Algoritmo para determinar parámetros de la pupila.
Un algoritmo para determinar parámetros de la pupila, que comprende las etapas de:
a) obtener una imagen de la pupila;
b) comprimir la imagen de la pupila una cantidad seleccionada, n, y comprimir la imagen de la pupila una cantidad seleccionada diferente, n1< n, donde n1< 10;
c) calcular un valor umbral para la imagen de la pupila comprimida; en el que la etapa (c) comprende crear una imagen binaria ajustando todos los valores de píxel por debajo del umbral a un valor de cero y todos los valores de píxel por encima del umbral a un valor alto.
d) determinar un valor de parámetro del centro de la pupila;
e) determinar un parámetro de diámetro de al menos dos ejes de coordenadas de la pupila;
f) determinar una forma del perímetro de la pupila en base al centro y al parámetro del diámetro de al menos dos ejes de coordenadas;
g) aplicar la representación gráfica de la forma en la imagen comprimida y determinar un promedio de los valores de señal de píxel dentro del perímetro y ajustar todos los valores de píxel dentro del perímetro que son mayores que el valor promedio al valor promedio;
h) ampliar el perímetro una cantidad seleccionada, Δ, y ajustar todos los valores de píxel fuera del perímetro ampliado a un blanco binario; y repetir las etapas (d, e) en la imagen obtenida de este modo con el perímetro ampliado;
i) determinar la posición de un punto del borde en cada extremo de cada uno del diámetro a lo largo de los dos ejes de coordenadas en la imagen comprimida a n, y ajustar una forma del perímetro a las posiciones de los puntos del borde;
j) repetir las etapas (d, e) en una imagen obtenida de la etapa (i);
k) repetir la etapa (g) en la imagen de la pupila comprimida a n1;
l) repetir la etapa (h) en la imagen obtenida mediante la etapa (k), en la que el perímetro se amplia en una cantidad seleccionada diferente &Delta,1, donde Δ1< Δ;
m) repetir las etapas (d, e) en la imagen obtenida mediante la etapa (1);
n) realizar una corrección del párpado en la imagen obtenida mediante la etapa (m); y
o) repetir las etapas (d, e) en la imagen obtenida mediante la etapa (n).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2004/008201.
Solicitante: BAUSCH & LOMB INCORPORATED.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: ONE BAUSCH & LOMB PLACE ROCHESTER, NEW YORK 14604 ESTADOS UNIDOS DE AMERICA.
Inventor/es: HOHLA, KRISTIAN, YOUSSEFI, GERHARD, SAPPEL, CHRISTOPH, HEGELS,ERNST, POLLAND,Hans-Joachim, FRANZKE,STEFAN, JANSEN,BIRTE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B3/103 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 3/00 Aparatos para el examen óptico o clínico de los ojos; Instrumentos para examinar los ojos (examen ocular utilizando ondas ultrasónicas, sónicas o infrasónicas A61B 8/10). › para la determinación de la refracción, p. ej. refractómetros, esquiascopios.
- A61B3/11 A61B 3/00 […] › para la medida de la distancia interpupilar o del diámetro de la pupila.
- G02C7/02 FISICA. › G02 OPTICA. › G02C GAFAS; GAFAS DE SOL O GAFAS PROTECTORAS EN LA MEDIDA EN QUE SUS CARACTERISTICAS SON LAS MISMAS QUE LAS DE LAS GAFAS; LENTES DE CONTACTO. › G02C 7/00 Piezas ópticas (caracterizadas por el material de que están hechas G02B 1/00). › Cristales; Sistemas de cristales.
- G02C7/04 G02C 7/00 […] › Lentes de contacto para los ojos.
PDF original: ES-2397518_T3.pdf
Fragmento de la descripción:
Algoritmo para determinar parámetros de la pupila.
La invención se refiere al campo de la oftalmología, en particular a un algoritmo para determinar parámetros de la pupila.
Realizaciones ejemplares de la invención se refieren, en general, a las aplicaciones de detección de frente de onda oftálmico, y más particularmente a medir y evaluar la posición y los efectos de una lente de contacto in vivo.
La medición de la visión de una persona puede conseguirse de muchas maneras. El método más tradicional implica una medición de la agudeza visual en la que al paciente se le pide que lea letras de diversos tamaños en una gráfica alejada mientras mira a través de diferentes prescripciones de lente proporcionadas por el facultativo. La refracción manifiesta del paciente (es decir, potencia esférica, potencia cilíndrica y eje) se determina mediante la elección del paciente de las lentes de prueba, que proporcionan la visión más clara de la gráfica optométrica alejada. Los defectos de esta técnica están ampliamente reconocidos. Por ejemplo, las lentes de prueba están limitadas a valores de prescripción discretos en lugar de continuos; la agudeza visual es sustancialmente la única medición de la visión que es evaluada; y la evaluación es subjetiva en lugar de objetiva.
