Controlador quirúrgico en ángulo.
Un controlador quirúrgico en ángulo, que comprende:
un primer miembro giratorio,
que gira con respecto a un primer eje;
un segundo miembro giratorio, que gira con respecto a un segundo eje y que está asociado angularmente condicho primer miembro giratorio;
una carcasa en ángulo, conectada, con posibilidad de giro, a dicho primer miembro giratorio y a dichosegundo miembro giratorio; y
una pluralidad de pasadores que conectan, de forma controlada, dicho primer miembro giratorio a dichosegundo miembro giratorio, ninguno de dicha pluralidad de pasadores estando centrados en ambos dichoprimer y dicho segundo ejes;
caracterizado porque mediante dicha carcasa en ángulo se define dicho primer eje giratorio y dicho segundoeje giratorio.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07005273.
Solicitante: SYMMETRY MEDICAL, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 220 WEST MARKET STREET WARSAW, IN 46580 ESTADOS UNIDOS DE AMERICA.
Inventor/es: WOLFORD,TODD A, NORDMAN,MARK, GAREISS,WARREN S.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/16 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Osteotomos; Taladros o cizallas para huesos; Trépanos.
- A61B17/88 A61B 17/00 […] › Medios o procedimientos para implantar o extraer los dispositivos de fijación interna.
- B25B23/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25B HERRAMIENTAS O UTILLAJE DE BANCO NO PREVISTOS EN OTRO LUGAR, PARA FIJAR, UNIR, DESENGANCHAR O MANTENER. › Partes constitutivas o accesorios de llaves para tuercas, llaves inglesas, destornilladores (tensores de pernos B25B 29/02).
PDF original: ES-2443692_T3.pdf
Fragmento de la descripción:
Controlador quirúrgico en ángulo
ANTECEDENTES DE LA INVENCIÓN
1. Campo de la invención
La presente invención se refiere a un controlador quirúrgico, más particularmente, a un controlador quirúrgico en ángulo.
2. Descripción del estado de la técnica relacionado
La cirugía de reemplazo de articulaciones ha sido utilizada en los Estados Unidos desde antes de los 60. El implante o la reparación de una envoltura acetabular empleando un proceso de cirugía mínimamente invasiva requiere conexiones de orificios roscados y tornillos, los cuales deben ser atornillados en una envoltura acetabular. Los tornillos de los huesos son, a menudo, conducidos a través de orificios roscados en la envoltura acetabular y dentro del hueso cortical circundante, para fijar la envoltura al hueso. Las aberturas de los orificios roscados en la envoltura acetabular están, generalmente, formando un ángulo con respecto al lugar de cirugía, lo cual, a menudo, imposibilita que un instrumento conductor recto tenga el ángulo adecuado para alcanzar la abertura del orificio roscado en la envoltura.
Las técnicas quirúrgicas mínimamente invasivas tienen la ventaja de reducir el trauma del tejido que rodea al lugar de cirugía durante un proceso quirúrgico. A menudo se requiere una fresa para preparar un lugar de implante para la recepción de la envoltura acetabular, la fresa está conectada a un controlador, el cual a su vez está conectado a una herramienta rotatoria. El controlador tiene una estructura específica en el extremo proximal (al lugar de cirugía) del mismo, el cual es compatible con mecanismos de fijación específicos en las fresas.
Un conjunto fresador ortopédico, el cual incluye un controlador, puede ser empleado también para conformar una superficie exterior de un hueso. Una herramienta rotatoria proporciona una fuerza motriz y está conectada al controlador, el cual está conectado a la fresa. El controlador, de forma general, tiene un eje y un extremo conductor. Los controladores de fresa ortopédicos se sabe que tienen un eje flexible. El eje flexible permite a la fresa desplazarse a lo largo de la trayectoria de un pasaje no lineal, tal como un canal intramedular, y por consiguiente fresar una abertura no lineal.
