PROCEDIMIENTO DE ENTRENAMIENTO DE REDES NEURONALES PARA DETECTORES CENTELLEADORES.
Procedimiento de entrenamiento de redes neuronales para detectores centelleadores.
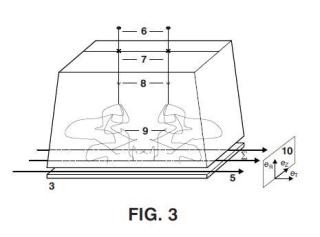
Procedimiento de entrenamiento de redes neuronales para detectores gamma formados por un cristal monolítico centelleador (1) con una cara de entrada y otra cara acoplada ópticamente a una matriz de fotodetectores (3), donde se coloca una fuente radiactiva (6) cerca de la cara de entrada del bloque y se desplaza la misma a lo largo de puntos preestablecidos para la adquisición de eventos en cada punto, donde los puntos están situados sobre líneas que forman una malla a una distancia determinada que permite reducir el tiempo de entrenamiento.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230941.
Solicitante: CENTRO DE INVESTIGACIONES ENERGETICAS, MEDIOAMBIENTALES Y TECNOLOGICAS (CIEMAT).
Nacionalidad solicitante: España.
Inventor/es: GARCIA DE ACILU LAÁ,Mª Paz.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06F17/00 FISICA. › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › Equipo o métodos de procesamiento de datos o de cálculo digital, especialmente adaptados para funciones específicas (recuperación de la información, estructuras de las bases de datos o estructuras de los sistemas de archivos G06F 16/00).
Fragmento de la descripción:
Procedimiento de entrenamiento de redes neuronales para detectores centelleadores
Sector de la técnica La siguiente invención pertenece al campo de física de detectores. En particular, la invención se refiere a un procedimiento de entrenamiento en tiempo reducido de redes neuronales utilizadas para localizar el punto de incidencia de un fotón gamma en un cristal centelleador monolítico.
Estado de la Técnica Los escáneres de tomografía por emisión de positrones (PET) están basados en la detección en coincidencia de dos fotones de aniquilación procedentes de una fuente de positrones, que previamente ha sido inoculada en el 15 paciente. Los positrones emitidos se frenan rápidamente y, en un punto cercano al de su creación, son aniquilados con electrones del medio, dando lugar a dos gammas de 511 keV que se emiten de manera antiparalela. Cuando uno de estos fotones alcanza un detector, éste lanza una señal de disparo. Si dentro un intervalo de tiempo previamente fijado por el usuario otro detector dispara, se dice que ha habido una coincidencia; dicho tiempo es la llamada ventana de coincidencias. Los dos bloques del anillo PET que han 20 registrado el evento determinan una Línea de Respuesta (LoR) que atraviesa, en ausencia de scattering, el punto de aniquilación. El conjunto de LoRs acumuladas proporciona la distribución de radionucleido en el cuerpo del paciente, permitiendo obtener imágenes funcionales del mismo. El sistema de detección puede ser de diversos tipos. El dispositivo más común consiste en pequeños cristales centelladores (NaI, LSO, LYSO, BGO…) llamados pixeles, cuya luz de centelleo es recogida por dispositivos fotodetectores (PMTs, APDs, SiPMs…) . En 25 este caso la posición de interacción de los fotones en el anillo está definida por el píxel en el que se produce la señal de disparo, y la resolución espacial depende directamente del tamaño del píxel. Una alternativa a estos cristales pixelados que ha ganado importancia en los últimos años es el uso de cristales monolíticos, continuos y de mayor tamaño, leídos por una matriz de fotosensores. Dicha opción presenta varias ventajas potenciales frente a los detectores segmentados, como por ejemplo el aumento de la sensibilidad del escáner (debido a la 30 disminución de espacios muertos entre cristales) , la reducción del número de canales de lectura y simplificación de la mecanización de los cristales, con el consecuente descenso del coste del dispositivo, o la posibilidad de obtener coordenadas continuas sobre el anillo detector. Por otra parte, con este tipo de bloques detectores la obtención de las coordenadas interacción de los fotones en el anillo deja de ser un procedimiento inmediato y es necesaria la implementación de algún tipo de algoritmo de posicionamiento. La distribución de fotones ópticos generada en el cristal contiene información sobre el punto de interacción del fotón de aniquilación en el bloque.
