Método y aparato para transferir jeringuillas.
Método para transferir una pluralidad de receptáculos (1) tubulares hechos de un material frágil,
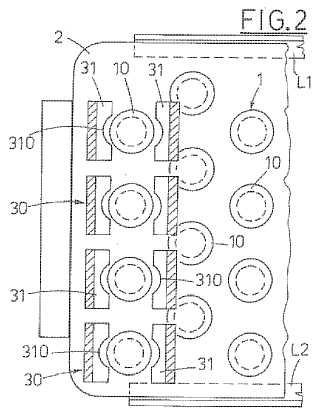
adecuadospara contener dosis de sustancias médicas, desde recipientes (2, 20), en los que los receptáculos (1)pueden alojarse por separado, a una máquina (M) de envasado para procesar los receptáculos (1),alojando cada recipiente (2, 20) una multiplicidad de receptáculos (1) y pudiendo transportarse por una cinta(L) transportadora hacia la máquina (M) de envasado, en el que los receptáculos son cilindros (1) parajeringuillas, adecuados para contener un líquido que va a inyectarse, comprendiendo cada uno de loscilindros (1) un cuello (10) de soporte superior, formado en un reborde de una respectiva boca, y teniendoun lado (11) inferior que se opone a la boca, en el que cada recipiente comprende un nido (2) para cilindros(1), comprendiendo el nido (2) a su vez una pluralidad de alojamientos (21) separados, comprendiendocada alojamiento (21) una cavidad pasante vertical para alojar verticalmente un respectivo cilindro (1) quedescansa en un borde superior de la cavidad mediante el cuello (10) de soporte del mismo, y sobresaliendoel respectivo lado (11) inferior por debajo del nido (2), en el que los alojamientos (21) y por tanto loscilindros (1) alojados en los mismos están dispuestos en los nidos (2) en líneas paralelas, y los nidos (2) sesuministran desde la cinta (L) transportadora en una línea hasta una posición (P) de recogida en lasproximidades de la entrada (I) de la máquina (M) de envasado, en la que los nidos (2) de la línea sedetienen durante las operaciones de recogida, comprendiendo el método las siguientes etapas:a. coger una pluralidad de cilindros (1) de un nido (2), manteniendo los cilindros (1) separados entre sí,
b. disponer los cilindros (1) cogidos en una entrada (I) de la máquina (M) de envasado, en una formaciónpredefinida en la que se mantienen separados entre sí, y
c. poner los cilindros (1), cogidos y dispuestos en las etapas anteriores, dentro de la máquina (M) deenvasado, manteniéndolos separados entre sí, mediante lo cual la máquina (M) de envasado puederecibirlos, una vez que han entrado en la misma, para procesarlos, en el que las etapas a, b y c serealizan respectivamente mediante las etapas a', b', c' tal como sigue:
a'. una pluralidad de cilindros (1) reciben un empuje dirigido hacia arriba aplicado al lado (11) inferior delos mismos, empuje que hace que una respectiva parte (101) superior que comprende el cuello (10) desoporte sobresalga por encima del alojamiento (21) relativo y por tanto el nido (2); tras lo cual, se recogecada uno de los cilindros (1) empujados hacia arriba por la parte (101) superior sobresaliente de losmismos y luego se retira del alojamiento (21), y por tanto se retira del nido (2) mientras se mantieneseparado de los otros cilindros (1) que se han recogido;
b'. los cilindros (1) que se han recogido se ponen en la entrada (I) de la máquina (M) de envasado y sedisponen en una línea, separados entre sí, constituyendo la línea la formación predefinida, y
c'. la línea de cilindros (1) se traslada longitudinalmente para poner los cilindros (1) de uno en uno dentrode la máquina (M) de envasado, manteniendo los cilindros (1) separados entre sí durante la traslación, yen el que la etapa a' se lleva a cabo aplicándola a los cilindros (1) de una línea entera de alojamientos(21) del nido (2) que está en la posición (P) de recogida;
durante la etapa b', la línea de cilindros (1) recogidos durante la etapa a' se dispone con todos los cilindros(1) mantenidos verticalmente de manera que el cuello (10) de soporte y la boca estén dispuestos arriba y ellado (11) inferior abajo, en dicha línea en la entrada (I) de la máquina (M) de envasado, después de lo cualse lleva a cabo la etapa c';
las etapas a', b' y c' se repiten aplicándolas de manera cíclica a cada una de las líneas paralelas decilindros (1) alojados en los nidos (2) y se llevan a cabo de manera que la etapa c' tenga una duración quees como máximo igual a una suma de duraciones de la etapa a' y la etapa b', de manera que la etapa c' deun ciclo en relación con una línea de cilindros (1) pueda completarse durante las etapas a' y b' aplicadas auna línea adicional de cilindros (1) en el siguiente ciclo; y
después de que se han retirado todos los cilindros (1) que se alojaron en el nido (2) presente en la posición(P) de recogida, se retira el nido (2) de la cinta (L) transportadora, que hace avanzar un nido (2) adicionalhasta la posición (P) de recogida y se repiten las etapas del método desde el comienzo mientras sesuministren nidos (2) que contienen cilindros (1) que van a recogerse.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11184785.
