Aparato basado en ultrasonidos para controlar uno o más parámetros.
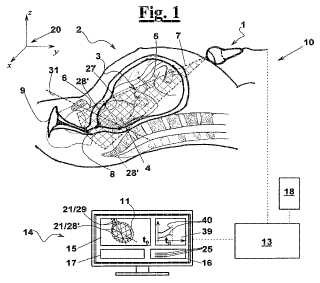
Un aparato (10) para medir un parámetro de progresión del parto,
durante el alumbramiento, con la ayuda deimágenes ultrasónicas obtenidas mediante impulsos ultrasónicos, comprendiendo dicho aparato (10):
una sonda ultrasónica;
un medio de fijación para fijar dicha sonda ultrasónica (1) en el cuerpo de una parturienta (2) de modo que dichasonda (1) tenga un campo visual (7) que comprende una parte del cuerpo de dicha parturienta (2) y de un feto (3),en particular, el canal endocervical (8) o el pubis de la parturienta (2);
una unidad de control (13) para recibir y analizar señales emitidas desde dicha sonda ultrasónica (1), cuya unidad decontrol (13) crea o recibe como entrada de dicha sonda una imagen ultrasónica de referencia (11) Y varias imágenesultrasónicas subsiguientes (12), tomadas sucesivamente después de dicha imagen ultrasónica de referencia (11);una interfaz de usuario (14) para seleccionar una zona de interés (21) en dicha imagen ultrasónica de referencia (11)por un operador, estando la interfaz de usuario (14) adaptada para seleccionar dicha zona de interés (21)esencialmente centrada alrededor de dicha parte del cuerpo de la parturienta, comprendiendo dicha zona de interés(21) una pluralidad pixels (23);
cuya unidad de control (13) comprende:
un medio de seguimiento automático con el fin de seguir dicha zona de interés (21), estando dicho medio deseguimiento automático diseñado para identificar zonas de interés derivadas (22) en las imágenes elegidas entre lasvarias imágenes ultrasónicas subsiguientes (12), estando dichas zonas de interés derivadas (22) de dicha zona deinterés (21) elegida en dicha imagen ultrasónica de referencia (11), comprendiendo dicho medio de seguimiento:un medio para calcular una función de pixel local predeterminada para cada pixel (23) o grupo de pixels de dichazona de interés (21) en dicha imagen ultrasónica de referencia (11) Y en cada imagen elegida entre dichas variasimágenes ultrasónicas subsiguientes (12);
un medio para calcular, de forma iterativa, a partir de dicha imagen ultrasónica de referencia (11), la posición dedicha zona de interés derivada (22) en cada imagen elegida, estando dicho medio de cálculo iterativo diseñado paraefectuar comparaciones entre:
valores de dicha función de pixel local calculada para los pixels (23) de dicha zona de interés (21) de una imagenentre las imágenes elegidas;@
valores de dicha función de pixel local calculados en pixels de dicha zona de interés (22) de una imagen ultrasónicasubsiguiente (12);
un medio para comparar cada posición de dicha zona de interés derivada (22) con la posición de dicha zona deinterés (21) dentro de dicha imagen ultrasónica de referencia (11) o dentro de otra imagen de entre dichas imágeneselegidas y para calcular un parámetro de progresión del parto.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/008321.
Solicitante: CNR CONSIGLIO NAZIONALE DELLE RICERCHE.
Nacionalidad solicitante: Italia.
Dirección: PIAZZALE ALDO MORO, 7 00185 ROMA ITALIA.
Inventor/es: CASCIARO,SERGIO, CASCIARO,ERNESTO, CONVERSANO,FRANCESCO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B5/107 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Medida de dimensiones corporales, p. ej. la talla del cuerpo entero o de partes del mismo.
- A61B8/08 A61B […] › A61B 8/00 Diagnóstico utilizando ondas ultrasónicas, sónicas o infrasónicas. › Detección de movimientos o de modificaciones orgánicas, p. ej. tumores, quistes, inflamaciones (A61B 8/02 - A61B 8/06 tienen prioridad).
PDF original: ES-2419384_T3.pdf
Fragmento de la descripción:
CAMPO DE LA INVENCiÓN
La presente invención se refiere a un aparato basado en ultrasonidos para controlar uno o más parámetros morfológicos y fisiológicos que están relacionados con la progresión de un parto.
