Método para determinar la medida de hendidura y/o las marcas de nivelación de piezas de carrocería de un vehículo a motor y programa de control.
Método para determinar la medida de hendidura y/o las marcas de nivelación de piezas de carrocería de unvehículo a motor,
donde
- las piezas de carrocería (101, 102) a ser alineadas unas con respecto a otras, respectivamente mediante undispositivo de escaneo (104), son escaneadas de forma tridimensional en una pluralidad de áreas de medición (141)predeterminables, donde es medido un perfil de superficie 3D de las piezas de carrocería (101, 102) como objetosde medición, y donde las áreas de medición (141) son parametrizadas de forma específica con respecto al vehículoy los dispositivos de escaneo (104), a través de la parametrización predeterminada específica del vehículo, sonalineados con al menos una junta de la carrocería (103),
- los elementos de superficie tridimensionales (401, 402), dentro de las áreas de medición (141), asociados a laspiezas de carrocería (101, 102) a ser alineadas, son determinados en base a los valores de escaneo obtenidosmediante los dispositivos de escaneo (104), donde los elementos de superficie tridimensionales (401, 402), dentrode las áreas de medición (141), asociados a las piezas de carrocería (101, 102) a ser alineadas, son identificados enbase a los valores de escaneo obtenidos mediante los dispositivos de escaneo (104),
- para los elementos de superficie tridimensionales (401, 402) determinados respectivamente se determinan laclase, posición y orientación en el espacio,
- en base a la clase, posición y orientación de al menos dos elementos de superficie tridimensionales (401, 402)contiguos se determina la medida de separación y/o las marcas de nivelación para al menos dos piezas decarrocería (101, 102) a ser alineadas una con respecto a otra.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10174666.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: SIMON,FRANK, JODOIN,THOMAS, PFÖRTNER,ANDREAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la distancia o la separación entre objetos espaciados o entre aberturas espaciadas (G01B 11/26 tiene prioridad; telémetros G01C 3/00).
- G01B11/245 G01B 11/00 […] › que utilizan una pluralidad de transductores fijos que funcionan simultáneamente (G01B 11/255 tiene prioridad).
- G06T7/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
PDF original: ES-2409269_T3.pdf
Fragmento de la descripción:
Método para determinar la medida de hendidura y/o las marcas de nivelación de piezas de carrocería de un vehículo a motor y programa de control.
Al unir piezas de carrocería de un vehículo a motor se producen hendiduras y marcas de nivelación entre las piezas de carrocería. Dentro del marco de los controles de calidad para el control de robots o en bucles de retroalimentación se miden de forma automática la medida de hendidura y las marcas de nivelación. Los valores de medición determinados en una medición de esta clase, a modo de ejemplo, son transferidos también a sistemas automatizados de producción de orden superior.
Hasta el momento, para la medición de la medida de hendidura y las marcas de nivelación se utilizan métodos de medición bidimensionales basados en sistemas de medición de triangulación láser o en sistemas especiales de iluminación, a través de los cuales los bordes pueden visualizarse particularmente bien para captaciones mediante cámara. Los sistemas de medición de triangulación láser proporcionan sólo valores de medición a lo largo de una línea o curva de escaneo, por ejemplo como la proyección de un borde de una superficie curvada en un plano de medición o de observación. Por tanto, los algoritmos de evaluación correspondientes posibilitan sólo el análisis de curvas que se extienden dentro de un plano. De este modo, de forma acorde a los principios aplicados hasta el momento, la medida de hendidura y las marcas de nivelación se calculan mediante ajustes de líneas, círculos o polinomios en dos dimensiones. Del mismo modo, los métodos de medición con sistemas de iluminación que resaltan los bordes proporcionan sólo valores de medición bidimensionales, pero de forma paralela a una hendidura a ser medida. En principio, ni los métodos de medición basados en sistema de medición de triangulación láser, ni los métodos de medición que utilizan sistemas de iluminación que resaltan los bordes proporcionan datos de medición tridimensionales.
Por la solicitud EP 1 355 126 A1 se conoce un método de medición para medir un área de junta entre un primer componente y un segundo componente, donde el primer componente presenta una primera superficie y el segundo componente una segunda superficie. Se proyecta además una primera recta que se adecua al desarrollo de la primera superficie. De forma adicional, se proyecta una segunda recta que se adecua al desarrollo de la segunda superficie. Se proyecta asimismo una tercera recta que corta la primera y la segunda recta en el área de junta. La tercera recta con la primera recta forman un primer ángulo. De forma análoga, la tercera recta con la segunda recta forman un segundo ángulo. Además, la tercera recta presenta una primera distancia con respecto al primer componente, mientras que posee a su vez una segunda distancia con respecto al segundo componente. Tanto los dos ángulos, como también las dos distancias poseen una relación predeterminada unos con respecto a otros. En base a la posición de la tercera recta puede determinarse al menos una característica del área de junta.
