Medida de posición para un tubo de succión de una embarcación de dragado.
Método para determinar parámetros cinemáticos Q de un cable (144) que conecta un tubo de succión (126) a una embarcación de dragado (120),
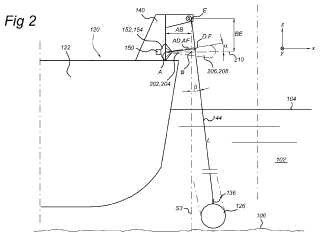
donde el tubo de succión (126) está en un punto de suspensión de tubo (136) conectado por el cable (144) a un punto de suspensión de cables E en la embarcación de dragado (120),
caracterizado por el hecho de que
a) proporciona una fuente de radar (152) y un detector de radar (154) a la embarcación de dragado (120), la fuente de radar (152) con un campo de emisión de radar (202) dirigido sustancialmente al cable (144);
b) irradia el cable (144) con el campo de emisión de radar (202);
c) recibe un campo de reflexión de radar (204) reflejado por el cable (144), usando el detector de radar (154), y
d) determina los parámetros cinemáticos Q a partir del campo de reflexión de radar (204).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12171429.
Solicitante: IHC Systems B.V.
Nacionalidad solicitante: Países Bajos.
Dirección: Industrieweg 30 3361 HJ Sliedrecht PAISES BAJOS.
Inventor/es: DE KEIZER,CORNELIS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E02F3/88 CONSTRUCCIONES FIJAS. › E02 HIDRAULICA; CIMENTACIONES; MOVIMIENTO DE TIERRAS. › E02F DRAGADO; MOVIMIENTO DE TIERRAS (extracción de turba E21C 49/00). › E02F 3/00 Dragas; Ingenios para el movimiento de tierras (para usos particulares E02F 5/00; otras máquinas o aparatos para la explotación minera E21C; construcción de túneles E21D). › con dispositivos actuando por efecto de aspiración o de retroceso, p. ej. dragas aspiradoras (bombas en general F04).
- E02F3/90 E02F 3/00 […] › Elementos constitutivos, p. ej. mandos, dispositivos de control.
PDF original: ES-2448959_T3.pdf
Fragmento de la descripción:
Medida de posición para un tubo de succión de una embarcación de dragado
CAMPO TÉCNICO
La invención se refiere a un método para determinar parámetros cinemáticos Q de un cable que conecta un tubo de succión a una embarcación de dragado, donde el tubo de succión está en un punto de suspensión de tubo conectado por el cable a un punto de suspension de cables E en el barco de dragado.
También, la invención se refiere a un producto de programa informático configurado para proporcionar instrucciones para llevar a cabo un método para determinar parámetros cinemáticos Q de un tubo de succión.
Además, la invención se refiere a una embarcación de dragado, que comprende un tubo de succión que está en un punto de suspensión de tubo conectado por un cable a un punto de suspensión de cables E en la embarcación de dragado.
ANTECEDENTES
En las operaciones de dragado con una embarcación de dragado, un conocimiento preciso de la posición de la cabeza de arrastre de succión en el extremo externo del tubo de succión de la embarcación de dragado es deseado. Tal conocimiento se puede utilizar para aumentar la exactitud de dragado y prevenir daños al tubo de succión y cabeza de arrastre por colisiones inesperadas. Como ejemplo de esto, el tubo de succión se puede flexionar en la dirección de eje transversal hacia el casco de la embarcación de dragado bajo la influencia de una resaca inesperada o agitación de la superficie del agua. La deformación del tubo de succión contra el casco del barco debe ser evitada a toda costa.
Según un método conocido de determinar la posición del tubo de succión y cabeza de succión, la embarcación de dragado comprende un tubo de succión que está en un punto de suspensión de tubo conectado por un cable de longitud L a un punto de suspensión de cables E en la embarcación de dragado. Este punto de suspensión de cables E se localiza en una grúa pórtico que lleva el cable, mediante la cual el tubo de succión es desplazable entre una posición de reposo sustancialmente horizontal y una posición de tubo inclinado. El cable pasa al punto de suspensión de cables E a través de una cabeza de cardan, que es libre para moverse en un plano expandido por una dirección de eje transversal X y una dirección vertical Z. El ángulo de la cabeza de cardan en este plano se mide por potenciómetros y es enviado a un ordenador, produciendo una indicación de la orientación del cable. La longitud del cable L se mide por un contador fuera de línea y también es enviada al ordenador. Se aplica una tensión constante en el cable, que lo mantiene tenso.