Es conocido tener un cuerpo controlador con barras de conexión, en forma de “L”, montado entre un cuerpo controlador y un cuerpo controlador con múltiples barras de control, en forma de “L”, montadas entre los mismos. El cuerpo controlador tiene un orificio central de conexión con orificios de montaje múltiples dispuestos alrededor de una periferia de un orificio de conexión. Como se describe en la publicación de la solicitud de patente de Estados Unidos No. US2004/0045417 A1.
Lo que se necesita en el estado de la técnica es un mecanismo controlador que no requiera un pasador de conexión central.
RESUMEN DE LA INVENCION
La presente invención proporciona un controlador quirúrgico en ángulo conducido mediante pasador.
La invención comprende, en una forma de la misma, un controlador quirúrgico angular que incluye un primer miembro giratorio, un segundo miembro giratorio, una carcasa en ángulo y una pluralidad de pasadores. El primer miembro giratorio y el segundo miembro giratorio están asociados angularmente uno con respecto al otro. La carcasa en ángulo está conectada, con posibilidad de giro, al primer miembro giratorio y al segundo miembro giratorio. Una pluralidad de pasadores conecta, de forma controlada, el primer miembro giratorio al segundo miembro giratorio.
Una ventaja de la presente invención es que no hay un pasador de colocación/conexión central.
Otra ventaja de la presente invención es que cada uno de los pasadores utilizados son pasadores conducidos, los cuales transfieren la fuerza desde un primer árbol a un segundo árbol.
Otra ventaja más de la presente invención es que la carcasa en ángulo define el ángulo de giro entre los dos árboles giratorios.
BREVE DESCRIPCION DE LOS DIBUJOS
Lo anteriormente mencionado y otras características y ventajas de la invención, y la manera de llevarlos a cabo, serán más evidentes y la invención será mejor entendida mediante la referencia a la siguiente descripción de un modo de realización de la invención tomado en conjunción con los dibujos que acompañan, en donde:
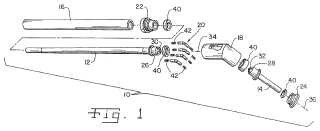
La figura 1 ilustra una vista en perspectiva de despiece de un modo de realización del controlador quirúrgico de la presente invención.
La figura 2 muestra el controlador quirúrgico ensamblador de la figura 1.
La figura 3 es una vista seccionada de un montaje de pasador del controlador quirúrgico de las figuras 1 y 2, y.
La figura 4 es una vista seccionada parcialmente del montaje de pasador del controlador quirúrgico de las figuras 1 a 3.
Los caracteres de referencia correspondientes indican partes correspondientes durante las distintas vistas. La ejemplificación establecida aquí ilustra un modo de realización preferido de la invención, en una forma, y dicha ejemplificación no es para estar constituida como una limitación del ámbito de la invención de ninguna manera.
DESCRIPCION DETALLADA DE LA INVENCION
Con referencia ahora a los dibujos, y más particularmente a las figuras 1-4, cero muestra un controlador quirúrgico 10 que incluye un árbol 12, un árbol 14, una camisa 16, una carcasa en ángulo 18, pasadores 20, y anillos de retención 22 Y 24. El árbol 12 gira con respecto a un eje 34 y el árbol 14 gira con respecto a un eje 36. La camisa 16 rodea al árbol 12 en una longitud sustancial del árbol 12. La camisa 16 está conectada a la carcasa en ángulo 18 y proporciona una superficie no giratoria que puede ser empuñada por un cirujano, mientras que el árbol 12 gira allí dentro. En beneficio de la claridad, se han omitido las características de fijación en el extremo distal del árbol 14. Dichas características permiten una fijación de dispositivos de corte, de taladrado, de fresado y de control al árbol
14.