Dicha distribución es registrada por la matriz de fotodetectores y puede ser utilizada para calcular la LoR de diversas maneras. Una posibilidad es determinar independientemente el punto de interacción en el plano transversal (x, y) y la profundidad de interacción (DOI) . El primero puede estimarse mediante la proyección directa 40 de la posición calculada sobre el plano de los fotodetectores, bien utilizando fotodetectores a sensibles a la posición o bien procesando las señales posteriormente con algoritmos de posicionamiento. Para el cálculo de la DOI existen muchos métodos diferentes. Uno de ellos es el método “poswich”, que consiste en la utilización de capas de distintos cristales centelleadores, con respuestas temporales diferentes. Esa información se utiliza posteriormente para determinar en cual de los cristales interaccionó el fotón (US 6, 288, 399 B1) . Otra de las 45 aproximaciones más comunes es intercalar capas de centelleador con capas de un material absorbente, de modo que la cantidad de luz que alcanza el plano fotodetector proporciona información sobre la DOI (US 5, 122, 667 A) . También existen detectores que extraen la DOI a partir de la anchura de la distribución de luz que alcanza el plano fotodetector (ES 2, 239, 509 B1) o mediante una doble lectura (front-back) del cristal centelleador, calculando la profundidad a partir del ratio del luz entre ambas lecturas (US 6, 459, 085 B1) .
La otra posibilidad es estimar la posición de incidencia del fotón gamma sobre la superficie del cristal en lugar del punto de interacción del mismo dentro del centelleador. De este modo la LoR queda totalmente determinada sin necesidad de calcular la DOI (“Monolithic scintillator PET detectors with intrínsic depth-of-interaction correction”, Maas M., Phys. Med. Biol. vol. 54, pp. 1893-1908, 2009) . Sin embargo, el punto de entrada del gamma sobre la 55 superficie no puede extraerse directamente de las medidas de los fotodetectores si no se tiene además información sobre el ángulo de incidencia. En un escáner PET dicho ángulo puede ser aproximado por la posición relativa sobre el anillo de los dos bloques detectando en coincidencia. Esta última aproximación proporciona una resolución espacial equiparable a los métodos anteriores y simplifica notablemente la electrónica (y por tanto el coste) del dispositivo. Para extraer la posición de incidencia se necesitará implementar
un algoritmo que, en función del los valores medidos en el plano fotodetector y del ángulo que forman los bloques que detectan la coincidencia, nos proporcione para cada bloque las coordenadas (eT, eZ) sobre la superficie del mismo. Existen muchos algoritmos de posicionamiento que pueden ser utilizados a tal efecto. La mayoría de ellos se basan en la comparación de la distribución de luz medida para un evento desconocido con la generada en un conjunto eventos de referencia que fueron adquiridos en posiciones de incidencia conocidas.
Éste tipo de algoritmos son denominados métodos estadísticos. La posición de referencia cuya distribución es más parecida a la desconocida es elegida como posición de entrada. Métodos de este tipo son por ejemplo Least Square, Chi Square o Nearest Neighbors Comparison (“Performance Study of a PET Detector Module Based on a Continuous Scintillator”, Bruyndonckx P., IEEE Trans. Nucl. Sci. Vol. 53 No.5 2006) .
Otra posibilidad es ajustar una función que, teniendo como datos de entrada los valores medidos por los fotosensores, proporcione como salida los valores de las coordenadas de entrada del gamma. Este es el principio en el que se fundamentan los algoritmos de posicionamiento basados en redes neuronales (NN) . Dado que las distribuciones de fotones ópticos generadas son diferentes para gammas incidentes en el mismo punto pero con distinto ángulo, se necesitan múltiples redes neuronales para cada bloque. Cada red se entrena para ser usada con fotones con un ángulo de incidencia particular, y por tanto debe ser entrenada con un conjunto de eventos adquiridos en posiciones conocidas sobre el bloque y con el ángulo incidencia correspondiente. Una implementación razonable de este sistema, que simplifica la lectura de los fotodetectores y la estructura de la red es calcular independientemente las coordenadas eT y eZ. Para ello se realiza la suma por filas y por columnas de la señal proporcionada por los fotodetectores. De este modo se obtiene una señal única de cada fila/columna, que se preamplifica y digitaliza para convertirla en un valor numérico que proporciona la información de la cantidad de luz recogida en dicha fila/columna. La información de la distribución de luz queda por tanto recogida en (n+m) valores numéricos para cada evento, que representan la cantidad de fotones medidos por las n filas y m columnas. Así las entradas de la red neuronal, y el número de canales electrónicos, pasan de ser n·m a n+m
para cada evento, reduciéndose de este modo el número de entradas de la red neuronal y el número de canales electrónicos (WO2009/150235 A2; “Neural Network-Based Position Estimators for PET Detectors Using Monolithic LSO Blocks”, Bruyndoncks P., IEEE Trans. Nucl. Sci. Vol.51 No.5 2004) Las redes neuronales presentan un ventaja importante frente a los citados métodos estadísticos y es que, una vez entrenadas, proporcionan la posición de forma directa, mientras que los métodos estadísticos tienen que realizar la comparación completa con el conjunto de eventos de referencia en cada uno de los casos. Así pues, las redes neuronales constituyen una solución muy prometedora si se encuentra un método óptimo para la adquisición de sus eventos de entrenamiento que permita su aplicación a gran escala, ya que un escáner completo necesita un número de redes muy elevado.