El problema de este tipo de medición de ángulo mecánico para el cable es que la cabeza de cardan y potenciómetros son propensos al desgaste mecánico y mal funcionamiento, reduciendo la exactitud y fiabilidad del método.
EP0009516A1 describe un método para determinar los parámetros cinéticos de un cable que conecta un tubo de succión a una embarcación de dragado, donde el tubo de succión está, en un punto de suspensión de tubo, conectado por el cable a un punto de suspensión de cables en la embarcación de dragado.
RESUMEN
Es un objetivo proporcionar un método por el que los parámetros cinemáticos Q para un cable que lleva un tubo de succión de la embarcación de dragado se puedan determinar de manera más robusta, y proporcionar una embarcación de dragado capaz de realizar tal método.
Este objetivo se consigue proporcionando, en un primer aspecto, un método según el preámbulo de la reivindicación 1, que se caracteriza por el hecho de que - provee una fuente de radar y un detector de radar a la embarcación de dragado, la fuente de radar con un campo de emisión de radar dirigido sustancialmente al cable; irradia el cable con el campo de emisión de radar; - recibe un campo de reflexión de radar reflejado por el cable, utilizando el detector de radar, y - determina los parámetros cinemáticos Q del campo de reflexión de radar.
Al proveer una fuente de radar y detector de radar, la orientación del cable se puede derivar de la señal de radar medida. La ubicación de la conexión de pivote en el casco y la longitud del tubo de succión se asume que son parámetros conocidos, que, en combinación con otros parámetros para el cable y/o el tubo de succión, pueden producir un conocimiento preciso de la ubicación de la cabeza de succión. Ventajosamente, las mediciones de radar se realizan a bordo de la embarcación es decir sobre la superficie del agua. Más generalmente, varios parámetros cinemáticos Q (p. ej. posición y/o componentes de velocidad, velocidad radial, y/o componentes de aceleración) del cable se pueden derivar por la fuente de radar y detector localizadas sobre la línea de flotación, produciendo un sistema de medición de la orientación de cable que es menos susceptible al desgaste inducido por el agua.
Dependiendo de la configuración de la fuente de radar y detector (es decir, la disposición y características operativas del conjunto de radar) , la medición de radar puede implicar sólo mediciones de puntos de distancia cercana, mediciones de línea, o incluso formación de imágenes tridimensionales de posición de cable.
En otras formas de realización del método, otros parámetros son medidos que constituyen restricciones o condiciones límite a los parámetros cinemáticos Q del cable. Combinando los parámetros cinemáticos del cable derivados de la medición de radar con otras medidas (independientes lineales) , la posición del tubo de succión y cabeza puede en última instancia ser determinada. Métodos de cálculo tridimensional iterativos se pueden utilizar en los cálculos requeridos, opcionalmente suplementados haciendo el promedio o filtrando para compensar errores de medición.
En particular, según otra forma de realización del método, la embarcación de dragado dispone de medios para determinar la longitud del cable L entre el punto de suspensión de tubo y el punto de suspensión de cables E, donde determinar los parámetros cinemáticos Q comprende: - determinar la longitud de cable L del cable.
Ventajosamente, la longitud del cable L entre el punto de suspensión de cables y el punto de suspensión de tubo proporciona información adicional en la determinación de los parámetros cinemáticos Q del cable. Los parámetros cinemáticos Q para el cable y la longitud de cable L pueden constituir un conjunto de parámetros suficiente para calcular la información posicional del tubo y cabeza de succión. Transformaciones goniométricas conocidas se pueden utilizar en la combinación de las mediciones de radar con mediciones de longitud de cable L para determinar los parámetros cinemáticos Q.
También, según otra forma de realización del método, el tubo de succión dispone de al menos un goniómetro de tubo, donde determinar los parámetros cinemáticos Q comprende: - determinar al menos un ángulo de inclinación X entre un eje de tubo longitudinal S 1 del tubo de succión y un eje de embarcación longitudinal S2 del casco de draga, para el tubo de succión en la posición de tubo inclinado.
Ventajosamente, el ángulo de inclinación X proporciona información adicional para mejorar la exactitud de determinación de los parámetros cinemáticos Q. La medición del ángulo de inclinación X puede reemplazar o complementar la medición de la longitud de cable L en la determinación de los parámetros cinemáticos Q. Los parámetros cinemáticos Q para el cable y al menos el ángulo de inclinación X del tubo de succión pueden constituir un conjunto de parámetros suficiente para calcular la información posicional del tubo y cabeza de succión. Transformaciones goniométricas conocidas se pueden utilizar en la combinación de las mediciones de radar con mediciones del ángulo de inclinación X para determinar los parámetros cinemáticos Q.