Existen complicaciones añadidas cuando el paciente lleva lentes de contacto para mejorar la visión. Se sabe bien que la posición de una lente de contacto in vivo no es estable. La película lacrimal sobre la que está montada la lente proporciona un medio que permite que la lente se deslice en cualquier dirección y gire en función de la dirección de la mirada, el parpadeo y por otras razones. Si el defecto de visión del ojo de la persona no es simétrico en el diámetro de la pupila (por ejemplo, astigmatismo) , entonces el rendimiento óptimo de la lente de contacto se obtendrá solamente cuando la lente tenga una orientación particular, estabilizada en el ojo.
En los últimos años, se han desarrollado aparatos y técnicas tecnológicamente avanzadas para medir la agudeza visual y otras mediciones de la visión que proporcionan resultados más precisos e informativos que los obtenidos en el pasado. Por ejemplo, dispositivos conocidos como aberrómetros incorporan sensores de frente de onda que miden objetivamente aberraciones en el ojo del paciente. Estas aberraciones no solamente incluyen los valores de refracción manifiesta de la esfera y el cilindro/eje, sino que también incluyen aberraciones tales como aberración esférica, coma y astigmatismo irregular, por ejemplo, que pueden alterar significativamente la calidad visual en muchos casos. La medición precisa de este cuerpo más complejo de defectos visuales es importante para intentar corregirlos. El conocimiento de la posición y la estabilidad de una lente de contacto es especialmente significativo debido a la compleja asociación entre la posición de la lente y el control de la aberración. Existe un valor adicional en ser capaz de determinar la interacción entre la posición de la lente de contacto y el control de la aberración en un estado en línea; es decir, medición de información de frente de onda y lentes de contacto in vivo, evaluación, y (opcionalmente) mostrar todo en cuestión de milisegundos. No es evidente que hasta ahora, fuera posible una evaluación objetiva en línea de la posición y estabilidad de la lente de contacto, junto con mediciones correspondientes del parámetro de la pupila y el frente de onda.
El documento US-B-6 260 968 se refiere a un pupilómetro que tiene una capacidad de detección de irregularidad o no uniformidad de la pupila. El pupilómetro puede comprender un sensor de formación de imágenes para generar señales representativas de una pupila de un ojo, un procesador de datos y un programa ejecutable por el procesador de datos para permitir que el procesador de datos procese las señales recibidas desde el sensor de formación de imágenes y de este modo identificar una o más regiones de no uniformidad en una imagen de un perímetro de la pupila.
La invención se define mediante las características de las reivindicaciones adjuntas. Una realización ejemplar se refiere a una lente de contacto comercializada, especialmente adecuada para la medición en línea, in vivo de la posición y la orientación. De acuerdo con un aspecto de esta realización ejemplar, La superficie posterior o anterior de la lente, o el cuerpo de la lente, tiene un patrón de absorción o dispersión de la luz de marcas en una región de zona óptica de la lente. Se pretende que las marcas sean iluminadas por la luz que se propaga desde la retina hacia fuera y que, a continuación, se formen imágenes de ellas por un detector CCD/cámara. Esta técnica de iluminación proporciona una imagen de la pupila brillante de contraste con marcas de aspecto oscuro. Las marcas no afectan a la visión de una persona que lleva las lentes de contacto. En diversos aspectos de la realización ejemplar, las marcas pueden ser marcas moldeadas, marcas cortadas con láser, marcas aplicadas litográficamente, y otras formas, tal como apreciará un especialista en la técnica. En otros diversos aspectos, las marcas pueden estar en un patrón que tiene cualquiera, o ninguna de, simetría rotacional o traslacional. Como alternativa, las marcas pueden estar alineadas a lo largo de una curva predefinida, a lo largo de una pluralidad de líneas rectas que pueden o no intersecarse, o a lo largo de líneas que se intersecan en un patrón predeterminado. En un aspecto de esta realización ejemplar, las marcas tienen, cada una, un tamaño para tener un diámetro de menos de aproximadamente 200 micrómetros; y en otro aspecto, las marcas tienen un diámetro en un intervalo entre aproximadamente 50 micrómetros y 200 micrómetros. En un aspecto ejemplar, las marcas tienen una distancia de separación mutua de aproximadamente 600 micrómetros.