ANTECEDENTES DE LA INVENCiÓN
Se tiene necesidad, en particular, de un método y un equipo que permitan controlar las condiciones de una mujer parturienta y de su feto antes de entrar en la sala de partos y durante el propio parto, en particular, en la etapa del parto 2, pero incluso en las etapas 1 y 3. En particular, es importante comprobar dichos parámetros morfológicos y fisiológicos tales como intensidad, frecuencia y duración de las contracciones uterinas, frecuencia cardiaca fetal , dilatación del canal endocervical, la longitud del canal endocervical, la posición presentada de la cabeza fetal, en particular la distancia desde la cabeza fetal respecto a una referencia anatómica, tal como el orificio externo uterino, el pubis y elemento similar de la parturienta así como la rotación de la cabeza fetal, el desenrollamiento del cordón umbilical y la evolución de todos estos parámetros.
Varias técnicas son conocidas para evaluar la inminencia del parto y controlar la progresión del parto. Estos métodos proporcionan la introducción de un dedo del operador y/o objetos tales como sensores y/o instrumentos en el interior de la vagina, para alcanzar la cervice uterina o la cabeza del feto. Estas técnicas invasivas pueden dar lugar también a infecciones y/o lesiones de la parturienta y/o del feto.
Además, en la mayoría de los casos, la exactitud de los datos, que pueden obtenerse, depende de la sensibilidad del operador, por lo que no se puede garantizar la objetividad y precisión de la medición. Para superar este problema, se han desarrollado dispositivos de ultrasonidos tales como el cervicómetro de Bamev, descrito en el documento de Sharf et al., "Control continuo de la dilatación cervical y posición de la parte presentada de la cabeza fetal durante el parto" (Med. Eng. Phys. 2007; 29: 61-71) . El cervicómetro de Bamev comprende tres transmisores ultrasónicos a situarse en el abdomen de la mujer parturienta y una pluralidad de receptores a situarse, en condiciones normales, sobre la cabeza fetal y en los bordes del orificio del cuello uterino. El análisis del tiempo de respuesta de las sondas, y una posterior triangulación de la distancia obtenida de esta manera, permiten evaluar, de forma unívoca, la dilatación del canal endocervical y la posición del feto. Sin embargo, este dispositivo sigue siendo un dispositivo invasivo así como los dispositivos y los métodos descritos en el documento Sharf et al.; "Control continuo de la dilatación cervical y de la reacción fetal durante el parto"Medical Engineering & Physics 29 (2007) 61-71, en "Nuevas tecnologías para terapias mínimamente invasivas", Lupensis Biomedical Publications, así como en los documentos WO 199849942, WO 2008084486 y WO 2005015499. A parte de las molestias que pueden producir a la mujer parturienta estas técnicas sólo pueden emplearse si la mujer mantiene una posición tumbada.
Además, el operador debe mantener la sonda ultrasónica y ajustar continuamente su posición sobre el abdomen de la mujer.
Además, solamente un número limitado de parámetros pueden visualizarse y controlarse al mismo tiempo, normalmente no más de dos, por medio de equipos conocidos.
En el documento US 20030114779, se da a conocer un método de control de la progresión del parto en una madre, durante el alumbramiento. El método se realiza utilizando un sensor de posición para medir un punto predeterminado en la madre controlando la localización del sensor de posición en un espacio tridimensional y controlando la localización de la parte de presentación fetal con respecto al punto predeterminado en la madre.
El documento US 20030114779 da a conocer un aparato para medir un parámetro de progresión del parto mediante imágenes ecográficas obtenidas por pulsos ultrasónicos, en donde las imágenes incluyen una serie de imágenes que muestran la dilatación progresiva, en donde una de las imágenes puede describirse como una imagen de referencia y una unidad de control para recibir y analizar señales desde dicha sonda ecográfica y en donde el usuario puede marcar puntos seleccionados, que pueden describirse como zonas de interés, en las imágenes visualizadas y de este modo, permite el cálculo y control de la distancia espacial entre el BPD y la cabeza y en donde el sensor ultrasónico tiene sensores de posición incorporados.