Según todavía otra forma de realización del método, el tubo de succión dispone de un sensor de presión donde determinar los parámetros cinemáticos Q comprende: - medir una presión P mediante el sensor de presión, y
- calcular la profundidad de una cabeza de succión en el segundo extremo de tubo del tubo de succión.
Ventajosamente, la profundidad de la cabeza de succión durante el dragado a partir de mediciones de sensor de presión proporciona información adicional para mejorar la exactitud de determinación de los parámetros cinemáticos Q. La medición de la profundidad de la cabeza de succión puede reemplazar o complementar la medición de la longitud de cable L y/o medición del ángulo de inclinación X en la determinación de los parámetros cinemáticos Q. Los parámetros cinemáticos Q para el cable... [Seguir leyendo]
Reivindicaciones:
1. Método para determinar parámetros cinemáticos Q de un cable (144) que conecta un tubo de succión (126) a una embarcación de dragado (120) , donde el tubo de succión (126) está en un punto de suspensión de tubo (136) conectado por el cable (144) a un punto de suspensión de cables E en la embarcación de dragado (120) ,
caracterizado por el hecho de que a) proporciona una fuente de radar (152) y un detector de radar (154) a la embarcación de dragado (120) , la fuente de radar (152) con un campo de emisión de radar (202) dirigido sustancialmente al cable (144) ;
b) irradia el cable (144) con el campo de emisión de radar (202) ;
c) recibe un campo de reflexión de radar (204) reflejado por el cable (144) , usando el detector de radar (154) , y
d) determina los parámetros cinemáticos Q a partir del campo de reflexión de radar (204) .
2. Método según la reivindicación 1, donde el cable (144) está esencialmente recto durante el uso, donde la determinación de los parámetros cinemáticos Q comprende:
- la determinación a partir del campo de reflexión de radar (204) , de una indicación de una distancia de cable AD entre un punto de referencia de detector A en el detector de radar (154) , y una región de cable D en el cable (144) .
3. Método según la reivindicación 2, donde irradiar el cable (144) con el campo de emisión de radar (202) comprende la emisión de un lóbulo principal de campo de emisión (206) del campo de emisión de radar (202) sustancialmente perpendicular a un casco de draga (122) de la embarcación de dragado (120) , hacia el cable (144) , y a lo largo de un eje de detector principal (210) del detector de radar (154) , donde la región de cable D es la región de cable más cercana F, y donde la distancia de cable AD está a una distancia de radar más corta AF entre el punto de referencia de detector A y la región de cable más cercana F.
4. Método según la reivindicación 3, donde el cable (144) tiene un componente vertical en una dirección vertical perpendicular tanto a una dirección de eje transversal X como a una dirección de eje longitudinal Y, el método comprende:
- determinar un ángulo de oscilación de cable vertical de eje transversal f, desde la distancia de radar más corta AF, una distancia horizontal proyectada AB entre el punto de referencia de detector A y el punto de suspensión de cables E, y una distancia vertical proyectada BE entre el punto de referencia de detector A y el punto de suspensión de cables E, y opcionalmente
donde la determinación del ángulo de oscilación de cable vertical de eje transversal f comprende resolver una
ecuación:
f = arcsen J , AF AB2 BE 2 ) -arcsen J , AB AB2 BE 2 )
5. Método según la reivindicación 4, donde el lóbulo principal de campo de detección (208) tiene un ángulo de anchura de mitad del haz característico a, donde la determinación del ángulo de oscilación de cable vertical de eje transversal f comprende resolver una ecuación alternativa:
J AB -AF. cos (a) ) f= arctan , -
BE -AF. sen (a)
si el ángulo de oscilación de cable vertical de eje transversal f es mayor que el ángulo de anchura de mitad del haz característico a.
6. Método según cualquiera de las reivindicacione.
3. 5, donde la embarcación de dragado (120) comprende una grúa pórtico (140) mediante la cual el tubo de succión (126) es desplazable entre una posición de reposo sustancialmente horizontal y una posición de tubo inclinado, donde el método comprende:
- dirigir el lóbulo principal de campo de emisión (206) al cable (144) , y
- dirigir un eje de detector principal (210) del detector de radar (154) al cable (144) , cuando el tubo de succión (126) está en la posición de tubo inclinado.