Solicitante: MARCHESINI GROUP S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIA NAZIONALE, 100 40065 PIANORO (BOLOGNA) ITALIA.
Inventor/es: MONTI, GIUSEPPE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61M5/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61M DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO (introducción de remedios en o sobre el cuerpo de animales A61D 7/00; medios para la inserción de tampones A61F 13/26; dispositivos para la administración vía oral de alimentos o medicinas A61J; recipientes para la recogida, almacenamiento o administración de sangre o de fluidos médicos A61J 1/05 ); DISPOSITIVOS PARA HACER CIRCULAR LOS AGENTES POR EL CUERPO O PARA SU EXTRACCION (cirugía A61B; aspectos químicos de los artículos quirúrgicos A61L; magnetoterapia utilizando elementos magnéticos colocados dentro del cuerpo A61N 2/10 ); DISPOSITIVOS PARA INDUCIR UN ESTADO DE SUEÑO O LETARGIA O PARA PONERLE FIN. › Dispositivos para introducir agentes en el cuerpo vía subcutánea, intravenosa o intramuscular; Accesorios correspondientes, p. ej. dispositivos de llenado o de limpieza, reposa-brazos (conectores o acoplamientos para tubos, válvulas o conjuntos de derivación, especialmente concebidos para uso médico A61M 39/00; recipientes especialmente adaptados para fines médicos o farmacéuticos A61J 1/00).
- B65B5/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 5/00 Embalaje de objetos individuales en receptáculo o recipientes, p. ej. sacos, bolsas, cajas, cartones, latas, tarros. › Embalaje de grupos de objetos, siendo cada grupo sujetado o guiado individualmente para ser transferido al receptáculo o recipiente.
- B65G47/90 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
PDF original: ES-2411004_T3.pdf
Fragmento de la descripción:
Método y aparato para transferir jeringuillas
Sector de la técnica La presente invención se refiere a métodos y a un aparato para transferir artículos frágiles desde una línea de suministro y alimentarlos a una máquina para procesar los objetos.
En particular, la invención se refiere a métodos y a un aparato usados para transferir, para envasar, viales o cilindros de jeringuillas, tubos u otros receptáculos pequeños hechos de material frágil, tal como vidrio, y particularmente diseñados para contener líquidos u otras sustancias sueltas.
Estado de la técnica A continuación, para facilitar la descripción, se hará referencia, meramente a modo de ejemplo, al problema de transferir cilindros de vidrio, que constituyen el cuerpo tubular bastante conocido de las jeringuillas, para contener un líquido que va a inyectarse desde una línea de suministro a una máquina de envasado que los procesa para envasar las jeringuillas relativas (tal como por ejemplo una máquina de inserción de pistones y una máquina de etiquetado) .
Los cilindros, por ejemplo, ya llenados y sellados con tapas de caucho, habitualmente conocidos como “tapones de caucho”, insertados en la boca superior de los mismos, llegan a la máquina de envasado alojados en un recipiente especial transportado por la cinta transportadora.
Hay dos tipos de recipiente principales, bastante conocidos en el campo, que están diseñados para albergar cilindros de vidrio tubulares.
El primer tipo consiste en el denominado “nido”, denominado así porque parecen avisperos, que tienen forma de retícula y pueden alojar una pluralidad de cilindros de vidrio verticales, estando cada uno dentro de una respectiva “celda”, o alojamiento, que comprende una cavidad pasante y vertical.
En detalle, las celdas, y los cilindros alojados en las mismas, están dispuestas en el nido y separadas a lo largo de líneas paralelas.
En la práctica, cuando están alojados en el nido, los cilindros no entran en contacto entre sí, y descansan sobre el borde de la cavidad del alojamiento relativo por medio de un cuello de soporte pequeño conformado desde el borde de la boca de los mismos, diseñado para albergar el émbolo de la futura jeringuilla cuando se termina.
Los lados inferiores de los cilindros sobresalen por debajo de la celda y el nido.
El otro tipo conocido de recipiente está constituido por bandejas en las que cada cuerpo está alojado horizontalmente en un respectivo asiento conformado, por ejemplo, como impresión complementaria del propio cuerpo, que es accesible por arriba.
En este caso también, los asientos están dispuestos en la bandeja de modo que los cilindros se alojen en varias filas paralelas y no entren en contacto entre sí.
A continuación, se explica el proceso conocido para transferir los cilindros del recipiente a la máquina de envasado.
Una pluralidad de cilindros que van a transferirse, a través de diversos dispositivos conocidos en el campo, se retiran simultáneamente del recipiente en el que están alojados.
Esto es así porque es evidente que coger sólo un cuerpo cada vez tendría obviamente un efecto perjudicial sobre el rendimiento, provocando un denominado “cuello de botella” en la cadena de recepción, embalaje y envasado de las jeringuillas.
Posteriormente, los cilindros se disponen en una guía de envío ubicada en la entrada de la máquina de envasado para suministrar a la máquina, guía que está configurada de manera que los cilindros se desplacen al interior de la máquina de envasado en fila india en contacto entre sí.