SUMARIO DE LA INVENCiÓN
Por lo tanto, es un objetivo de la invención dar a conocer un aparato para medir los parámetros morfológicos que permiten controlar la progresión de un parto, tal como, en particular, la dilatación del canal endocervical de una mujer parturienta, la posición del feto antes y durante el descenso a través del canal endocervical así como los parámetros fisiológicos de la parturienta y del feto, sin requerir la introducción de ningún objeto extraño en el cuerpo de la mujer.
Además, es un objetivo de la invención dar a conocer un aparato para el control en tiempo real de dichos parámetros, mediante su visualización cualitativa y/o cuantitativa en una interfaz de usuario.
Otro objetivo de la invención es dar a conocer un aparato que permite la medición automática de dichos parámetros.
Otro objetivo de la invención es dar a conocer un aparato que permite la medición objetiva de dichos parámetros, esto es, con independencia de la sensibilidad y de los conocimientos del operador.
Es un objetivo particular de la invención dar a conocer dicho aparato para controlar, al mismo tiempo, varios parámetros morfológicos y fisiológicos según se desee por el operador.
Es otro objetivo particular de la invención dar a conocer un aparato que permite a la parturienta asumir cualquier posición deseada durante el alumbramiento, a modo de ejemplo, una posición de pie o sentada, así como una posición tumbada.
Estos y otros objetivos se consiguen mediante un aparato para medir un parámetro de progresión del parto, durante el alumbramiento, mediante imágenes ultrasónicas obtenidas por un pulso ultrasónico según se define en la reivindicación 1.
Los medios de seguimiento automático permiten el seguimiento, prácticamente en tiempo real y con un nivel de exactitud predeterminado, antes y durante el alumbramiento, de uno o más parámetros morfológicos y fisiológicos del parto, que están relacionados con la progresión del alumbramiento y que permiten evaluar la evolución correcta del propio alumbramiento, sin insertar en el cuerpo de la mujer objetos extraños, tales como sensores e instrumentos intrusivos.
Además, el dispositivo está adaptado para integrar instrumentos ultrasónicos existentes.
En una forma de realización preferida, la unidad de control está adaptada para seleccionar una zona de interés adicional que está esencialmente centrada alrededor de la parte del cuerpo de la mujer, siendo el parámetro de progresión del parto, durante el alumbramiento, definido por una combinación de la zona de interés y de la zona de interés adicional. De esta forma, el parámetro queda completamente definido sin ninguna referencia a puntos de referencia exteriores al cuerpo de la mujer o del feto y el seguimiento de la zona de interés es más fiable, en particular, es independiente de los movimientos de la parturienta. Lo mismo no se aplica al caso de un punto de referencia anatómico solamente, aún cuando la posición de la sonda con respecto a un sistema de coordenadas absoluto sea conocida para la unidad de control. En este caso, un punto de la propia sonda proporciona la segunda referencia, que se necesita definir junto con el punto anatómico, un parámetro de distancia o una línea que define un parámetro angular.
En una forma de realización preferida la interfaz de usuario está adaptada para proporcionar al operador una opción de seleccionar una imagen de referencia adicional entre una de las imágenes ultrasónicas subsiguientes, de modo que un primer y un segundo seguimiento en dos pluralidades de pixels se realicen al mismo tiempo, estando los medios para el cálculo iterativo adaptados para realizar las etapas que consisten en:
comparar valores de la función de pixel local calculados en pixels de la zona de interés de la imagen ultrasónica de referencia y valores de la función de pixel local calculados en pixels de la zona de interés de una imagen ultrasónica subsiguiente, de modo que se identifique una primera posición de la zona de interés derivada;
comparación entre valores de la función de pixel local calculada en pixels... [Seguir leyendo]
Reivindicaciones:
1. Un aparato (10) para medir un parámetro de progresión del parto, durante el alumbramiento, con la ayuda de imágenes ultrasónicas obtenidas mediante impulsos ultrasónicos, comprendiendo dicho aparato (10) :
una sonda ultrasónica;
un medio de fijación para fijar dicha sonda ultrasónica (1) en el cuerpo de una parturienta (2) de modo que dicha sonda (1) tenga un campo visual (7) que comprende una parte del cuerpo de dicha parturienta (2) y de un feto (3) , en particular, el canal endocervical (8) o el pubis de la parturienta (2) ;