Por las solicitudes US 4, 498, 776 y US 5, 129, 010 se conocen otros métodos de medición bidimensionales. En estos métodos se considera desventajoso el hecho de requerirse por vehículo un sensor para cada hendidura a ser medida. Debido a ello, por lugar de medición, de acuerdo con el tipo de vehículo a ser verificado, se emplea una cantidad de dos cifras de dispositivos de escaneo. Como consecuencia, resultan costes elevados para los bancos de prueba de esta clase que, en particular en el caso de una readaptación para nuevos tipos de vehículos, implican costes operativos elevados. Otra desventaja de los métodos de medición bidimensionales que utilizan sistemas de medición de triangulación láser reside en el hecho de que los sistemas de medición de triangulación láser siempre deben ser orientados de modo tal que las líneas láser proyectadas se sitúen de forma vertical con respecto a la hendidura a ser medida. De lo contrario, con los métodos de medición bidimensionales, las hendiduras son medidas con una anchura mayor que la que realmente poseen. En el caso de los métodos de medición conocidos por las solicitudes US 4, 498, 776 y US 5, 129, 010 es además problemático medir las marcas de nivelación sólo de forma puntual a lo largo de una ruta de escaneo que idealmente corta de forma vertical la hendidura a ser medida. Si dos piezas de carrocería separadas por la hendidura rotan de forma relativa una con respecto a otra alrededor de un eje que se extiende a través de la ruta de escaneo, no se modifica entonces un valor de medición de las marcas de nivelación determinado del modo arriba mencionado, el cual por tanto sólo es representativo de forma insuficiente para las marcas de nivelación entre dos piezas de carrocería a ser alineadas una con respecto a otra.
Por la solicitud US-5416590 se conoce un método para determinar la medida de hendidura y las marcas de nivelación, donde se proyectan dos planos de luz.
Es objeto de la presente invención el indicar un método para determinar la medida de hendidura y las marcas de nivelación de piezas de carrocería de un vehículo a motor que pueda implementarse de forma precisa y favorable en cuantos a costes, así como una implementación apropiada del método.
Conforme a la invención, este objeto se alcanzará a través de un método con las características indicadas en la reivindicación 1, un programa de control con las características indicadas en la reivindicación 7 y un dispositivo de medición con las características indicadas en la reivindicación 8. En las reivindicaciones dependientes se indican perfeccionamientos ventajosos de la presente invención.
Conforme a la invención, para determinar la medida de hendidura y las marcas de nivelación de piezas de carrocería de un vehículo a motor, mediante respectivamente un dispositivo de escaneo tridimensional, son medidas piezas de carrocería a ser alineadas unas con respecto a otras en una pluralidad de áreas de medición predeterminables. Los dispositivos de escaneo se encuentran alineados al menos con una junta de la carrocería y escanean las piezas de carrocería a ser alineadas no sólo a lo largo de una línea o curva de escaneo, sino dentro de superficies de medición planas. En base a los valores de medición determinados mediante los dispositivos de escaneo son determinados elementos de superficie tridimensionales asociados a las piezas de carrocería a ser alineadas, dentro de las áreas de medición. Para los elementos de superficie tridimensionales determinados, respectivamente se determinan la clase, posición y orientación en el espacio. En base a la clase, posición y orientación de al menos dos elementos de superficie tridimensionales contiguos se determina la medida de hendidura o las marcas de nivelación para al menos dos piezas de carrocería a ser alineadas una con respecto a otra. El utilizar un método conforme a la invención en lugar de los métodos de medición bidimensionales, a través de una perfilometría tridimensional, posibilita el empleo de algoritmos 3D considerablemente más estables y flexibles para el cálculo de la medida de hendidura y de las marcas de nivelación.
A continuación, la presente invención se explicará en detalle a través de un ejemplo de ejecución, haciendo referencia a los dibujos. Éstos muestran:
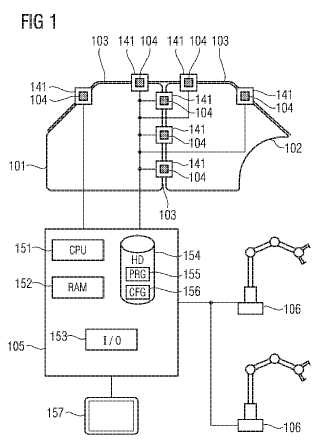
Figura 1: una representación esquemática de un dispositivo de medición para determinar la medida de hendidura y las marcas de nivelación de piezas de carrocería de un vehículo a motor,
Figura 2: un diagrama de flujo para una medición de la medida de hendidura y de marcas de nivelación,
Figura 3: un diagrama de flujo para una medición de la medida de hendidura y de las marcas de nivelación, así como la sucesiva transferencia de valores de corrección a un controlador de robots, y
Figura 4: una representación esquemática de dos piezas de carrocería y elementos de superficie tridimensionales asociados a las piezas de carrocería dentro de un área de medición.