De hecho, los cilindros deben suministrarse a la máquina de envasado dispuestos en una formación predefinida y luego se dirigen apropiadamente.
Normalmente, la guía está compuesta por dos vías de alambre en las que se deslizan los cilindros, descansando sobre los cuellos de soporte de los mismos, tal como se describió anteriormente.
La experiencia de usar este procedimiento y su medio de implementación ha sacado a la luz el inconveniente que se describe a continuación.
Una vez que se han tomado los cilindros del nido, o alternativamente de la bandeja, y se han insertado en la guía, a menudo colisionan entre sí durante su envío a la máquina de envasado.
Puesto que los cilindros de jeringuilla están hechos de un material frágil, los impactos son a menudo la causa de grietas y/o roturas, si es que no se destrozan.
Esto provoca un bajo rendimiento y costes altos.
El documento EP 2.196.395 da a conocer un dispositivo y un método para embalar jeringuillas anidadas según una solución de la técnica anterior.
Objeto de la invención El objetivo de la presente invención es obviar el inconveniente descrito anteriormente y otros por medio de:
un método, según la reivindicación 1, y un aparato para realizar este método según la reivindicación 5, para transferir una pluralidad de receptáculos tubulares hechos de un material frágil, adecuados para contener dosis de sustancias médicas, por ejemplo cilindros para jeringuillas o viales, desde recipientes en los que los receptáculos pueden alojarse por separado, a una máquina de envasado para procesar los receptáculos (1) , en el que cada recipiente comprende un nido para cilindros, comprendiendo el nido a su vez una pluralidad de alojamientos separados, comprendiendo cada alojamiento una cavidad pasante vertical para alojar verticalmente un respectivo cilindro que descansa sobre un borde superior de la cavidad mediante el cuello de soporte del mismo, y sobresaliendo el respectivo lado inferior por debajo del nido y
un método, según la reivindicación 2, y un aparato para realizar el método, según la reivindicación 6, para transferir una pluralidad de receptáculos tubulares hechos de un material frágil, adecuados para contener dosis de sustancias médicas, por ejemplo cilindros para jeringuillas o viales, desde recipientes en los que los receptáculos pueden alojarse por separado, a una máquina de envasado para procesar los receptáculos, en el que cada recipiente comprende una bandeja (20) que comprende a su vez una pluralidad de alojamientos (201) que son abiertos, accesibles por arriba y adecuados para alojar individualmente respectivos receptáculos (1) dispuestos horizontalmente, de manera que los receptáculos (1) estén separados entre sí.
El método, tanto en el caso de los nidos como el de las bandejas, comprende las siguientes etapas:
a. coger una pluralidad de receptáculos de un recipiente, manteniendo los receptáculos separados entre sí,
b. disponer los receptáculos cogidos en una entrada de la máquina de envasado, en una formación predefinida en la que se mantienen separados entre sí, y
c. poner los receptáculos, cogidos y dispuestos en las etapas anteriores, dentro de la máquina de envasado, manteniéndolos separados entre sí, mediante lo cual la máquina de envasado puede recibirlos, una vez que han entrado en la misma, para procesarlos.
El aparato, tanto en el caso de los nidos como el de las bandejas, comprende:
al menos un medio de recogida para recoger una pluralidad de receptáculos cada vez de un recipiente y soltar los receptáculos, una vez recogidos;
al menos un dispositivo de inserción previsto en la entrada de la máquina de envasado, para poner los receptáculos extraídos del recipiente en la entrada de la máquina de envasado, donde se cogen, y
un medio de desplazamiento para soportar el medio de recogida y desplazarlo, una vez que ha recogido los receptáculos, de modo que los receptáculos recogidos se extraigan del recipiente y luego se lleven al dispositivo de inserción.
