Instalación de pintado y procedimiento de funcionamiento correspondiente.
Instalación de pintado, en particular, para componentes alargados,
tales como, por ejemplo, parachoques devehículos automóviles, umbrales de puerta para vehículos automóviles o para componentes de aviones y turbinaseólicas, con
a) un recorrido de transporte (4) para transportar unos componentes (2) que hay que pintar a través de lainstalación de pintado,
b) un robot de pintado (13, 16) para pintar unos componentes (2), y
c) un recorrido de desplazamiento (12, 15) para posicionar el robot de pintado (13, 16) a lo largo del recorrido dedesplazamiento (12, 15), discurriendo el recorrido de desplazamiento (12, 15) del robot de pintado (13, 16)transversalmente con respecto al recorrido de transporte (4) para los componentes (2) que hay que pintar, asícomo
d) una cabina de pintado (1),
caracterizada porque
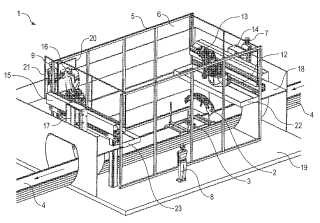
e) la cabina de pintado (1) presenta dos niveles (10, 11) superpuestos, es decir
e1) un nivel de servicio (10) inferior, en el cual el personal de servicio (8) puede hacer funcionar lainstalación de pintado con una plataforma (19) inferior para el nivel de servicio (10) inferior, sobre la cualpuede moverse el personal de servicio (8), y
e2) un nivel de mantenimiento (11) superior, en el cual el personal de mantenimiento (7, 9) puede realizar elmantenimiento de la instalación de pintado con una plataforma (18) superior para el nivel demantenimiento (11) superior, sobre la cual puede moverse el personal de mantenimiento (7, 9),
f) porque el recorrido de transporte (4) está dispuesto, junto con los componentes (2) que hay que pintar, en elnivel de servicio (10) inferior,
g) porque el recorrido de desplazamiento (12, 15) está dispuesto, con el robot de pintado (13, 16), en el nivel demantenimiento (11) superior.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/005920.
Solicitante: DURR SYSTEMS GMBH.
Nacionalidad solicitante: Alemania.
Dirección: CARL-BENZ-STR. 34 74321 BIETIGHEIM-BISSINGEN ALEMANIA.
Inventor/es: ESSLINGER, STEFAN, Ansorge,Helmut, ECKARDT,OLAF, BENKISER,JÜRGEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B05B13/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B05 PULVERIZACION O ATOMIZACION EN GENERAL; APLICACION DE MATERIALES FLUIDOS A SUPERFICIES, EN GENERAL. › B05B APARATOS DE PULVERIZACION; APARATOS DE ATOMIZACION; TOBERAS O BOQUILLAS (mezcladores de pulverización con toberas B01F 5/20; procedimientos para aplicar líquidos u otros materiales fluidos a superficies por pulverización B05D). › B05B 13/00 Máquinas o instalaciones para aplicar líquidos u otras materias fluidas sobre la superficie de objetos o de materiales por pulverización, no cubiertas por los grupos B05B 1/00 - B05B 11/00 (procedimientos para aplicar líquidos u otras materias fluidas a las superficies en general B05D; medios para suministrar o refluir un líquido u otro material fluido con este fin, ver el apropiado de entre los grupos B05B 1/00 - B05B 12/00). › las cabezas de pulverización se desplazan en el curso de la operación.
PDF original: ES-2437225_T3.pdf
Fragmento de la descripción:
Instalación de pintado y procedimiento de funcionamiento correspondiente.
La invención se refiere a una instalación de pintado para el pintado de componentes así como a un procedimiento de funcionamiento correspondiente según las reivindicaciones adjuntas, en particular para el pintado de componentes de plástico y preferentemente componentes alargados como, por ejemplo, parachoques de vehículo automóvil o umbrales de puerta.