Los pasadores 20 tienen un ángulo el cual es proporcional al ángulo de la carcasa en ángulo 18. Los pasadores 20 son generalmente cilíndricos, por naturaleza, estando doblados en aproximadamente un punto medio de los mismos. El árbol 12 tiene un saliente 26 con orificios 30 dentro del mismo. El árbol 14 tiene un saliente 28 con orificios 32 dentro del mismo. Los orificios 30 y 32 están dispuestos alrededor de un perímetro separado de los ejes 34 y 36 respectivamente. Los orificios 30 y 32 están separados una distancia predeterminada desde los ejes 34 y 36 respectivamente. Los pasadores 20 están dispuestos para deslizarse dentro de los orificios 30 y 32 cuando los árboles 12 y 14 son ensamblados en la carcasa en ángulo 18. Los pasadores 20 son solamente retenidos en el conjunto debido a que los ejes 12 y 14 están obligados a girar a un ángulo y distancia fijados entre sí determinados por la carcasa en ángulo 18. Una fuente de alimentación giratoria 38 se conecta al árbol 12 provocando el giro del árbol 12 con potencia que es transferida mediante los pasadores 20 al árbol 14. Se sitúan muelles 42 en los orificios 30 y 32 para controlar el movimiento de los pasadores 20. Los muelles 42 están comprimidos cuando los pasadores 20 se mueven dentro de los orificios 30 y 32, y se expanden cuando los pasadores 20 se extienden dentro de los orificios 30 y 32. Los muelles 42 hacen que los pasadores 20 se desvíen, de forma sustancial, igualmente lejos de los árboles 12 y 14. Los muelles 42 conducen la rotación suave de los árboles 12 y 14, provocando que los pasadores 20 se extiendan de forma equidistante en los orificios 30 y 32 cuando giran los ejes 12 y 14.
La presencia de una carcasa en ángulo 18 evita la necesidad de cualquier pasador central retenido, el cual estaría situado en los ejes 34 y 36. Esto, de forma ventajosa, permite que los pasadores 20 estén separados sin que afecte la situación de un orificio central y de un pasador de retención en el conjunto.
Los anillos de retención 22 y 24 están conectados mediante rosca con la carcasa en ángulo 18 y sirven para colocar los saliente 26 y 28 respectivamente, en la carcasa en ángulo 18 y definen el eje con respecto al cual giran los árboles 12 y 14. Los pasadores 20 se insertan primero dentro de cualquiera de los dos orificios 30 o 32, que son después insertados dentro de la carcasa en ángulo 18, teniendo entonces un anillo de retención apropiado 22 o 24, enroscado dentro de la carcasa en ángulo 18. Los pasadores 20 están entonces alineados e insertados dentro de los orificios 30 o 32, los cuales permanecen para ser ocupados cuando el árbol restante es insertado dentro de la carcasa... [Seguir leyendo]
Reivindicaciones:
1. Un controlador quirúrgico en ángulo, que comprende:
un primer miembro giratorio, que gira con respecto a un primer eje; un segundo miembro giratorio, que gira con respecto a un segundo eje y que está asociado angularmente con dicho primer miembro giratorio; una carcasa en ángulo, conectada, con posibilidad de giro, a dicho primer miembro giratorio y a dicho segundo miembro giratorio; y una pluralidad de pasadores que conectan, de forma controlada, dicho primer miembro giratorio a dicho segundo miembro giratorio, ninguno de dicha pluralidad de pasadores estando centrados en ambos dicho primer y dicho segundo ejes; caracterizado porque mediante dicha carcasa en ángulo se define dicho primer eje giratorio y dicho segundo eje giratorio.
2. El controlador quirúrgico en ángulo de la reivindicación 1, en donde cada uno de dicha pluralidad de pasadores incluye un recodo angulado.
3. El controlador quirúrgico en ángulo de la reivindicación 1, en donde dicha pluralidad de pasadores están asociados, con posibilidad de deslizamiento, tanto con dicho primer miembro giratorio como con dicho segundo miembro giratorio.