Además, en el aparato según la invención, tanto en el caso de los nidos como el de las bandejas, se prevé que:
el dispositivo de inserción comprenda una pluralidad de asientos móviles dispuestos separados entre sí, siendo cada uno adecuado para alojar un receptáculo, de tal manera que los receptáculos alojados se dispongan en una configuración predefinida en la que están separados entre sí, pudiendo activarse además el dispositivo de inserción
para mover los asientos móviles, con los receptáculos alojados en los mismos, de manera que los receptáculos se pongan en la entrada de la máquina de envasado;
el medio de recogida está configurado para mantener los receptáculos separados mientras que se recogen y una vez que se recogen; y porque el medio (4) de desplazamiento puede activarse para desplazar el medio de recogida, una vez que ha recogido los receptáculos, hasta el dispositivo de inserción, y moverlo de manera que los receptáculos se... [Seguir leyendo]
Reivindicaciones:
1. Método para transferir una pluralidad de receptáculos (1) tubulares hechos de un material frágil, adecuados
5 para contener dosis de sustancias médicas, desde recipientes (2, 20) , en los que los receptáculos (1) pueden alojarse por separado, a una máquina (M) de envasado para procesar los receptáculos (1) ,
alojando cada recipiente (2, 20) una multiplicidad de receptáculos (1) y pudiendo transportarse por una cinta
(L) transportadora hacia la máquina (M) de envasado, en el que los receptáculos son cilindros (1) para
jeringuillas, adecuados para contener un líquido que va a inyectarse, comprendiendo cada uno de los
cilindros (1) un cuello (10) de soporte superior, formado en un reborde de una respectiva boca, y teniendo
un lado (11) inferior que se opone a la boca, en el que cada recipiente comprende un nido (2) para cilindros
(1) , comprendiendo el nido (2) a su vez una pluralidad de alojamientos (21) separados, comprendiendo
cada alojamiento (21) una cavidad pasante vertical para alojar verticalmente un respectivo cilindro (1) que
descansa en un borde superior de la cavidad mediante el cuello (10) de soporte del mismo, y sobresaliendo
15 el respectivo lado (11) inferior por debajo del nido (2) , en el que los alojamientos (21) y por tanto los cilindros (1) alojados en los mismos están dispuestos en los nidos (2) en líneas paralelas, y los nidos (2) se
suministran desde la cinta (L) transportadora en una línea hasta una posición (P) de recogida en las
proximidades de la entrada (I) de la máquina (M) de envasado, en la que los nidos (2) de la línea se
detienen durante las operaciones de recogida, comprendiendo el método las siguientes etapas:
a. coger una pluralidad de cilindros (1) de un nido (2) , manteniendo los cilindros (1) separados entre sí,
b. disponer los cilindros (1) cogidos en una entrada (I) de la máquina (M) de envasado, en una formación
predefinida en la que se mantienen separados entre sí, y
25 c. poner los cilindros (1) , cogidos y dispuestos en las etapas anteriores, dentro de la máquina (M) de
envasado, manteniéndolos separados entre sí, mediante lo cual la máquina (M) de envasado puede
recibirlos, una vez que han entrado en la misma, para procesarlos, en el que las etapas a, b y c se
realizan respectivamente mediante las etapas a’, b’, c’ tal como sigue:
a’. una pluralidad de cilindros (1) reciben un empuje dirigido hacia arriba aplicado al lado (11) inferior de
los mismos, empuje que hace que una respectiva parte (101) superior que comprende el cuello (10) de
soporte sobresalga por encima del alojamiento (21) relativo y por tanto el nido (2) ; tras lo cual, se recoge
cada uno de los cilindros (1) empujados hacia arriba por la parte (101) superior sobresaliente de los
35 mismos y luego se retira del alojamiento (21) , y por tanto se retira del nido (2) mientras se mantiene separado de los otros cilindros (1) que se han recogido;
b’. los cilindros (1) que se han recogido se ponen en la entrada (I) de la máquina (M) de envasado y se
disponen en una línea, separados entre sí, constituyendo la línea la formación predefinida, y
c’. la línea de cilindros (1) se traslada longitudinalmente para poner los cilindros (1) de uno en uno dentro
de la máquina (M) de envasado, manteniendo los cilindros (1) separados entre sí durante la traslación, y
en el que la etapa a’ se lleva a cabo aplicándola a los cilindros (1) de una línea entera de alojamientos
(21) del nido (2) que está en la posición (P) de recogida;
45 durante la etapa b’, la línea de cilindros (1) recogidos durante la etapa a’ se dispone con todos los cilindros
(1) mantenidos verticalmente de manera que el cuello (10) de soporte y la boca estén dispuestos arriba y el
lado (11) inferior abajo, en dicha línea en la entrada (I) de la máquina (M) de envasado, después de lo cual
se lleva a cabo la etapa c’;
las etapas a’, b’ y c’ se repiten aplicándolas de manera cíclica a cada una de las líneas paralelas de
cilindros (1) alojados en los nidos (2) y se llevan a cabo de manera que la etapa c’ tenga una duración que
es como máximo igual a una suma de duraciones de la etapa a’ y la etapa b’, de manera que la etapa c’ de
un ciclo en relación con una línea de cilindros (1) pueda completarse durante las etapas a’ y b’ aplicadas a
55 una línea adicional de cilindros (1) en el siguiente ciclo; y
después de que se han retirado todos los cilindros (1) que se alojaron en el nido (2) presente en la posición
(P) de recogida, se retira el nido (2) de la cinta (L) transportadora, que hace avanzar un nido (2) adicional
hasta la posición (P) de recogida y se repiten las etapas del método desde el comienzo mientras se
suministren nidos (2) que contienen cilindros (1) que van a recogerse.