En el pintado convencional de parachoques de vehículos automóviles (en inglés, “Bumper”) estos cuelgan usualmente en bastidores (en inglés, “Skids”) y se transportan con los bastidores, a lo largo de un recorrido de transporte lineal a través de la instalación de pintado, en una cabina de pintado, en la cual los parachoques de vehículos automóviles son pintados por un robot de pintado de varios ejes, el cual está dispuesto lateralmente junto al recorrido de transporte. Los parachoques de vehículos automóviles están orientados paralelamente con respecto al recorrido de transporte, de manera que el movimiento de pintado tiene lugar asimismo paralelamente con respecto al recorrido de transporte, para poder pintar los parachoques de vehículo automóvil en toda su longitud (“de oreja a oreja”) .
En las instalaciones de pintado conocidas descritas con anterioridad para el pintado de parachoques de vehículo automóvil es desventajoso en primer lugar el hecho de que los parachoques de vehículo automóvil que hay que pintar deben estar orientados en la cabina de pintado paralelos con respecto al recorrido de transporte, teniendo lugar el pintado en la dirección de la entrada o de la salida.
Durante el movimiento de pintado usual en la dirección de transporte de los parachoques de vehículo automóvil pueden acceder partículas de pintura (en inglés, “Overspray”) , a causa de su energía cinética, a zonas de pintado contiguas o similares y pueden originar allí contaminaciones indeseadas.
Esto se evita en las instalaciones de pintado usuales, por un lado, gracias a que las zonas contiguas en la dirección de transporte, como por ejemplo robots de pintado, estaciones de secador o estaciones de dotación, son dispuestas a una determinada distancia entre sí.
Las contaminaciones de este tipo entre cabinas de pintado contiguas se evitan, por otro lado, gracias a que en las cabinas de pintado individuales se ajusta en cada caso una velocidad de descenso vertical del aire suficiente.
Las cabinas de pintado deben presentar además, a causa del peligro de contaminación, una longitud mínima determinada en la dirección de transporte, con el fin de impedir las contaminaciones. Esto exige de nuevo cantidades de aire mayores para el funcionamiento de la cabina de pintado, lo que está relacionado con un consumo de energía aumentado.
Otra desventaja de las instalaciones de pintado para el pintado de parachoques de vehículo automóvil conocidos es el hecho de que los parachoques de vehículo automóvil no pueden ser pintados con frecuencia en toda su longitud (“de oreja a oreja”) .
Además, el personal de mantenimiento accede también a la cabina de pintado en las instalaciones de pintado para el pintado de parachoques de vehículos automóviles conocidas descritas con anterioridad de manera que la cabina de pintado no es una auténtica sala limpia. Este problema se agudiza además debido a que la técnica de aplicación utilizada (por ejemplo, pulverizador de rotación) tiene que ser mantenida aquí dentro de la cabina de pintado.
Otra desventaja de las instalaciones de pintado para el pintado de parachoques de vehículo automóvil conocidas descritas con anterioridad consiste en que los parachoques de vehículo automóvil tienen que ser girados y orientados en ángulo recto con respecto al recorrido de transporte, con el fin de reducir en una estación de secador posterior la longitud constructiva de la estación de secador. El giro de los parachoques de vehículo automóvil entre el pintado y el secado posterior exige, sin embargo, estaciones de giro complejas y ralentiza el proceso de pintado, dado que el giro de los parachoques de vehículo automóvil necesita un determinado tiempo.
Por el documento GB 2 263 422 se conoce una cabina de pintado las cual, sin embargo, no está subdividida en un nivel de mantenimiento superior y un nivel de pintado de servicio inferior. Más bien el personal de mantenimiento debe acceder, para realizar el mantenimiento de la instalación de pintado, a la cabina de pintado en el nivel del suelo, para poder llevar a cabo el mantenimiento. Aquí es desventajoso, por un lado, que al acceder a la cabina de pintado pueden ser arrastrados ensuciados al interior de la cabina de pintado, lo que puede conducir a un menoscabo del resultado de pintado. Por otro lado es difícil aquí el mantenimiento de los robots de pintado dispuestos elevados, de manera que el recorrido de desplazamiento transversal para los robots de pintado en el interior de la cabina de pintado debe estar situado tanto hacia abajo que los robots de pintado montados en el recorrido de desplazamiento transversal puedan ser alcanzados por el personal de mantenimiento.