una unidad de control (13) para recibir y analizar señales emitidas desde dicha sonda ultrasónica (1) , cuya unidad de control (13) crea o recibe como entrada de dicha sonda una imagen ultrasónica de referencia (11) Y varias imágenes ultrasónicas subsiguientes (12) , tomadas sucesivamente después de dicha imagen ultrasónica de referencia (11) ;
una interfaz de usuario (14) para seleccionar una zona de interés (21) en dicha imagen ultrasónica de referencia (11) por un operador, estando la interfaz de usuario (14) adaptada para seleccionar dicha zona de interés (21) esencialmente centrada alrededor de dicha parte del cuerpo de la parturienta, comprendiendo dicha zona de interés (21) una pluralidad pixels (23) ;
cuya unidad de control (13) comprende:
un medio de seguimiento automático con el fin de seguir dicha zona de interés (21) , estando dicho medio de seguimiento automático diseñado para identificar zonas de interés derivadas (22) en las imágenes elegidas entre las varias imágenes ultrasónicas subsiguientes (12) , estando dichas zonas de interés derivadas (22) de dicha zona de interés (21) elegida en dicha imagen ultrasónica de referencia (11) , comprendiendo dicho medio de seguimiento:
un medio para calcular una función de pixel local predeterminada para cada pixel (23) o grupo de pixels de dicha zona de interés (21) en dicha imagen ultrasónica de referencia (11) Y en cada imagen elegida entre dichas varias imágenes ultrasónicas subsiguientes (12) ;
un medio para calcular, de forma iterativa, a partir de dicha imagen ultrasónica de referencia (11) , la posición de dicha zona de interés derivada (22) en cada imagen elegida, estando dicho medio de cálculo iterativo diseñado para efectuar comparaciones entre:
valores de dicha función de pixel local calculada para los pixels (23) de dicha zona de interés (21) de una imagen entre las imágenes elegidas;
valores de dicha función de pixel local calculados en pixels de dicha zona de interés (22) de una imagen ultrasónica subsiguiente (12) ;
un medio para comparar cada posición de dicha zona de interés derivada (22) con la posición de dicha zona de interés (21) dentro de dicha imagen ultrasónica de referencia (11) o dentro de otra imagen de entre dichas imágenes elegidas y para calcular un parámetro de progresión del parto.
2. Un aparato (10) según la reivindicación 1, en donde dicha unidad de control (13) está diseñada para elegir otra zona de interés (21) que está esencialmente centrada alrededor de dicha parte del cuerpo de la parturienta, estando dicho parámetro de progresión del parto, durante el alumbramiento, definido por una combinación de dicha zona de interés (21) Y dicha otra zona de interés (21) .
3. Un aparato (10) según la reivindicación 1, en donde dicha interfaz de usuario (13) está adaptada para proporcionar a dicho operador una opción para la elección de otra imagen de referencia entre una de dichas imágenes ultrasónicas subsiguientes, de modo que un primer y un segundo seguimiento sobre dos pluralidades de pixels (23) se realicen al mismo tiempo, estando dicho medio de cálculo iterativo diseñado para efectuar las etapas que consisten en:
comparar valores de dicha función de pixel local (f) calculados en pixels (23) de dicha zona de interés (21) de dicha imagen ultrasónica de referencia (11) Y valores de dicha función de pixel local (f) calculados en pixels (23) de dicha zona de interés (22) de una imagen ultrasónica subsiguiente (12) , de modo que se identifique una primera posición de dicha zona de interés derivada;
comparar valores de dicha función de pixel local (f) calculados en pixels de dicha otra imagen de referencia y valores de dicha función de pixel local (f) calculados en pixel (23) de dicha zona de interés (22) de una imagen ultrasónica subsiguiente (12) , de modo que se identifique una segunda posición de dicha zona de interés derivada;
identificar otra zona de interés derivada por intermedio de una comparación entre los seguimientos de las primera y segunda posiciones de dicha zona de interés derivada en función de un criterio predeterminado de modo que sea posible, con la ayuda de dicho primer seguimiento, tener en cuenta, al máximo, cualquier cambio posible de los tejidos durante el alumbramiento y cuando sea posible, con la ayuda del segundo seguimiento, eliminar perturbaciones que puedan afectar a los cálculos de dicha zona de interés derivada.