2. Método para transferir una pluralidad de receptáculos (1) tubulares hechos de un material frágil, adecuados
para contener dosis de sustancias médicas, por ejemplo cilindros (1) para jeringuillas o viales, desde
recipientes (2, 20) , en los que los receptáculos (1) pueden alojarse por separado, a una máquina (M) de
65 envasado para procesar los receptáculos (1) , alojando cada recipiente (2, 20) una multiplicidad de receptáculos (1) y pudiendo transportarse por una cinta (L) transportadora hacia la máquina (M) de
envasado, en el que cada recipiente comprende una bandeja (20) que comprende a su vez una pluralidad
de alojamientos (201) que son abiertos, accesibles por arriba y adecuados para alojar individualmente respectivos receptáculos (1) dispuestos horizontalmente, de manera que los receptáculos (1) estén separados entre sí, en el que los alojamientos (201) y por tanto los receptáculos (1) alojados en los mismos se disponen en las bandejas en líneas paralelas, y las bandejas (20) se suministran por la cinta (L)
transportadora en una línea hasta una posición (P) de recogida en las proximidades de la entrada (I) de la máquina (M) de envasado, en la que las bandejas (20) de la línea se detienen durante las operaciones de recogida, comprendiendo el método las siguientes etapas:
a. coger una pluralidad de receptáculos (1) de una bandeja (20) , manteniendo los receptáculos (1) separados entre sí,
b. disponer los receptáculos (1) cogidos en una entrada (I) de la máquina (M) de envasado, en una formación predefinida en la que se mantienen separados entre sí, y
c. poner los receptáculos (1) , cogidos y dispuestos en las etapas anteriores, dentro de la máquina (M) de envasado, manteniéndolos separados entre sí, mediante lo cual la máquina (M) de envasado puede recibirlos, una vez que han entrado en la misma, para procesarlos,
en el que las etapas a, b y c se realizan respectivamente mediante las etapas a’, b’ y c’ tal como sigue:
a’. una pluralidad de receptáculos (1) se elevan del respectivo alojamiento (201) hasta que se recogen de la bandeja (20) , de manera que se mantengan separados entre sí,
b’. los receptáculos (1) recogidos se llevan luego a la entrada (I) de la máquina (M) de envasado y se 25 disponen en una línea, separados entre sí, constituyendo la línea dicha formación predefinida; y
c’. la línea de receptáculos (1) se traslada longitudinalmente para poner los receptáculos (1) de uno en uno dentro de la máquina (M) de envasado, manteniendo constantemente los receptáculos (1) , durante la traslación, separados entre sí, y en el que la etapa a. se lleva a cabo aplicándola a toda una línea de receptáculos (1) de la bandeja (20) que está en la posición (P) de recogida, elevando toda la línea verticalmente y al mismo tiempo de la bandeja (20) ;
durante la etapa b’. la línea de receptáculos (1) recogidos durante la fase a’. se rota de manera que todos los receptáculos (1) se dispongan verticalmente, y la línea rotada de receptáculos (1) se dispone en la formación de línea en la entrada (I) de la máquina (M) de envasado, después de lo cual se realiza la etapa c’.;
las etapas a’, b’ y c’ se repiten aplicándolas de manera cíclica a cada una de las líneas paralelas de los receptáculos (1) alojados en la bandeja (20) y se llevan a cabo de manera que la etapa c’ tenga una duración que es como máximo igual a la suma de las duraciones de la etapa a. y la etapa b’., de manera que la etapa c’ de un ciclo en relación con una línea de receptáculos (1) pueda completarse durante las etapas a’ y b’, aplicadas a una línea adicional de receptáculos (1) en un ciclo siguiente; y
después de que se han cogido todos los receptáculos (1) que se alojaron en la bandeja (20) en la 45 posición (P) de recogida, la bandeja (20) se retira de la cinta (L) transportadora, que hace avanzar una bandeja (20) adicional hasta la posición (P) de recogida y las etapas del método se repiten desde el comienzo.
3. Método según la reivindicación 2, en el que los receptáculos son cilindros (1) para jeringuillas, adecuados para contener un líquido que va a inyectarse, comprendiendo cada cilindro (1) un cuello (10) de soporte superior, formado en un reborde de una respectiva boca, y teniendo un lado (11) inferior opuesto a la boca, estando el método caracterizado porque, durante la etapa c., los cilindros (1) se disponen con el cuello (10) de soporte y la boca ubicados arriba y el lado (11) inferior ubicado abajo.
4. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque:
en la entrada (I) de la máquina (M) de envasado se proporcionan una pluralidad de asientos (51) móviles, cada uno para alojar un receptáculo (1) relativo y para poner los receptáculos (1) alojados en los mismos en una entrada (I) de la máquina (M) de envasado,
durante la etapa c, los asientos (51) móviles están dispuestos uno con respecto a otro de tal manera que los receptáculos (1) , una vez insertados en los asientos (51) móviles relativos, están en cada momento en dicha formación predefinida en la que están separados entre sí,
los asientos (51) móviles se mueven de manera continua, y porque
durante la etapa b, los receptáculos (1) se insertan en los asientos (51) móviles en un modo de
seguimiento en el que los receptáculos (1) se insertan cuando los asientos (51) móviles están
moviéndose.