Por el documento GB 2 246 963 se conoce además una cabina de pintado la cual no está subdividida asimismo verticalmente en un nivel de mantenimiento superior y un nivel de servicio o de pintado inferior.
La invención se plantea por ello el problema de mejorar correspondientemente las instalaciones de pintado usuales descritas al principio y los procedimientos de funcionamiento correspondientes.
Este problema se resuelve mediante la instalación de pintado según la invención y un procedimiento de funcionamiento correspondiente según las reivindicaciones adjuntas.
La invención comprende la enseñanza técnica general de orientar los componentes que hay que pintar, como por ejemplo parachoques de vehículo automóvil, en la cabina de pintado transversalmente con respecto al recorrido de transporte, de manera que el movimiento de pintado no tenga lugar – como en el estado de la técnica descrito al principio – de forma paralela con respecto al recorrido de transporte, sino transversalmente respecto de él. Esta orientación de los componentes que hay que pintar ofrece la ventaja de que se puede reducir la longitud constructiva necesaria de la cabina de pintado, dado que el componente alargado, como por ejemplo los parachoques de vehículo automóvil, necesitan menos espacio en la dirección de transporte en caso de orientación transversal según la invención.
La invención prevé además preferentemente que el robot de pintado se pueda desplazar, dentro de la cabina de pintado, a lo largo de un recorrido de desplazamiento designado también como eje de desplazamiento, estando orientado el recorrido de desplazamiento transversalmente con respecto al recorrido de transporte para los componentes que hay que pintar. En caso de un pintado de componentes alargados, como por ejemplo parachoques de vehículo automóvil, esta desplazabilidad del robot de pintado, transversalmente con respecto al recorrido de transporte y paralelamente con respecto a los componentes alargados, posibilita de forma ventajosa un pintado de los componentes en toda su longitud (“de oreja a oreja”) . En el caso del recorrido de desplazamiento para el robot de pintado se trata preferentemente de un recorrido de desplazamiento lineal el cual es orientado, preferentemente, en ángulo recto con respecto al recorrido de transporte. La invención no está limitada, sin embargo, a recorridos de desplazamiento lineales para el robot de pintado sino que comprende también, por ejemplo, disposiciones en las cuales el recorrido de desplazamiento está curvado, presenta bifurcaciones y/o está cerrado en forma de anillo. El concepto de recorrido de transporte lineal, utilizado en el marco de la invención, no significa por lo tanto que el recorrido de transporte sea exactamente recto. En la invención el recorrido de transporte lineal puede ser más bien también curvado.
Cabe mencionar además que el recorrido de desplazamiento con el robot de pintado está situado por encima del recorrido de transporte con los componentes que hay que pintar, con el fin de no bloquear el recorrido de transporte, de manera que los componentes que hay que pintar son transportados a través, a lo largo del recorrido de transporte, por debajo del recorrido de desplazamiento con el robot de pintado. La disposición del robot de pintado por encima de los componentes que hay que pintar ofrece también la ventaja de que se aumenta el rendimiento de aplicación y se reduce la cantidad de medio de revestimiento sobrante (en inglés, “Overspray”) dado que se pinta,... [Seguir leyendo]
Reivindicaciones:
1. Instalación de pintado, en particular, para componentes alargados, tales como, por ejemplo, parachoques de vehículos automóviles, umbrales de puerta para vehículos automóviles o para componentes de aviones y turbinas eólicas, con a) un recorrido de transporte (4) para transportar unos componentes (2) que hay que pintar a través de la instalación de pintado,
b) un robot de pintado (13, 16) para pintar unos componentes (2) , y
c) un recorrido de desplazamiento (12, 15) para posicionar el robot de pintado (13, 16) a lo largo del recorrido de desplazamiento (12, 15) , discurriendo el recorrido de desplazamiento (12, 15) del robot de pintado (13, 16) transversalmente con respecto al recorrido de transporte (4) para los componentes (2) que hay que pintar, así como d) una cabina de pintado (1) ,
caracterizada porque e) la cabina de pintado (1) presenta dos niveles (10, 11) superpuestos, es decir
e1) un nivel de servicio (10) inferior, en el cual el personal de servicio (8) puede hacer funcionar la instalación de pintado con una plataforma (19) inferior para el nivel de servicio (10) inferior, sobre la cual puede moverse el personal de servicio (8) , y
e2) un nivel de mantenimiento (11) superior, en el cual el personal de mantenimiento (7, 9) puede realizar el mantenimiento de la instalación de pintado con una plataforma (18) superior para el nivel de mantenimiento (11) superior, sobre la cual puede moverse el personal de mantenimiento (7, 9) ,
f) porque el recorrido de transporte (4) está dispuesto, junto con los componentes (2) que hay que pintar, en el nivel de servicio (10) inferior,
g) porque el recorrido de desplazamiento (12, 15) está dispuesto, con el robot de pintado (13, 16) , en el nivel de mantenimiento (11) superior.