El dispositivo de medición para determinar la medida de hendidura y las marcas de nivelación de piezas de carrocería 101, 102 de un vehículo a motor, representado en la figura 1, comprende una pluralidad de dispositivos de escaneo 104 para el escaneo tridimensional de piezas de carrocería 101, 102 a ser alineadas unas con respecto a otras en una pluralidad de áreas de medición 141. Los dispositivos de medición 104 se encuentran alineados con varias juntas de la carrocería 103 y, a modo de ejemplo, se encuentran realizados como escáneres láser. Las áreas de medición 141 se encuentran parametrizadas de forma específica con respecto al vehículo.... [Seguir leyendo]
Reivindicaciones:
1. Método para determinar la medida de hendidura y/o las marcas de nivelación de piezas de carrocería de un vehículo a motor, donde
- las piezas de carrocería (101, 102) a ser alineadas unas con respecto a otras, respectivamente mediante un dispositivo de escaneo (104) , son escaneadas de forma tridimensional en una pluralidad de áreas de medición (141) predeterminables, donde es medido un perfil de superficie 3D de las piezas de carrocería (101, 102) como objetos de medición, y donde las áreas de medición (141) son parametrizadas de forma específica con respecto al vehículo y los dispositivos de escaneo (104) , a través de la parametrización predeterminada específica del vehículo, son alineados con al menos una junta de la carrocería (103) ,
- los elementos de superficie tridimensionales (401, 402) , dentro de las áreas de medición (141) , asociados a las piezas de carrocería (101, 102) a ser alineadas, son determinados en base a los valores de escaneo obtenidos mediante los dispositivos de escaneo (104) , donde los elementos de superficie tridimensionales (401, 402) , dentro de las áreas de medición (141) , asociados a las piezas de carrocería (101, 102) a ser alineadas, son identificados en base a los valores de escaneo obtenidos mediante los dispositivos de escaneo (104) ,
- para los elementos de superficie tridimensionales (401, 402) determinados respectivamente se determinan la clase, posición y orientación en el espacio,
- en base a la clase, posición y orientación de al menos dos elementos de superficie tridimensionales (401, 402) contiguos se determina la medida de separación y/o las marcas de nivelación para al menos dos piezas de carrocería (101, 102) a ser alineadas una con respecto a otra.
2. Método conforme a la reivindicación 1, donde los elementos de superficie tridimensionales (401, 402) se determinan mediante perfilometría.
3. Método conforme a una de las reivindicaciones 1 ó 2, donde una medición superficial de las piezas de carrocería (101, 102) a ser alineadas unas con respecto a otras se efectúa mediante triangulación, utilizando luz codificada emitida sobre las áreas de medición (141) .
4. Método conforme a una de las reivindicaciones 1 ó 2, donde una medición superficial de las piezas de carrocería (101, 102) a ser alineadas unas con respecto a otras se efectúa mediante interferometría o estereografía.
5. Método conforme a una de las reivindicaciones 1 a 4, donde se efectúa una medición simultánea de una pluralidad de juntas de la carrocería.
6. Método conforme a una de las reivindicaciones 1 a 5, donde valores de corrección, para un posicionamiento de las piezas de carrocería (101, 102) a ser alineadas unas con respecto a otras, son obtenidos en base a la medida de hendidura determinada y a las marcas de nivelación determinadas a través de los dispositivos de transporte y/o de montaje (106) que reciben las piezas de carrocería (101, 102) .
7. Programa de control que puede cargarse en una memoria de trabajo de una unidad informática y que presenta al menos un segmento de código que puede ser procesado por un procesador, en cuya ejecución
- el escaneado tridimensional de las piezas de carrocería (101, 102) a ser alineadas unas con respecto a otras es inducido en una pluralidad de áreas de medición (141) predeterminables, respectivamente a través de un dispositivo de escaneo (104) , donde se mide un perfil de la superficie 3D de las piezas de carrocería (101, 102) como objetos de medición, y donde las áreas de medición (141) son parametrizadas de forma específica con respecto al vehículo y los dispositivos de escaneo (104) son alineados mediante la parametrización predeterminada específica del vehículo con al menos una junta de la carrocería (103) ,
- los elementos de superficie tridimensionales (401, 402) , dentro de las áreas de medición (141) , asociados a las piezas de carrocería (101, 102) a ser alineadas, son determinados en base a los valores de escaneo obtenidos mediante los dispositivos de escaneo (104) , donde los elementos de superficie tridimensionales (401, 402) asociados a las piezas de carrocería (101, 102) a ser alineadas, dentro de las áreas de medición (141) , son identificados en base a los valores de escaneo obtenidos mediante los dispositivos de escaneo (104) ,
- para los elementos de superficie tridimensionales (401, 402) determinados se determinan respectivamente la clase, posición y orientación en el espacio,
- en base a la clase, posición y orientación de al menos dos elementos de superficie tridimensionales (401, 402) contiguos se determinan la medida de hendidura y/o las marcas nivelación para al menos dos piezas de carrocería (101, 102) a ser alineadas una con respecto a otra, cuando el programa de control se desarrolla en la unidad informática.