5 5. Aparato para transferir una pluralidad de receptáculos (1) tubulares hechos de un material frágil, en el que
los receptáculos son cilindros (1) para jeringuillas adecuados para contener dosis de sustancias médicas,
desde recipientes (2, 20) , comprendiendo cada uno un nido (2) para cilindros (1) , que comprende a su vez
una cavidad pasante vertical para alojar verticalmente un respectivo cilindro (1) , con un cuello (10) de
soporte del cilindro (1) que descansa sobre una superficie superior de la cavidad, y con un lado (11) inferior,
opuesto al cuello (10) , que sobresale por debajo del nido (2) , a una máquina (M) de envasado que
comprende una entrada (I) para recibir los cilindros (1) , comprendiendo el aparato (A) :
al menos un medio (3) de recogida para recoger una pluralidad de cilindros (1) cada vez de un nido (2) y
15 soltar los cilindros (1) , una vez recogidos, estando el medio (3) de recogida configurado para mantener los cilindros (1) separados mientras que se recogen y una vez que se recogen y comprendiendo una
pluralidad de pinzas (30) , comprendiendo cada una un par de mordazas (31) , que pueden situarse
encima del nido (2) , pudiendo cerrarse cada pinza (30) para agarrar individualmente un cilindro (1) , o
pudiendo abrirse alternativamente con el fin de soltar el cilindro (1) , estando las pinzas (30) dispuestas a
una distancia recíproca de manera que los cilindros (1) , mientras que se agarran y una vez que se
agarran por una respectiva pinza (30) , se mantengan separados entre sí,
al menos un dispositivo (5) de inserción previsto en la entrada (I) de la máquina (M) de envasado, para
poner los cilindros (1) extraídos del nido (2) en la entrada (I) de la máquina (M) de envasado, donde se
25 cogen, comprendiendo el dispositivo (5) de inserción una pluralidad de asientos (51) móviles dispuestos separados entre sí, siendo cada uno adecuado para alojar un cilindro (1) , de tal manera que los cilindros
(1) alojados se dispongan en una configuración predefinida en la que están separados entre sí, pudiendo
activarse adicionalmente el dispositivo (5) de inserción para mover los asientos (51) móviles, con los
receptáculos alojados en los mismos, de manera que los cilindros (1) se pongan en la entrada (I) de la
máquina (M) de envasado y
un medio (4) de desplazamiento para soportar el medio (3) de recogida y desplazarlo, una vez que ha
recogido los cilindros (1) , de modo que los cilindros (1) recogidos se extraigan del nido (2) y luego se
lleven al dispositivo (5) de inserción, pudiendo activarse el medio (4) de desplazamiento para desplazar el
35 medio (3) de recogida, una vez que ha recogido los cilindros (1) , hasta el dispositivo (5) de inserción, y moverlo de manera que los cilindros (1) se introduzcan en asientos (51) móviles relativos del dispositivo
(5) de inserción, mediante lo cual, una vez que el medio (3) de recogida los ha soltado, se alojan en los
asientos (51) móviles, en el que
el medio (3) de recogida comprende al menos un elemento (32) empujador, que puede situarse por
debajo del nido (2) y que comprende una superficie (320) de tope superior, pudiendo el elemento (32)
empujador oscilar verticalmente de manera que, cuando realiza un movimiento hacia arriba, pueda
empujar con la superficie (320) superior del mismo el lado (11) inferior de los cilindros (1) de una línea en
el nido (2) , haciendo que, en los cilindros (1) empujados, una respectiva parte (101) superior que
45 comprende el cuello (10) de soporte sobresalga por encima del alojamiento (21) relativo, y por tanto el nido (2) ;
la pluralidad de pinzas (30) puede situarse encima del nido (2) ; y en el que cada uno de los pares de
mordazas (31) puede cerrarse para agarrar uno de los cilindros (1) empujados hacia arriba por el
elemento (32) empujador, agarrándolo firmemente por una parte (101) sobresaliente superior del mismo,
o que puede abrirse alternativamente con el fin de soltar el cilindro (1) ,
en el que el medio (4) de desplazamiento comprende un robot (400) para soportar y mover la pluralidad
de pinzas (30) en el espacio,
55 comprendiendo el robot (400) :
un cuerpo (40) de apoyo destinado a oscilar entre posiciones de carga del mismo, mediante un flanco
del nido (2) que aloja los cilindros (1) que van a recogerse, y una posición de descarga del mismo en
las proximidades del dispositivo (5) de inserción,
una guía (41) para limitar la oscilación del cuerpo (40) de apoyo,
un motor para desplazar el cuerpo (40) de apoyo a lo largo de la guía (41) o para detener el cuerpo
65 (40) de apoyo en cualquier posición a lo largo de la misma; y
un brazo (42) de soporte montado firmemente en el cuerpo (40) de apoyo, brazo (42) de soporte en el
que están montadas una pluralidad de pinzas (30) , pudiendo moverse el brazo (42) de soporte con el
fin de desplazar las pinzas (30) a lo largo de dos ejes cartesianos de un plano vertical;
5 estando el cuerpo (40) de apoyo, cuando se encuentra en las posiciones de carga, dispuesto con
respecto a los nidos (2) de manera que el brazo (42) de soporte pueda elevar las pinzas (30) , una vez
que las pinzas (30) han agarrado los cilindros (1) , para extraer los cilindros (1) de los nidos (2) , y
estando el cuerpo (40) de apoyo, cuando se encuentra en la posición de descarga, dispuesto además
con respecto al dispositivo (5) de inserción de manera que el brazo (42) pueda bajar las pinzas (30)
que soportan los cilindros (1) de modo que los cilindros (1) se inserten en respectivos asientos (51)
móviles del dispositivo (5) de inserción, y porque el medio (4) de desplazamiento comprende además
un miembro (34) empujador montado firmemente en el cuerpo (40) de apoyo del robot (400) y fijado
por abajo al elemento (32) empujador, que puede activarse para provocar una oscilación vertical del
15 elemento (32) empujador; y porque el elemento (32) empujador está montado en el miembro (34) empujador de manera que la superficie (320) de tope superior esté verticalmente debajo de la
pluralidad de pinzas (30) .