2. Instalación de pintado según la reivindicación 1, caracterizada porque los componentes (2) que hay que pintar son alargados y están orientados transversalmente con respecto al recorrido de transporte (4) y/o paralelamente con respecto al recorrido de desplazamiento (12, 15) del robot de pintado (13, 16) .
3. Instalación de pintado según una de las reivindicaciones anteriores, caracterizada porque el recorrido de desplazamiento (12, 15) con el robot de pintado (13, 16) está dispuesto por encima del recorrido de transporte (4) con los componentes (2) que hay que pintar.
4. Instalación de pintado según una de las reivindicaciones anteriores, caracterizada porque el recorrido de transporte (4) y el recorrido de desplazamiento (12, 15) están orientados, respectivamente, de manera lineal y/o esencialmente en ángulo recto entre sí.
5. Instalación de pintado según una de las reivindicaciones anteriores, caracterizada porque presenta una cubeta colectora (22, 23) , la cual está dispuesta debajo del robot de pintado (13, 16) para proteger los componentes (2) que hay que pintar con respecto a un ensuciado desde arriba durante el recorrido de transporte (4) .
6. Instalación de pintado según una de las reivindicaciones anteriores, caracterizada porque el recorrido de transporte (4) discurre por debajo del robot de pintado (13, 16) en un túnel, para proteger los componentes (2) que hay que pintar en el recorrido de transporte (4) con respecto a un ensuciado desde arriba.
7. Instalación de pintado según una de las reivindicaciones anteriores, caracterizada porque el robot de pintado (13, 16) está dispuesto en una cabina de pintado (1) , estando el recorrido de desplazamiento (12, 15) con el robot de pintado (13, 16) dispuesto en la cabina de pintado (1) por el lado de entrada y/o por el lado de salida y/o entre ellos, en particular en posición central.
8. Instalación de pintado según una de las reivindicaciones anteriores, caracterizada porque el robot de pintado (13, 16) está dispuesto en una cabina de pintado (1) , la cual presenta una tapa de mantenimiento (20) que se puede cerrar, permitiendo la tapa de mantenimiento (20) , en el estado abierto, realizar el mantenimiento del robot de pintado (13, 16) .
9. Instalación de pintado según la reivindicación 8, caracterizada porque la tapa de mantenimiento (20) está dispuesta lateralmente en la cabina de pintado (1) y el recorrido de desplazamiento (12, 15) para el robot de pintado (13, 16) presenta una posición de mantenimiento, en la cual el robot de pintado (13, 16) es colindante con la tapa de mantenimiento (20) .
10. Instalación de pintado según la reivindicación 8 o 9, caracterizada porque el robot de pintado (13, 16) lleva un sistema de aplicación, en particular un aparato de aplicación o un cambiador de color, el cual puede ser mantenido por el robot de pintado (13, 16) fuera de la cabina de pintado (1) a través de la tapa de mantenimiento (20) abierta, para poder mantener el sistema de aplicación fuera de la cabina de pintado (1) .