8. Dispositivo de medición para determinar la medida de hendidura y/o las marcas de nivelación de piezas de carrocería de un vehículo a motor, con
- una pluralidad de dispositivos de escaneo (104) para el escaneo tridimensional de piezas de carrocería (101, 102) a ser alineadas unas con respecto a otras en una pluralidad de áreas de medición (141) predeterminables y para la medición de un perfil de superficie 3D de las piezas de carrocería (101, 102) como objetos de medición, donde las
áreas de medición (141) son parametrizadas de forma específica con respecto al vehículo y los dispositivos de escaneo (104) , mediante la parametrización predeterminada, específica con respecto al vehículo, pueden alinearse con al menos una junta de la carrocería (103) ,
- una unidad informática (105) que se encuentra conectada a los dispositivos de escaneo (104)
- para determinar los elementos de superficie tridimensionales (401, 402) , dentro de las áreas de medición (141) ,
asignados a las piezas de carrocería (101, 102) a ser alineadas, en base a valores de escaneo obtenidos mediante los dispositivos de escaneo (104) , donde los elementos de superficie tridimensionales (401, 402) asociados a las piezas de carrocería (101, 102) a ser alineadas dentro de las áreas de medición (141) pueden ser identificados mediante valores de escaneo obtenidos a través de los dispositivos de escaneo (104) .
- para determinar respectivamente la clase, posición y orientación en el espacio para los elementos de superficie 20 tridimensionales (401, 402) determinados y
- para determinar la medida de hendidura y/o las marcas de nivelación para al menos dos piezas de carrocería (101, 102) a ser alineadas unas con respecto a otras en base a la clase, posición y orientación de al menos dos elementos de superficie tridimensionales (401, 402) contiguos.
Patentes similares o relacionadas:
Método, sistema y producto del programa informático para determinar la presencia de microorganismos e identificar dichos microorganismos, del 29 de Julio de 2020, de BIOMERIEUX: Un método para determinar la presencia de al menos un microorganismo determinado en una placa de Petri que comprende una o más colonias de microorganismos y un medio de […]
Detección de daño de pantalla para dispositivos, del 8 de Julio de 2020, de Hyla, Inc: Un procedimiento para identificar una condición de una o más pantallas de un dispositivo electrónico, comprendiendo el procedimiento: recibir una solicitud […]
PROCEDIMIENTO DE IDENTIFICACIÓN DE IMÁGENES ÓSEAS, del 29 de Junio de 2020, de UNIVERSIDAD DE GRANADA: Procedimiento de identificación de imágenes óseas. La presente invención tiene por objeto un procedimiento para asistir en la toma de decisiones a un experto forense […]
Distribución controlada de muestras sobre sustratos, del 27 de Mayo de 2020, de Roche Diagnostics Hematology, Inc: Un procedimiento para distribuir una muestra de líquido sobre un sustrato , comprendiendo el procedimiento: obtener una […]
Procedimientos, sistemas y dispositivos para analizar datos de imágenes pulmonares, del 27 de Mayo de 2020, de Pulmonx Corporation: Procedimiento para analizar datos de tomografía computarizada de un pulmón, comprendiendo el procedimiento: recibir mediante un dispositivo […]
Sistema y procedimiento de control de calidad de platos preparados, del 14 de Mayo de 2020, de BEABLOO, S.L: Sistema y procedimiento de control de calidad de platos preparados. El sistema comprende medios de detección para detectar los ingredientes […]
Registro de imagen de catéter del seno coronario, del 13 de Mayo de 2020, de Biosense Webster (Israel), Ltd: Un aparato que comprende: un catéter cardíaco adaptado para su introducción en un seno coronario de un corazón de un sujeto vivo; una pantalla ; un dispositivo […]
Sistema y aplicación para visualizar la realidad exterior mientras se utilizan teléfonos y dispositivos móviles, del 11 de Mayo de 2020, de YAGÜE HERNANZ, Ricardo: 1. Sistema y aplicación para ver en los teléfonos y terminales móviles la realidad exterior a la vez que se usan y se visualizan sus […]