6. Aparato para transferir una pluralidad de receptáculos (1) tubulares hechos de un material frágil, por
ejemplo cilindros para jeringuillas o viales, adecuados para contener dosis de sustancias médicas, desde
recipientes (2, 20) , comprendiendo cada recipiente una bandeja (20) para receptáculos (1) hechos de un
material frágil, que comprende a su vez pluralidades de alojamientos (201) abiertos, accesibles por arriba y
que pueden alojar individualmente respectivos receptáculos (1) dispuestos horizontalmente en los mismos
de manera que los receptáculos (1) estén separados entre sí, a una máquina (M) de envasado que
25 comprende una entrada (I) para recibir los receptáculos (1) , comprendiendo el aparato:
- al menos un medio (3) de recogida para recoger una pluralidad de receptáculos (1) cada vez desde una
bandeja (20) y soltar los receptáculos (1) , una vez recogidos, estando el medio (3) de recogida
configurado para mantener los receptáculos (1) separados mientras que se recogen y una vez que se
recogen y comprendiendo el medio (3) de recogida una pluralidad de pinzas (30) , comprendiendo cada
una un par de mordazas (31) , que pueden situarse encima de la bandeja (20) , pudiendo cerrarse cada
pinza (30) para agarrar individualmente un receptáculo (1) , o pudiendo abrirse alternativamente con el fin
de soltar el receptáculo (1) , estando las pinzas (30) dispuestas a una distancia recíproca de manera que
los receptáculos (1) , mientras que se agarran y una vez que se agarran por una respectiva pinza (30) , se
35 mantengan separados entre sí,
- al menos un dispositivo (5) de inserción previsto en la entrada (I) de la máquina (M) de envasado, para
poner los receptáculos (1) extraídos de la bandeja (20) en la entrada (I) de la máquina (M) de envasado,
donde se cogen, comprendiendo el dispositivo (5) de inserción una pluralidad de asientos (51) móviles
dispuestos separados entre sí, siendo cada uno adecuado para alojar un receptáculo (1) , de tal manera
que los receptáculos (1) alojados se dispongan en una configuración predefinida en la que están
separados entre sí, pudiendo activarse adicionalmente el dispositivo (5) de inserción para mover los
asientos (51) móviles, con los receptáculos alojados en los mismos, de manera que los receptáculos (1)
se pongan en la entrada (I) de la máquina (M) de envasado y
45 - un medio (4) de desplazamiento para soportar el medio (3) de recogida y desplazarlo, una vez que ha
recogido los receptáculos (1) , de modo que los receptáculos (1) recogidos se extraigan de la bandeja (20)
y luego se lleven al dispositivo (5) de inserción, pudiendo activarse el medio (4) de desplazamiento para
desplazar el medio (3) de recogida, una vez que ha recogido los receptáculos (1) , hasta el dispositivo (5)
de inserción, y moverlo de manera que los receptáculos (1) se introduzcan en asientos (51) móviles
relativos del dispositivo (5) de inserción, mediante lo cual, una vez que el medio (3) de recogida los ha
soltado, se alojan en los asientos (51) móviles:
en el que cada pinza (30) comprende un par de mordazas (31) dimensionadas para insertarse en un
55 alojamiento (201) para agarrar un receptáculo (1) ;
y en el que el medio (4) de desplazamiento comprende un robot (400) para soportar y mover
la pluralidad de pinzas (30) en el espacio y un dispositivo de rotación conectado a la pluralidad de
pinzas (30) para poder hacer rotar las pinzas (30) para disponer verticalmente los receptáculos (1)
tomados de la pluralidad de pinzas (30) , una vez extraídos del alojamiento (210) relativo de la bandeja
(20) .
7. Aparato según la reivindicación 5, destinado para su uso en un caso en el que los alojamientos (21) se
65 disponen en líneas paralelas en el nido (2) , caracterizado porque el cuerpo (40) de apoyo puede moverse a lo largo de la guía (41) para poder disponerse en varias posiciones de carga mediante un flanco del nido
(2) , en cada una de las cuales el elemento (32) empujador y la pluralidad de pinzas (33) se disponen respectivamente debajo o encima de una de las líneas de alojamientos (21) del nido (2) .
8. Aparato según la reivindicación 5 o la reivindicación 6, caracterizado porque la pluralidad de pinzas (30) se forma por dos placas enfrentadas, comprendiendo cada una, una base continua que tiene un borde superior sujeto de manera rotatoria a una parte (33) restante del medio (3) de recogida, y teniendo también un borde inferior libre que forma una pluralidad de dientes (31) , cada uno de los cuales está curvado en forma de L en las proximidades de un extremo libre del mismo, conformados para poder hacer tope con una pared
(100) lateral de un receptáculo (1) , constituyendo cada diente (31) una de dos mordazas de una pinza (30) ,
y estando dispuesto enfrentado a un diente (31) de la otra placa, produciendo alternativamente la rotación recíproca de las placas una apertura o un cierre de todas las pinzas (30) al mismo tiempo.