7. Método según cualquiera de las reivindicaciones precedentes, donde el detector de radar (154) está provisto en una ubicación de embarcación (402) en la embarcación de dragado (120) , y donde el método comprende:
- proporcionar otro detector de radar (406) en otra ubicación de embarcación (404) , diferente de la ubicación de embarcación (402) ;
- recibir un campo de reflexión de radar (204) reflejado por el cable (144) , usando el detector de radar (154) ;
- recibir otro campo de reflexión de radar (408) reflejado por el cable (144) , usando el otro detector de radar (406) , y
- determinar los parámetros cinemáticos Q del campo de reflexión de radar (204) y el otro campo de reflexión de radar (408) .
8. Método según cualquiera de las reivindicaciones precedentes, donde el tubo de succión (126) comprende una pluralidad de segmentos de tubo de succión, donde cada segmento de tubo de succión está interconectado rotativamente con un segmento de tubo de succión adyacente, y está en un punto de suspensión de segmento de tubo respectivo conectado por un cable respectivo a un punto de suspensión de cables respectivo, donde las acciones de:
a) proporcionar una fuente de radar respectiva y un detector de radar respectivo a la embarcación de dragado (120) , la fuente de radar respectiva con un campo de emisión de radar respectivo dirigido sustancialmente al cable respectivo;
b) irradiar el cable respectivo con el campo de emisión de radar respectivo;
c) recibir un campo de reflexión de radar respectivo reflejado por el cable respectivo, usando el detector de radar respectivo, y
d) determinar los parámetros cinemáticos respectivos Q' a partir del campo de reflexión de radar respectivo,
se ejecutan para cada segmento de tubo de succión posterior, empezando a partir de un primer segmento de tubo de succión que está en un primer extremo de tubo (130) conectado a un casco de draga (122) de la embarcación de dragado (120) .
9. Producto de programa informático configurado para proporcionar instrucciones para llevar a cabo un método según cualquiera de las reivindicaciones 1 - 8, cuando se carga en una disposición informática (156) .
10. Medio legible por ordenador, que comprende un producto de programa informático según la reivindicación 9.
11. Embarcación de dragado (120) , que comprende un tubo de succión (126) que en un punto de suspensión de tubo (136) está conectado por un cable (144) a un punto de suspensión de cables E en la embarcación de dragado (120) ,
caracterizado por el hecho de que la embarcación de dragado (120) comprende una fuente de radar (152) y un detector de radar (154) , donde la fuente de radar (152) está dispuesta para generar un campo de emisión de radar (202) dirigido sustancialmente al cable (144) , y donde el detector de radar (154) está dispuesto para recibir un campo de reflexión de radar (204) reflejado por el cable (144) , y donde la embarcación de dragado (120) comprende una disposición informática (156) configurada para determinar los parámetros cinemáticos Q del cable (144) del campo de reflexión de radar (204) .
12. Embarcación de dragado (120) según la reivindicación 11, donde la embarcación de dragado (120) dispone de medios para determinar una longitud de cable L entre el punto de suspensión de tubo (136) y el punto de suspensión de cables E, y donde la disposición informática (156) está configurada para determinar los parámetros cinemáticos Q a partir de la longitud de cable L además del campo de reflexión de radar (204) , y opcionalmente donde el tubo de succión (126) comprende al menos un goniómetro de tubo (138) para determinar un ángulo de inclinación X entre un eje de tubo longitudinal S1 del tubo de succión (126) y un eje de embarcación longitudinal S2 del casco de draga (122) , para el tubo de succión (126) en la posición de tubo inclinado, y donde la disposición informática (156) está configurada para determinar los parámetros cinemáticos Q a partir del ángulo de inclinación X además del campo de reflexión de radar (204) .
13. Embarcación de dragado (120) según cualquiera de las reivindicacione.
11. 12, donde el tubo de succión (126) comprende un sensor de presión (148) para medir una presión P cerca de una cabeza de succión (134) en un segundo extremo de tubo (132) del tubo de succión (126) , y donde la disposición informática (156) está configurada para calcular una profundidad de la cabeza de succión (134) y para determinar los parámetros cinemáticos Q a partir de la profundidad a partir del cálculo además del campo de reflexión de radar (204) .