4. Un aparato (10) según la reivindicación 3, en donde dicha interfaz de usuario (14) está diseñada para proporcionar a dicho operador una opción que le permita elegir dicho criterio entre:
una posición que se identifica por el valor (34) de la función objeto (F) más baja;
la posición que es la más próxima a un conjunto predeterminado de valores;
la posición que está más alejada de un conjunto predeterminado de valores;
una posición media entre dichas primera y segunda posiciones.
5. Un aparato (10) según la reivindicación 1, en donde se utiliza un medio con el fin de medir un parámetro de posición de dicha sonda ultrasónica (1) con respecto a un sistema de coordenadas (20) exterior a la parturienta (22) y dicha unidad de control (13) comprende un medio para recibir dicho parámetro de posición y un medio para añadir dicho parámetro de posición y la posición de dicha zona de interés derivada (22) con respecto a dicha sonda, de modo que dicho medio de comparación efectúe una comparación entre la posición real de dicha zona de interés (21) teniendo en cuenta dicho sistema de coordenadas (20) exterior a la parturienta (2) .
6. Un aparato (10) según la reivindicación 1 en donde dicha interfaz de usuario (14) permite definir, como entrada, una pluralidad de zonas de interés (21) elegidas por un operador en dicha imagen de referencia (11) , en particular definiendo cada zona de interés (21) un mismo parámetro de progresión del parto.
7. Un aparato (10) según la reivindicación 1, en donde dicho parámetro de progresión del parto (25) se elige dentro del grupo que comprende:
la dilatación (26) del canal endocervical (8) de la parturienta (2) , estando dicha dilatación (26) asociada, en particular, a una distancia entre al menos dos zonas de interés (12) elegidas en el borde (9) de dicho canal endocervical (8) ;
la posición de la cabeza (4) de dicho feto (3) durante el descenso a lo largo del trayecto de salida a través de dicho canal endocervical (8) , es decir, la posición de la parte presentada de la cabeza fetal, estando dicha posición asociada, en particular, a una zona de interés (12) que se elige en una parte fija del cuerpo de la parturienta (2) y una zona de interés (12) que se elige en la cabeza (4) de dicho feto (3) ;
la rotación de la cabeza (4) de dicho feto (3) , es decir, la posición fetal de la cabeza (30) estando dicha rotación asociada a un ángulo que está formado por una línea que se define por dos zonas de interés (21) centradas en una parte fija de dicho cuerpo de dicha parturienta (2) y por una linea que se define por dos zonas de interés (21) que forman parte integrante de dicho feto (3) .
8. Un aparato (10) según la reivindicación 1, en donde dicha imagen ultrasónica de referencia (11) y/o dichas imágenes ultrasónicas subsiguientes (12) son imágenes de cualquier plano de sección transversal de dicho campo visual
(7) seleccionado por dicho operador.
9. Un aparato (10) según la reivindicación 1, en donde dicha zona de interés (21) es una zona de un espacio tridimensional, en particular, una zona tridimensional, siendo dicha zona tridimensional, en particular, obtenida como una unión de zonas de interés (21) de una pluralidad de imágenes ultrasónicas de secciones del plano de dicho campo visual (7) , obteniéndose dicha pluralidad de imágenes ultrasónicas girando dicho campo visual (7) alrededor de un eje común a dichas secciones del plano.
10. Un aparato (10) según la reivindicación 1, en donde dicha zona de interés (21) es una zona de un espacio tridimensional, obtenida, en particular, directamente a través de una adquisición matricial en tiempo real en 3D.
11. Un aparato (10) según la reivindicación 1, en donde dicho medio para calcular, de forma iterativa, las posiciones de dicha zona de interés (22) comprende:
un medio para calcular dicha función de pixel local (f) en una pluralidad de dominios (36) de dichas imágenes ultrasónicas subsiguientes (12) ,
un medio para calcular una función objeto predeterminada (F) en cada uno de dichos dominios (36) , asociando dicha función objeto a cada uno de dichos dominios (36) un valor de desviación entre dicha función de pixel local (f) tal como se calcula en dicho dominio (36) y dicha función de pixel local (f) tal como se calcula en dicha zona de interés (12) ;
un medio para determinar un dominio (22) de una imagen ultrasónica subsiguiente en la que dicha función objeto (F) tiene un valor mínimo (34) .