9. Aparato según la reivindicación 5 o la reivindicación 6, caracterizado porque el dispositivo (5) de inserción comprende un tornillo (50) de Arquímedes que puede hacerse rotar alrededor de un eje de rotación central
que pasa por la entrada (I) de la máquina (M) de envasado, teniendo el tornillo (50) de Arquímedes, en una periferia lateral del mismo, un canal (500) helicoidal dispuesto alrededor del eje central, canal (500) que está dimensionado para poder alojar un receptáculo (1) dispuesto verticalmente, haciendo tope con una pared (100) lateral del mismo.
10. Aparato según la reivindicación anterior, para transferir cilindros (1) para jeringuillas, de un tipo que comprende un cuello (10) de soporte superior formado en un reborde de una respectiva boca y que tiene un lado (11) inferior opuesto a la boca, con una pared (100) lateral que une el lado (11) inferior al cuello (10) de soporte, caracterizado porque el dispositivo (5) de inserción comprende además un elemento (52) de guía y descanso recto destinado a recibir de manera deslizante en descanso los cuellos (10) de soporte de los cilindros (1) , una vez albergados en el dispositivo (5) de inserción, de modo que los cilindros (1) se soporten por el elemento (52) de descanso; pudiendo situarse además el elemento (52) de descanso paralelo al eje de rotación del tornillo (50) de Arquímedes y estando situado con respecto al mismo de manera que el canal
(500) defina, junto con el elemento (52) de descanso, dicha pluralidad de asientos (51) móviles, dispuestos en una línea a lo largo de un desarrollo longitudinal del tornillo (50) de Arquímedes, pudiendo alojarse cada cilindro (1) en cada uno de los asientos (51) móviles, albergados en el canal (50) y descansando sobre el elemento (52) recto, moviéndose cada asiento (51) móvil a lo largo del desarrollo longitudinal del tornillo (50) de Arquímedes cuando se activa el tornillo (50) de Arquímedes en rotación.
11. Aparato según la reivindicación anterior, caracterizado porque se proporciona un paso (530) recto en el
elemento (52) de guía y descanso, siendo el paso (530) paralelo a un eje de simetría del tornillo (50) de Arquímedes, definido por dos bordes (521, 522) laterales enfrentados entre sí, estando el paso (520) recto dispuesto encima del tornillo (50) de Arquímedes y teniendo una anchura que es tal que los cilindros (1) puedan insertarse libremente entre los bordes (521, 522) laterales del mismo sólo hasta los cuellos (10) de soporte de los mismos, de manera que dos partes opuestas de cada cuello (10) se reciban cada una en descanso en un borde (521, 522) diferente que flanquea y que define el paso (50) del elemento (52) de guía y descanso.
Patentes similares o relacionadas:
Vástago de émbolo conectable y empaquetado asociado, del 10 de Junio de 2020, de Becton Dickinson France S.A.S: Un sistema de empaquetado de jeringas , que comprende: un cilindro de jeringa que tiene un primer extremo , un segundo extremo […]
Dispositivo de bloqueo de seguridad de captura de aguja para catéter, del 10 de Junio de 2020, de BECTON, DICKINSON AND COMPANY: Un montaje de catéter que comprende: un catéter flexible; una aguja que tiene una punta distal filosa, la aguja dispuesta en el […]
Puerto de acceso que incluye un septo con tres salientes y un dispositivo de comunicación para la identificación del septo, del 10 de Junio de 2020, de C.R. BARD, INC.: Un puerto de acceso implantable que comprende: un cuerpo que define una cavidad, estando el cuerpo configurado para capturar […]
Dispositivo médico de inyección que tiene un protector, del 10 de Junio de 2020, de NOVO NORDISK A/S: Un dispositivo de inyección prellenado para el suministro de dosis establecidas de un medicamento líquido que comprende: Una carcasa con forma de pluma […]
Aparato médico de aplicación en la piel, del 3 de Junio de 2020, de Zurex Pharma, Inc: Aparato para aplicar un fluido, que comprende un cuerpo principal hueco que tiene un extremo proximal abierto del cuerpo principal, […]
Dispositivo médico basado en aguja, que incluye una guía de aguja y procedimiento de construcción, del 3 de Junio de 2020, de ERSKINE MEDICAL LLC: Un dispositivo médico basado en aguja que comprende: una aguja con un extremo proximal y un extremo distal ; un tubo con un primer lumen ; […]
Aparato de seguridad y método para rastrear, controlar y vigilar la administración de sustancias médicas, del 27 de Mayo de 2020, de Murata ID Solutions S.r.l: Aparato de seguridad para rastrear, controlar y vigilar la administración de sustancias médicas, que comprende: - un envase de una […]
Aparato autoinyector con recipiente flexible, del 27 de Mayo de 2020, de MERIDIAN MEDICAL TECHNOLOGIES, INC.: Un aparato autoinyector, que comprende: un recipiente flexible (16; 108; 108' , 108"; 320, 322; 420, 422; 502) que contiene un medicamento líquido ; una […]