El método tradicional...
Reivindicaciones:
1. Procedimiento de adquisición de eventos para el entrenamiento de redes neuronales para detectores gamma formados por un cristal monolítico centelleador (1) con una cara de entrada y otra cara acoplada ópticamente a una matriz de fotodetectores (3) , donde se coloca al menos una fuente radiactiva (6) cerca de la cara de entrada del bloque y se desplaza la misma a lo largo de puntos preestablecidos para la adquisición de eventos de entrenamiento en cada punto, caracterizado porque los puntos están situados sobre líneas que forman una malla sobre la superficie, con una separación constante entre líneas, con un valor de entre 0, 2 y 0, 9 líneas por unidad
de longitud expresada en mm de la cara y donde la separación entre puntos de cada línea es de 1 mm.
FIG. 1
FIG. 2
FIG. 3
FIG. 4
FIG. 5a
FIG. 5b
Líneas de entrenamiento por unidad de longitud (líneas/mm)
FIG. 6
Patentes similares o relacionadas:
SISTEMA DE PREPARACIÓN DE ALIMENTOS, del 2 de Junio de 2020, de BSH ELECTRODOMESTICOS ESPAÑA S.A.: Sistema de preparación de alimentos. La presente invención hace referencia a un sistema de preparación de alimentos (10a) con al menos una unidad […]
MÉTODO PARA CONSTRUCCIÓN DE SISTEMA DE PROTECCIÓN SOLAR PARA FACHADAS DE EDIFICIOS, del 28 de Mayo de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: La presente invención se relaciona con un método para producir un sistema de protección solar en fachada de edificio que comprende las siguientes etapas, […]
SISTEMA DE PREPARACIÓN DE ALIMENTOS, del 27 de Mayo de 2020, de BSH ELECTRODOMESTICOS ESPAÑA S.A.: Sistema de preparación de alimentos. La presente invención hace referencia a un sistema de preparación de alimentos (10a) con al menos una […]
Sistemas, métodos e interfaces para proporcionar versiones de libros electrónicos dentro de un dispositivo de acceso, del 27 de Mayo de 2020, de Thomson Reuters Enterprise Centre GmbH: Un dispositivo de acceso que comprende: a. un procesador ; b. una memoria acoplada al procesador ; y c. un programa de software de […]
SISTEMA DE PREPARACIÓN DE ALIMENTOS, del 27 de Mayo de 2020, de BSH ELECTRODOMESTICOS ESPAÑA S.A.: Sistema de preparación de alimentos. La presente invención hace referencia a un sistema de preparación de alimentos (10a) con al menos una unidad […]
CONFIGURACIÓN Y VISUALIZACIÓN DE UNA INTERFAZ DE USUARIO CON ESTUDIOS DE ATENCIÓN SANITARIA, del 22 de Mayo de 2020, de FUJIFILM MEDICAL SYSTEMS USA INC: Configuración y visualización de una interfaz de usuario con estudios de atención sanitaria. Método y aparato para configurar y visualizar una interfaz de […]
Sistema y procedimiento de control de calidad de platos preparados, del 14 de Mayo de 2020, de BEABLOO, S.L: Sistema y procedimiento de control de calidad de platos preparados. El sistema comprende medios de detección para detectar los ingredientes […]
Método para establecer un ángulo de conformación para un producto conformado tridimensional, del 15 de Abril de 2020, de MATSUURA MACHINERY CORPORATION: Un método para establecer ángulos de conformación en un método de conformación para un producto conformado tridimensional que tiene una región de corte […]