4. El controlador quirúrgico en ángulo de la reivindicación 3, que además comprende una pluralidad de muelles que incluyen un primer muelle y un segundo muelle, incluyendo dicha pluralidad de pasadores un primer pasador que tiene un primer extremo y un segundo extremo, dicho primer muelle desviando a dicho primer extremo en una dirección lejos de dicho primer miembro giratorio, dicho segundo muelle desviando a dicho segundo extremo en una dirección lejos de dicho segundo miembro giratorio.
5. El controlador quirúrgico en ángulo de la reivindicación 2, en donde dicha pluralidad de pasadores son cilíndricos con dicho recodo angulado próximo a la sección media de cada uno de dichos pasadores.
6. El controlador quirúrgico en ángulo de la reivindicación 1, que además comprende un anillo que es retirable de dicha carcasa en ángulo, teniendo dicho anillo una abertura axial a través de la cual pasa una porción de dicho primer miembro giratorio.
7. El controlador quirúrgico en ángulo de la reivindicación 6, en donde dicho anillo retiene a dicho primer miembro giratorio en dicha carcasa en ángulo.
8. El controlador quirúrgico en ángulo de la reivindicación 7, en donde dicho anillo está conectado mediante rosca con dicha carcasa en ángulo.
9. El controlador quirúrgico en ángulo de la reivindicación 8, que además comprende otro anillo sustancialmente similar a dicha anillo, dicho otro anillo reteniendo dicho segundo miembro giratorio en dicha carcasa en ángulo.
Patentes similares o relacionadas:
Mango médico con acoplamiento de seguridad neumático, del 22 de Julio de 2020, de AESCULAP AG: Mango médico para instrumentos médicos accionados hidráulica o neumáticamente con una parte de acoplamiento por el lado del mango para […]
Instrumento quirúrgico de mano, y una herramienta y un dispositivo de protección, del 15 de Julio de 2020, de Zastrow, Frank: Dispositivo quirúrgico dental de mano con una herramienta móvil , en donde se forma una zona de trabajo en un extremo distal de la herramienta y en donde […]
Sistema para preparar la tibia de un paciente en un procedimiento de reemplazo de articulación ortopédica, del 15 de Julio de 2020, de DePuy Ireland Unlimited Company: Un sistema de instrumentos quirúrgicos ortopédicos que comprende: un escariador quirúrgico que incluye un eje alargado y una pluralidad de estrías de […]
Herramienta de autoinjerto con un perfil acanalado mejorado y procedimientos de uso, del 1 de Julio de 2020, de HUWAIS IP HOLDING LLC: Un osteótomo giratorio , que comprende: una espiga que establece un eje longitudinal de rotación; un cuerpo que se extiende desde dicha espiga […]
Aparato para biopsia y aspiración de médula ósea, del 10 de Junio de 2020, de Teleflex Medical Devices S.à.r.l: Un conjunto acoplador que puede hacerse funcionar para enganchar de manera liberable un extremo de un árbol de accionamiento que se extiende […]
Fresa quirúrgica con depresiones no emparejadas, del 13 de Mayo de 2020, de MEDTRONIC PS MEDICAL, INC: Una herramienta de diseccion quirurgica para cortar hueso y otros tejidos, que comprende: - un vastago ; y - un cabezal de corte que se […]
Dispositivo de fresado quirúrgico de contra-ángulo para fresado óseo evitando daños a tejidos blandos, del 13 de Mayo de 2020, de BIEN-AIR HOLDING SA: Dispositivo de fresado quirúrgico para fresado de huesos, que comprende un cabezal de una pieza de mano que puede accionarse, directa o bien indirectamente, […]
Sistema de lubricación y escape para un instrumento quirúrgico motorizado, del 13 de Mayo de 2020, de MEDTRONIC XOMED, INC.: Un sistema de lubricación para instrumentos quirúrgicos que comprende: un cartucho de lubricación ; un vástago que define una trayectoria primaria […]