14. Embarcación de dragado (120) según cualquiera de las reivindicacione.
11. 13, donde el detector de radar
(154) está provisto en una ubicación de embarcación (402) en la embarcación de dragado (120) , y donde la embarcación de dragado (120) comprende otro detector de radar (406) en otra ubicación de embarcación (404) diferente de la ubicación de embarcación (402) , donde el otro detector de radar (406) está dispuesto para recibir otro campo de reflexión de radar (408) reflejado por el cable (144) , y donde la disposición informática (156) está configurada para determinar los parámetros cinemáticos Q del campo de reflexión de radar (204) y el otro campo de reflexión de radar (408) .
15. Embarcación de dragado (120) según cualquiera de las reivindicacione.
11. 14, donde el tubo de succión (126) comprende una pluralidad de segmentos de tubo de succión, donde cada segmento de tubo de succión está interconectado rotativamente con un segmento de tubo de succión adyacente, y está en un punto de suspensión de 10 segmento de tubo respectivo conectado por un cable respectivo a un punto de suspensión de cables respectivo, la embarcación de dragado (120) que comprende fuentes de radar respectivo y detectores de radar respectivo, donde cada fuente de radar respectivo está dispuesta para generar un campo de emisión de radar dirigido sustancialmente al cable respectivo, y donde el detector de radar respectivo está dispuesto para recibir un campo de reflexión de radar reflejado por el cable respectivo, y donde la disposición informática (156) está configurada para determinar los parámetros cinemáticos Q' de un cable respectivo de cada segmento de tubo de succión posterior, empezando a partir de un primer segmento de tubo de succión que está en un primer extremo de tubo (130) conectado a un casco de draga (122) de la embarcación de dragado (120) .
Patentes similares o relacionadas:
 Soporte de pilote de anclaje, del 29 de Julio de 2020, de IHC Holland IE B.V: Sistema de pilote de anclaje para un buque de dragado con una dirección longitudinal, donde este sistema de pilote de anclaje comprende;
- un soporte de […]
Soporte de pilote de anclaje, del 29 de Julio de 2020, de IHC Holland IE B.V: Sistema de pilote de anclaje para un buque de dragado con una dirección longitudinal, donde este sistema de pilote de anclaje comprende;
- un soporte de […]
DISPOSITIVO LIMPIADOR DE FONDOS ACUÁTICOS, del 29 de Enero de 2020, de AQUATIC SWEEPER, S.L: 1. Dispositivo limpiador de fondos acuáticos, aplicable en la limpieza de fondos de construcciones artificiales, que comprende: un carro limpiafondos provisto […]
Brazo de guía posible de cambiar de lado para excavadora de succión, del 3 de Abril de 2019, de Braun, Alfons: Excavadora de succión para recoger materiales de succión, como la tierra de tuberías subterráneas o lodos, con una unidad de succión neumática para generar una […]
Caja de cambios para un buque de dragado, del 1 de Abril de 2019, de IHC Holland IE B.V: Buque de dragado por arrastre maniobrable que comprende; - un elemento de propulsión del buque acoplado a un eje de propulsión provisto […]
Dispositivo aspirador para masas de agua artificiales de gran tamaño, del 20 de Marzo de 2019, de CRYSTAL LAGOONS (CURACAO) B.V: Dispositivo aspirador para aspirar un volumen de agua de un fondo de masas de agua artificiales de gran tamaño, con superficies de más de 10.000 m2, sin sistemas de filtración […]
 Cabezal de succión para un buque de dragado y método para dragar usando dicho cabezal de succión, del 13 de Febrero de 2019, de Baggerwerken Decloedt en Zoon: Cabezal de succión para un buque de dragado, adaptado para moverse en una dirección de movimiento P, comprendiendo el cabezal de succión una construcción con […]
Cabezal de succión para un buque de dragado y método para dragar usando dicho cabezal de succión, del 13 de Febrero de 2019, de Baggerwerken Decloedt en Zoon: Cabezal de succión para un buque de dragado, adaptado para moverse en una dirección de movimiento P, comprendiendo el cabezal de succión una construcción con […]
Sistema para la limpieza de lodos heterogéneos depositados en instalaciones hidráulicas, del 2 de Enero de 2019, de CABEZAS CARBONERO, Juan Francisco: Sistema para la limpieza de lodos heterogéneos depositados en instalaciones hidráulicas. El sistema para la limpieza de lodos heterogéneos depositados en instalaciones hidráulicas […]
DISPOSITIVO LIMPIADOR DE FONDOS ACUÁTICOS., del 27 de Diciembre de 2018, de AQUATIC SWEEPER, S.L: Dispositivo limpiador de fondos acuáticos, aplicable en la limpieza de fondos de construcciones artificiales, que comprende: un carro limpiafondos […]