12. Un aparato (10) según la reivindicación 1, en donde dichas imágenes de dicha pluralidad de imágenes subsiguientes (12) en las cuales se identifica dicha zona derivada (22) se obtienen por muestreo a una frecuencia predeterminada.
13. Un aparato (10) según la reivindicación 1, en donde dicha posición de la cabeza (4) de dicho feto (3) está asociada a otra zona de interés (22) que se elige en una parte fija de dicho cuerpo de dicha parturienta (2) y/o a otra zona de 10 interés (22) que se elige al nivel de la cabeza (4) de dicho feto (3) .
14. Un aparato (10) según la reivindicación 1, en donde dicha interfaz de usuario (14) dar a conocer un medio para señalar un valor anómalo de un parámetro de progresión del parto o de un parámetro fisiológico del feto (25) con respecto a una gama predeterminada o una combinación anómala de varios parámetros de progresión del parto y/o parámetros fisiológicos del feto (25) .
15. Un aparato (10) según las reivindicaciones 1 o 14, que comprende un medio (18) para almacenar valores de dichos parámetros de progresión del parto (25) , en particular dicho valor anómalo y dicha combinación anómala de valores.
21/29 Jr.::;;§F~R~I~ 21/2 '~~m~
14y...
Fig.5
Fig.8
Fijación de una sonda ecográfica
S1~~----------------~
Visualización de una imagen ecográfica de referencia
5~~------~--------~
Definición de un conjunto de parámetros a supervisarse
5~~------~--------~
Definición de una pluralidad de puntos de referencia anatómicos en la imagen ecográfica de referencia
Fig.9
INICIO
Patentes similares o relacionadas:
SÍSTEMA Y MÉTODO PARA EL TRATAMIENTO DE ADICCIONES DE UN INDIVIDUO QUE LO NECESITE, CON BAJAS TASAS DE RELAPSO, del 2 de Julio de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: La invención corresponde a un sistema, más particularmente a un sistema NFB, y método, que permite el tratamiento de adicciones en las que está […]
Sonda de ultrasonidos con alojamiento y punta intercambiable, del 1 de Julio de 2020, de ECHOSENS: Una sonda de ultrasonidos que comprende una punta intercambiable , un alojamiento de sonda de ultrasonidos , al menos un imán (12, […]
Un dispositivo para realizar anestesia regional, del 3 de Junio de 2020, de The Queen Elizabeth Hospital King's Lynn NHS Foundation Trust: Un dispositivo de administración anestésica que comprende: a) una aguja anestésica regional; (b) un tubo de alimentación y un dispositivo de infusión en […]
DISPOSITIVO HOLOGRÁFICO PARA VISUALIZACIÓN DE IMÁGENES ECOGRÁFICAS EN TRES DIMENSIONES, del 2 de Junio de 2020, de CORTES MESA, Daniel: 1. Dispositivo holográfico para visualización de imágenes ecográficas en tres dimensiones, que comprende: -un soporte , - una pirámide de […]
Aparato de monitorización para monitorizar un procedimiento de ablación, del 6 de Mayo de 2020, de KONINKLIJKE PHILIPS N.V: Un aparato de monitorización para monitorizar un procedimiento de ablación aplicado a un objeto que es tejido, el aparato de monitorización comprende: […]
Método para análisis y procesamiento de datos de dispositivo de detección de elasticidad, y dispositivo de detección de elasticidad, del 15 de Abril de 2020, de Wuxi Hisky Medical Technologies Co., Ltd: Método para análisis y procesamiento de datos de un dispositivo de detección de elasticidad, comprendiendo el dispositivo de detección de elasticidad […]
Sistema de tratamiento de tejidos por ultrasonido, del 25 de Marzo de 2020, de Guided Therapy Systems, L.L.C: Un sistema de tratamiento por ultrasonido que se configura para estiramientos faciales no invasivos y estiramiento de tejido profundo, dicho sistema de tratamiento […]
Método de procesamiento de información de elasticidad y morfología tisular y dispositivo de detección de elasticidad, del 18 de Marzo de 2020, de Wuxi Hisky Medical Technologies Co., Ltd: Método para procesar información de morfología e información de elasticidad de un tejido, que comprende: obtener una imagen de morfología en escala […]