11. Instalación de pintado según una de las reivindicaciones anteriores, caracterizada porque presenta una cabina de pintado (1) , a través de la cual pasa el recorrido de transporte (4) para los componentes (2) que hay que pintar, presentando el recorrido de desplazamiento (12, 15) para el robot de pintado una posición de pintado que se encuentra dentro de la cabina de pintado (1) y una posición de mantenimiento que se encuentra fuera de la cabina de pintado (1) .
12. Instalación de pintado según una de las reivindicaciones anteriores, caracterizada porque el armario de suministro (14, 17) para el robot de pintado (13, 16) está dispuesto en el nivel de mantenimiento (11) superior.
13. Instalación de pintado según una de las reivindicaciones anteriores, caracterizada porque presenta
a) una cabina de pintado (1) con unas paredes (6) y/o unas ventanas por lo menos parcialmente transparentes, y
b) por lo menos una plataforma (18, 19) transitable para el funcionamiento o mantenimiento, estando la plataforma (18, 19) montada lateralmente en la cabina de pintado (1) .
14. Instalación de pintado según la reivindicación 13, caracterizada porque dos plataformas (18, 19) transitables, superpuestas están montadas lateralmente en la cabina de pintado (1) .
15. Instalación de pintado según la reivindicación 14, caracterizada porque la plataforma (18, 19) se extiende
a) por encima de todo el perímetro de la cabina de pintado (1) o b) únicamente a lo largo de los lados longitudinales de la cabina de pintado (1) o c) únicamente a lo largo de los lados frontales de la cabina de pintado (1) .
16. Procedimiento de pintado, en particular para el pintado de componentes alargados, tales como, por ejemplo, parachoques de vehículos automóviles, umbrales de puerta para vehículos automóviles o para componentes de aviones y turbinas eólicas, que comprende las etapas siguientes:
a) transportar un componente (2) a lo largo de un recorrido de transporte (4) a través de una cabina de pintado (1) de una instalación de pintado,
b) pintar el componente (2) mediante un robot de pintado (13, 16) ,
c) desplazar el robot de pintado (13, 16) a lo largo de un recorrido de desplazamiento (12, 15) para posicionar el robot de pintado (13, 16) , siendo el robot de pintado (13, 16) transversalmente desplazado con respecto al recorrido de transporte (4) ,
caracterizado porque comprende las etapas siguientes:
d) hacer funcionar la instalación de pintado por el personal de servicio (8) en un nivel de servicio (10) inferior de la cabina de pintado (1) con una plataforma (19) inferior para el nivel de servicio (10) inferior, sobre la cual puede moverse el personal de servicio (8) , estando el recorrido de transporte (4) con los componentes (2) que hay que pintar dispuesto en el nivel de servicio (10) inferior,
e) realizar el mantenimiento de la instalación de pintado por el personal de mantenimiento (7, 9) en un nivel de mantenimiento (11) superior de la cabina de pintado (1) con una plataforma (18) superior para el nivel de mantenimiento (11) superior, sobre la cual puede moverse el personal de mantenimiento (7, 9) , estando el recorrido de desplazamiento (12, 15) con el robot de pintado (13, 16) dispuesto en el nivel de mantenimiento (11) superior.
17. Procedimiento de pintado según la reivindicación 16, caracterizado porque el robot de pintado (13, 16) está dispuesto por encima del componente (2) que hay que pintar.
18. Procedimiento de pintado según una de las reivindicaciones 16 a 17, caracterizado porque el recorrido de transporte (4) y el recorrido de desplazamiento (12, 15) están orientados, respectivamente, de manera lineal y/o esencialmente en ángulo recto entre sí.
19. Procedimiento de pintado según una de las reivindicaciones 16 a 18, caracterizado porque el “Overspray” o la suciedad procedente del robot de pintado (13, 16) es recogido por lo menos parcialmente por una cubeta colectora (22, 23) .
