman un campo de juego, donde el método comprende:
a) adquirir una secuencia de imágenes de al menos un área de vigilancia de dicho campo de juego que cubre a al menos parte de al menos una de dichas líneas perimetrales, en general de una o más áreas de vigilancia que, en su conjunto, cubren todas las líneas perimetrales de las zonas de juego;
b) realizar una detección aproximada de un bote de un elemento esférico sobre una de dichas líneas perimetrales o próximo a la misma;
c) seleccionar automáticamente, en respuesta a dicha detección aproximada, al menos una imagen de dicha secuencia de imágenes adquirida para el mismo punto temporal y que incluye el área donde se ha producido dicho bote; y
d) analizar dicha imagen seleccionada, que es al menos una, para comprobar si el elemento esférico ha botado realmente o no sobre la línea perimetral, con el fin de juzgar si el elemento esférico ha botado dentro o fuera de la zona de juego delimitada por dicha línea perimetral de la etapa b) .
A diferencia de las propuestas conocidas, el método propuesto por el primer aspecto de la presente invención comprende, de manera característica, realizar la mencionada detección aproximada con un sistema de detección y reconocimiento de objetos que permite discernir de manera automática cuándo el objeto detectado es realmente un elemento esférico.
Para un ejemplo de realización preferido, el método comprende utilizar como sistema de detección y reconocimiento un sistema de escáner láser, tal como un sistema LIDAR (acrónimo del inglés “Light Detection and Ranging“o “Laser Imaging Detection and Ranging”) que incluye uno o varios escáneres láser.
En función del ejemplo de realización, la mencionada detección aproximada de la etapa b) comprende...
Reivindicaciones:
1. Método para juzgar si un elemento esférico bota dentro o fuera de unas zonas de juego, donde dichas zonas de juego (Z1-Z10) están delimitadas por unas líneas perimetrales (L) y forman un campo de juego, donde el método comprende:
a) adquirir una secuencia de imágenes de al menos un área de vigilancia de dicho campo de juego que cubre a al menos parte de al menos una de dichas líneas perimetrales (L) ;
b) realizar una detección aproximada de un bote de un elemento esférico sobre una de dichas líneas perimetrales (L) o próximo a la misma;
c) seleccionar automáticamente, en respuesta a dicha detección aproximada, al menos una imagen de dicha secuencia de imágenes adquirida para el mismo punto temporal y que incluye el área donde se ha producido dicho bote; y
d) analizar dicha imagen seleccionada, que es al menos una, para comprobar si el elemento esférico ha botado realmente o no sobre la línea perimetral (L) , con el fin de juzgar si el elemento esférico ha botado dentro o fuera de la zona de juego delimitada por dicha línea perimetral (L) de la etapa b) ;
estando el método caracterizado porque comprende realizar dicha detección aproximada con un sistema de detección y reconocimiento de objetos que permite discernir de manera automática cuándo el objeto detectado es realmente un elemento esférico.
2. Método según la reivindicación 1, caracterizado porque dicha detección aproximada de la etapa b) comprende realizar al menos dos detecciones que incluyen al menos un momento en que se produce dicho bote y/o al menos un momento inmediatamente anterior al bote y/o al menos un momento inmediatamente posterior al bote, utilizándose en dicha etapa c) como punto temporal para la selección automática de dicha imagen, que es al menos una, al menos uno de los puntos temporales de dichas detecciones, que son al menos dos.
3. Método según la reivindicación 2, caracterizado porque comprende, de manera previa a dicha detección aproximada y a mayor altura que la misma, realizar una pre-detección del paso del elemento esférico por al menos dos puntos situados a distinta altura, y realizar, en base a dicha pre-detección, una predicción de la trayectoria a seguir por el elemento esférico hacia el suelo y una predeterminación de una zona aproximada donde se producirá el bote.
4. Método según la reivindicación 3, caracterizado porque comprende llevar a cabo dicha pre-detección utilizando al menos dos dispositivos de detección de dicho sistema de detección y reconocimiento de objetos situados en dichos dos puntos a distinta altura.
5. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque dicha etapa d) comprende mostrar dicha imagen seleccionada, que es al menos una, en unos medios de visualización para permitir realizar dicho análisis de la misma juzgándola visualmente o como complemento a dicho análisis.
6. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque dicho análisis de la etapa d) es un análisis automático.
7. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende utilizar como sistema de detección y reconocimiento un sistema de escáner láser (S) .
8. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende iniciar dicha etapa d) bajo petición de un jugador o juez.
9. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende iniciar dicha etapa d) automáticamente tras la selección de la etapa c) .
10. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque dicha etapa c) comprende la selección de una pluralidad de imágenes, ordenadas en secuencia, que incluyen a dicha imagen adquirida para el mismo punto temporal de la detección aproximada e imágenes para puntos temporales previos y posteriores al mismo.
11. Método según la reivindicación 10, caracterizado porque dicha etapa d) comprende la reproducción de un vídeo que incluye a dicha pluralidad de imágenes, en cámara lenta, hacia delante y/o atrás y/o deteniéndolo con el fin de realizar dicho juicio visual.
12. Método según una cualquiera de las reivindicaciones anteriores cuando dependen de la 5, caracterizado porque dicha etapa d) comprende mostrar una zona de interés ampliada de la imagen o imágenes seleccionadas centrada en el área del bote del elemento esférico.
13. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende llevar a cabo dicha etapa a) mediante una pluralidad de cámaras de alta velocidad (C) cubriendo los diferentes tramos de líneas perimetrales (L) desde ambos lados de las mismas.
14. Método según la reivindicación 13 cuando depende de la 3, caracterizado porque comprende utilizar dicha predefinición de dicha zona aproximada donde se producirá el bote para activar y/o controlar al menos una de dichas cámaras de alta velocidad cuya área de cobertura incluye a dicha zona aproximada predefinida.
15. Método según la reivindicación 10 cuando depende de la 6, caracterizado porque dicho análisis automático es relativo a dicha pluralidad de imágenes seleccionadas e incluye al menos la elección de la imagen en la cual el elemento esférico aparece más deformado contactando con el suelo y el posterior análisis automático de la misma y/o su exposición en dichos medios de visualización.
16. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende discernir de manera automática cuándo el objeto detectado es realmente un elemento esférico por la diferencia en las señales de detección provocadas al ser detectado por el sistema de detección y reconocimiento en comparación con señales de detección provocadas por la detección de otros elementos, estacionarios o móviles, de al menos forma y dimensiones distintas.
17. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque dicho elemento esférico es una pelota de tenis (B) y dicho campo de juego es una pista de tenis, siendo dichas zonas de juego (Z1-Z10) las diferentes áreas rectangulares de dicha pista de tenis.
18. Sistema para juzgar si un elemento esférico bota dentro o fuera de unas zonas de juego (Z1-Z10) , donde dichas zonas de juego (Z1-Z10) están delimitadas por unas líneas perimetrales (L) y forman un campo de juego, y donde el sistema comprende:
-unos medios de adquisición y registro de imágenes configurados y dispuestos para adquirir y registrar una secuencia de imágenes de al menos un área de vigilancia de dicho campo de juego que cubre a al menos parte de al menos una de dichas líneas perimetrales (L) ;
-unos medios de detección configurados y dispuestos para realizar una detección aproximada de un bote de un elemento esférico sobre una de dichas líneas perimetrales (L) o próximo a la misma;
-unos medios de selección automáticos en conexión con dichos medios de detección, con acceso a dichas imágenes registradas, y configurados para seleccionar automáticamente, en respuesta a dicha detección aproximada, al menos una imagen de dicha secuencia de imágenes adquirida para el mismo punto temporal y que incluye el área donde se ha producido dicho bote; y
-unos medios de visualización (V) y/o análisis configurados para, respectivamente, mostrar dicha imagen seleccionada, que es al menos una, para permitir su análisis juzgándola visualmente, y/o para analizarla automáticamente, para comprobar si el elemento esférico ha botado realmente o no sobre la línea perimetral (L) relativa a la detección aproximada, con el fin de juzgar si el elemento esférico ha botado dentro o fuera de la zona de juego delimitada por dicha línea perimetral (L) ;
estando el sistema caracterizado porque dichos medios de detección comprenden un sistema de detección y reconocimiento de objetos que permite discernir de manera automática cuándo el objeto detectado es realmente un elemento esférico.
19. Sistema según la reivindicación 18, caracterizado porque dicho sistema de detección y reconocimiento incluye al menos un sistema de escáner láser (S) .
20. Sistema según la reivindicación 18 ó 19, caracterizado porque dicho sistema de detección y reconocimiento comprende, con el fin de realizar dicha detección aproximada, al menos un primer dispositivo de detección dispuesto a nivel de suelo o próximo al mismo, con su campo de cobertura incluyendo al menos una porción de la línea perimetral (L) sobre o cerca de la cual se produce dicho bote.
21. Sistema según la reivindicación 20, caracterizado porque dicho sistema de detección y reconocimiento comprende al menos un segundo y un tercero dispositivos de detección situados en dos respectivos puntos a distinta altura, ambos a mayor altura que dicho primer dispositivo de detección, dispuestos y configurados para detectar el paso de un elemento móvil por al menos dichos dos puntos, estando el sistema de detección y reconocimiento configurado para realizar, en base a dicha detección del paso por dichos dos puntos, una predicción de la trayectoria a seguir por el elemento móvil, y para discernir si éste es o no un elemento esférico.
22. Sistema según la reivindicación 21, caracterizado porque el sistema de detección y reconocimiento comprende una pluralidad de dichos primero, segundo y tercero dispositivos de detección dispuestos cubriendo diferentes áreas de, y por encima de, las zonas de juego (Z1-Z10) .
23. Sistema según una cualquiera de las reivindicaciones 18 a 22, caracterizado porque comprende unos medios de control en conexión con dichos medios de selección automáticos y con dichos medios de visualización (V) y/o análisis, para controlar a los últimos para que muestren y/o analicen la imagen seleccionada, que es al menos una.
24. Sistema según una cualquiera de las reivindicaciones 18 a 23, caracterizado porque dichos medios de adquisición y registro de imágenes comprenden una pluralidad de cámaras de alta velocidad (C) dispuestas de manera que sus áreas de cobertura abarquen los diferentes tramos de líneas perimetrales (L) desde ambos lados de las mismas.
25. Sistema según la reivindicación 24, caracterizado porque dichas cámaras de alta velocidad (C) están dispuestas a ras de suelo, o sustancialmente a ras de suelo.
1.
26. Sistema según la reivindicación 24, caracterizado porque al menos una de dichas cámaras de alta velocidad (C) u otra cámara de los medios de adquisición y registro de imágenes es móvil.
27. Sistema según la reivindicación 26, caracterizado porque comprende un robot móvil que porta a dicha cámara móvil, que es al menos una, y que incluye un sistema de supervisión, seguimiento y predicción que lo hace conocedor de las circunstancias del juego, incluyendo la posición en cada momento de los jugadores y del elemento esférico, y que predice, mediante cálculo, dónde va a botar el elemento esférico, siendo el robot apto para, en base a dicho conocimiento y predicción, buscar el mejor ángulo de captación de la cámara móvil y desplazarse en dirección a la zona donde se prevé que bote el elemento esférico.
Patentes similares o relacionadas:
Dispositivo para mejorar la ventilación nasal, del 22 de Julio de 2020, de Milesi, Mario: Dispositivo para mejorar la ventilación nasal, que comprende primeros medios adecuados para recoger un flujo de aire emitido por […]
Sistemas y dispositivos de entrenamiento de tiro a puerta tejidos, del 1 de Julio de 2020, de Siefker, Aaron Glenn: Un dispositivo de entrenamiento de tiro a puerta que comprende: una cubierta de entrenamiento sustancialmente cruciforme que tiene […]
Entrenador de bicicletas, del 1 de Julio de 2020, de SBI Media Holding SA: Entrenador de bicicleta para montar una bicicleta que tiene un cuadro y una rueda posterior unidas a un eje posterior, comprendiendo el entrenador de bicicleta: […]
Seguimiento de posición en eventos deportivos, del 3 de Junio de 2020, de race result AG: Transpondedor móvil para el cronometraje y el seguimiento de ubicación, con: una unidad de recepción para recibir un mensaje […]
Un dispositivo de ejercicios y un procedimiento de ejercicios mediante el uso de dicho dispositivo, del 20 de Mayo de 2020, de Fitness Engineers Pty Ltd: Un dispositivo de ejercicios que tiene: una base ; una pared extensible lejos de dicha base hasta un cierre ; […]
Dispositivo de protección para uso en escalada, del 6 de Mayo de 2020, de DMM International Ltd: Un método para fabricar un elemento de leva para un dispositivo de levas que comprende formar un cuerpo, aplicar durante la fabricación […]
Sistema para monitorizar el rendimiento en el baloncesto, del 6 de Mayo de 2020, de Shooter's Touch, LLC: Sistema para monitorizar el rendimiento en el baloncesto que comprende: un microprocesador local en comunicación con un sistema computacional remoto ; un […]
Artículos inflables que proporcionan un inflado y un control de presión de larga duración, del 22 de Abril de 2020, de Russell Brands, LLC: Un método para inflar un balón deportivo con un gas compresible, comprendiendo el método las etapas de: a. desinflar parcialmente dicho balón deportivo, […]