En un aspecto alternativo de esta realización ejemplar, se proporciona una lente de contacto que tiene un patrón de marcas coloreadas fuera del área de la pupila del ojo del paciente cuando la lente está in vivo. Estas marcas no están iluminadas desde atrás, sino desde el lado frontal si cualquier iluminación adicional fuera necesaria. En una variación, el patrón comprende al menos tres marcas coloreadas dispuestas en un patrón no simétrico rotacionalmente.
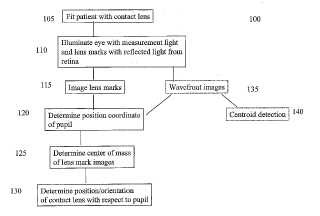
Otra realización ejemplar se refiere a un método para evaluar objetivamente una lente de contacto in vivo, en línea. La posición y orientación in vivo de una lente de contacto marcada especialmente puede determinarse objetivamente con respecto a una coordenada de la pupila medida en un marco temporal de milisegundos (“en línea”) en un intervalo de tiempo predeterminado. Esto proporciona, entre otras cosas, evaluación de la lente de contacto de forma sustancialmente instantánea mientras ésta se lleva. La evaluación se realiza con un dispositivo aberrómetro e incluye las etapas de equipar al paciente con una lente de contacto marcada de forma selectiva (descrita con más detalle a continuación) , iluminar el ojo del paciente de modo que la luz dispersada desde la retina llene la pupila y esta luz saliente ilumine las marcas de la lente, formar imágenes de la luz que sale de modo que las marcas en la lente se resuelvan, determinar una coordenada de posición de la pupila (por ejemplo, centro de la pupila, orientación de la pupila) , y determinar la posición de las marcas (u otras coordenadas de referencia de la lente) con respecto a las coordenadas de la pupila. En un aspecto de esta realización ejemplar, se usa una transformada de Hough para identificar y ubicar las marcas de la lente y la posición/orientación de la lente.
En un aspecto alternativo de esta realización ejemplar asociado con una lente de contacto que tiene un patrón de marcas coloreadas mencionado anteriormente, las marcas coloreadas fuera del área de la pupila en la lente in vivo pueden detectarse con un filtro apropiado. Esto puede preferirse si el color de las marcas es similar al color del iris del sujeto. Una vez que se detectan las marcas, puede utilizarse una rutina informática para comparar el patrón de marcas descubierto con la estructura de la marca en la lente para evaluar la posición y orientación de la lente.
La medición y evaluación en línea de la posición de la lente de contacto in vivo puede producirse a velocidades de 10 Hz o más. Por ejemplo, el uso de un procesador de 800 MHz permite el procesamiento en línea a una velocidad de aproximadamente 25 Hz. Un procesador de 1, 6 GHz doblaría sustancialmente esta velocidad, que está limitada por la velocidad del procesador, en lugar de por la capacidad del algoritmo. En un aspecto relacionado, las mediciones de frente... [Seguir leyendo]
Reivindicaciones:
1. Un algoritmo para determinar parámetros de la pupila, que comprende las etapas de: a) obtener una imagen de la pupila; b) comprimir la imagen de la pupila una cantidad seleccionada, n, y comprimir la imagen de la pupila una cantidad seleccionada diferente, n1 < n, donde n1 < 10; c) calcular un valor umbral para la imagen de la pupila comprimida; en el que la etapa (c) comprende crear una
imagen binaria ajustando todos los valores de píxel por debajo del umbral a un valor de cero y todos los valores de píxel por encima del umbral a un valor alto. d) determinar un valor de parámetro del centro de la pupila; e) determinar un parámetro de diámetro de al menos dos ejes de coordenadas de la pupila; f) determinar una forma del perímetro de la pupila en base al centro y al parámetro del diámetro de al menos
dos ejes de coordenadas; g) aplicar la representación gráfica de la forma en la imagen comprimida y determinar un promedio de los
valores de señal de píxel dentro del perímetro y ajustar todos los valores de píxel dentro del perímetro que son mayores que el valor promedio al valor promedio; h) ampliar el perímetro una cantidad seleccionada, ∆, y ajustar todos los valores de píxel fuera del perímetro
ampliado a un blanco binario; y repetir las etapas (d, e) en la imagen obtenida de este modo con el perímetro
ampliado; i) determinar la posición de un punto del borde en cada extremo de cada uno del diámetro a lo largo de los dos ejes de coordenadas en la imagen comprimida a n, y ajustar una forma del perímetro a las posiciones de los puntos del borde;
j) repetir las etapas (d, e) en una imagen obtenida de la etapa (i) ; k) repetir la etapa (g) en la imagen de la pupila comprimida a n1; l) repetir la etapa (h) en la imagen obtenida mediante la etapa (k) , en la que el perímetro se amplia en una
cantidad seleccionada diferente ∆1, donde ∆1 < ∆; m) repetir las etapas (d, e) en la imagen obtenida mediante la etapa (1) ; n) realizar una corrección del párpado en la imagen obtenida mediante la etapa (m) ; y o) repetir las etapas (d, e) en la imagen obtenida mediante la etapa (n) .
3. El algoritmo de la reivindicación 1 ó 2, en el que se determina un centro de masa para los píxeles de valor cero, así como una desviación estándar, que se usa para determinar valores de diámetro a lo largo de un eje de la coordenada x y un eje de la coordenada y.
4. El algoritmo de la reivindicación 3, en el que la forma del perímetro es una elipse.
5. El algoritmo de la reivindicación 4, en el que ∆ está en un intervalo entre aproximadamente el 5% y el 25%, y ∆1 está en un intervalo entre aproximadamente el 5% y el 25%.
6. El algoritmo de la reivindicación 5, en el que la etapa (i) comprende ajustar una elipse a los puntos del borde en cada extremo del eje de la coordenada x y el eje la coordenada y.
7. El algoritmo de la reivindicación 6, en el que la etapa (n) comprende realizar un barrido de cada columna de píxeles de la imagen comprimida a n que está contenida dentro del perímetro de una elipse descubierta, y calcular una función de diferencia entre el perímetro de la elipse descubierta y el borde de la pupila en la imagen comprimida a n, en función de la posición X.
8. El algoritmo de la reivindicación 7, que comprende determinar al menos dos máximos y un mínimo entre dichos máximos de la función de diferencia y, en base al cumplimiento de criterios de error seleccionados, ubicar un arco de la elipse descubierta entre las posiciones X de los dos máximos.
9. El algoritmo de la reivindicación 8, que comprende determinar el parámetro del centro de la pupila y el parámetro del tamaño de la pupila.
Patentes similares o relacionadas:
Ajuste de una lente de gafas dependiente de la luminosidad, del 22 de Julio de 2020, de RODENSTOCK GMBH: Procedimiento para ajustar una lente individual para como mínimo un ojo de un usuario de gafas, que comprende: - Establecimiento de una situación […]
Un método para optimizar la geometría de una lente oftálmica semi-acabada en un conjunto de lentes oftálmicas semi-acabadas, del 15 de Julio de 2020, de Carl Zeiss Vision, Inc: Un método para optimizar la geometría de al menos una lente oftálmica semi-acabada en un conjunto de lentes oftálmicas semi-acabadas que […]
Lente polarizante de policarbonato aromático, del 15 de Julio de 2020, de MITSUBISHI GAS CHEMICAL COMPANY, INC.: Lente polarizante, que se forma estirando una película de poli(alcohol vinílico) y tiñendo la película con un tinte dicroico, uniendo una lámina de policarbonato […]
Lente de gafas y procedimiento para su fabricación, del 8 de Julio de 2020, de Carl Zeiss Vision International GmbH: Lente de gafas (60, 70, 80, 90, 102, 110a, 110b) que comprende - un primer grupo de elementos de volumen, comprendiendo el primer grupo de elementos […]
Lente de gafas y procedimiento para su fabricación, del 1 de Julio de 2020, de Carl Zeiss Vision International GmbH: Lente de gafas (60, 70, 80, 90, 102, 110a, 110b) que comprende - un primer grupo de elementos de volumen, comprendiendo el primer grupo de elementos de volumen una pluralidad […]
Lente difractiva multifocal oftálmica, del 1 de Abril de 2020, de VSY Biyoteknoloji Ve Ilac Sanayi Anonim Sirketi: Lente multifocal oftálmica , que comprende, como mínimo, puntos focales para la visión de cerca, intermedia y de lejos, que tiene un cuerpo de lente […]
LENTE OFTÁLMICA PARA CONVERSIÓN ESPECTRAL DE LA LUZ Y MÉTODO PARA FABRICARLA, del 26 de Marzo de 2020, de FUNDACIÓN IDONIAL: Lente oftálmica para conversión espectral de la luz y método para fabricarla. La lente para conversión espectral de la luz que incluye una lámina de vidrio […]
Producto óptico, lente para gafas y gafas, del 11 de Marzo de 2020, de TOKAI OPTICAL CO., LTD: Un producto óptico que consiste en una base y una película óptica multicapa en una o ambas superficies de la base, satisfaciendo la película de multicapa […]