20. Procedimiento de pintado según una de las reivindicaciones 16 a 19, caracterizado porque los componentes que hay que pintar son transportados sobre el recorrido de transporte, por lo menos por debajo del robot de pintado en un túnel, para impedir un ensuciado por el robot de pintado que se encuentra situado por encima.
21. Procedimiento de pintado según una de las reivindicaciones 16 a 20, caracterizado porque el componente (2) que hay que pintar es alargado y, durante el transporte y el pintado y/o un secado posterior, está orientado transversalmente con respecto al recorrido de transporte (4) y esencialmente paralelo con respecto al recorrido de desplazamiento (12, 15) del robot de pintado (13, 16) .
22. Procedimiento de pintado según una de las reivindicaciones 16 a 21, caracterizado porque comprende la etapa siguiente:
transportar el componente (2) pintado hacia una estación de secador, para secar el componente (2) después del pintado, no siendo girado el componente (2) entre el pintado y el secado.
23. Procedimiento de pintado según una de las reivindicaciones 16 a 22, caracterizado porque el robot de pintado (13, 16) es desplazado durante el pintado a lo largo del recorrido de desplazamiento (12, 15) , para pintar el componente (2) en toda su longitud, pintando el robot de pintado (13, 16) preferentemente durante todo el movimiento.
24. Procedimiento de pintado según una de las reivindicaciones 16 a 23, caracterizado porque comprende la etapa siguiente:
realizar el mantenimiento del robot de pintado (13, 16) a través de una tapa de mantenimiento (20) que hay que abrir en una cabina de pintado (1) .
25. Procedimiento de pintado según una de las reivindicaciones 16 a 24, caracterizado porque comprende la etapa siguiente:
desplazar el robot de pintado (13, 16) a lo largo del recorrido de desplazamiento (12, 15) a una posición de mantenimiento, colindante a la tapa de mantenimiento (20) dentro de la cabina de pintado (1) o a una posición de mantenimiento que se encuentra fuera de la cabina de pintado (1) , para realizar el mantenimiento del robot de pintado (13, 16) .
26. Procedimiento de pintado según una de las reivindicaciones 24 o 25, caracterizado porque para realizar el mantenimiento, el robot de pintado (13, 16) mantiene un sistema de aplicación, en particular, un aparato de aplicación o un cambiador de color, montado en el robot de pintado (13, 16) , fuera de la cabina de pintado (1) a través de la tapa de mantenimiento (20) , de manera que el mantenimiento del sistema de aplicación sea realizado fuera de la cabina de pintado (1) .
Patentes similares o relacionadas:
Instalaciones para el tratamiento de superficie de objetos, del 8 de Julio de 2020, de Geico SPA: Instalación para tratar objetos en forma de carrocerías y/o componentes de vehículo, en particular para pintar por pulverización carrocerías […]
Procedimiento de pintura e instalación de pintura para pintar una decoración, del 24 de Junio de 2020, de Dürr Systems AG: Procedimiento de pintura para pintar un componente con una decoración , en particular para pintar un componente de carrocería de vehículo automóvil, […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Procedimiento de revestimiento e instalación de revestimiento correspondiente, del 18 de Marzo de 2020, de Dürr Systems AG: Procedimiento de revestimiento para revestir un componente con un agente de revestimiento, en particular para pintar componentes de carrocería de vehículos […]
Instalación de revestimiento y procedimiento de revestimiento correspondiente, del 18 de Diciembre de 2019, de Dürr Systems AG: Instalación de revestimiento, en particular instalación de pintado, para el revestimiento de componentes, en particular de componentes de carrocería de vehículos de motor, […]
Máquina para rociar pinturas o polvos sobre superficies de artículos, del 4 de Diciembre de 2019, de Maema S.R.L. Unipersonale: Una máquina para rociar pinturas o polvos (P) sobre superficies (S) de artículos de fabricación (M), que comprende: - primeros medios de guiado […]
ROBOT PARA REFORMAS Y REHABILITACIONES, del 17 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Robot para reformas y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros paralelos fijos, verticales o longitudinales, […]
ROBOT PARA REFORMAS Y REHABILITACIONES., del 10 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Robot para restauraciones y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros […]