DISPOSITIVO DE TRANSFERENCIA PARA TRANSFERIR ENVASES FLEXIBLES VACIOS DESDE UNA HILERA DE ENVASES A DOS O MÁS HILERAS DE ENVASES EN UNA MÁQUINA ENVASADORA AUTOMÁTICA.
Dispositivo de transferencia para transferir envases flexibles vacíos desde una hilera de envases a dos o más hileras de envases en una máquina envasadora automática.
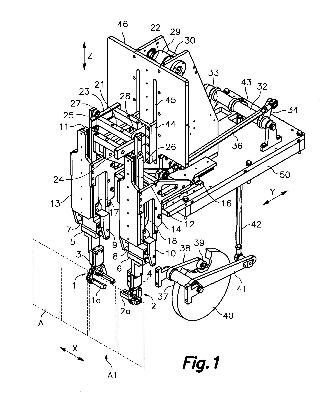
El dispositivo de transferencia comprende dos pinzas (1, 2) soportadas en unos respectivos soportes de pinza (5, 6) y accionadas por unos actuadores (3, 4). Los soportes de pinza (5, 6) están montados de manera móvil en una dirección X paralela a una hilera de envases de suministro (A1) en unos soportes de guía (9, 10), que a su vez están montados de manera movible en una dirección Z en unos carros portapinzas (13, 14), que a su vez están montados de manera movible en una dirección y en un soporte base (50). En los soportes de pinza (5, 6) están montados unos seguidores de leva (19, 20) acoplados a unas levas de guía (17, 18) dispuestas en los correspondientes carros portapinzas (13, 14). Unos medios de accionamiento mueven los soportes de pinza (5, 6) y las pinzas (1, 2) en unas trayectorias combinadas en las direcciones X, Y, Z.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201100518.
Solicitante: MESPACK, S.L.
Nacionalidad solicitante: España.
Inventor/es: MARTI ROCHE,ENRIC, FITE SALA, MENNA, MORA FLORES,FRANCISCO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B43/46 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 43/00 Formación, alimentación, abertura o montaje de receptáculos o recipientes, en unión con el embalaje (formación de bolsas en las hojas, los elementos de envoltura o en las bandas, presionando el material en las matrices o desplazándolo sobre matrices de plegado B65B 47/00). › sirviéndose de zarpas.
Fragmento de la descripción:
DISPOSITIVO DE TRANSFERENCIA PARA TRANSFERIR ENVASES FLEXIBLES VAcíos DESDE UNA HILERA DE ENVASES A DOS O MÁS HILERAS DE ENVASES EN UNA MÁQUINA ENVASADORA AUTOMÁTICA
Campo de la técnica
La presente invención concierne en general a un dispositivo de transferencia para transferir envases flexibles vacíos desde una hilera de envases a dos o más hileras de envases en una máquina envasadora automática, y más en particular a un dispositivo de transferencia para transferir envases flexibles vacíos, los cuales son suministrados por una unidad de formación de envases o una unidad de suministro de envases preformados dispuestos en una hilera en la que los envases flexibles están alineados en una dirección longitudinal horizontal y orientados en un mismo plano vertical, a una unidad de llenado en la que los envases flexibles están dispuestos en dos o más hileras con los envases flexibles alineados en unas respectivas direcciones longitudinales horizontales y orientados en respectivos planos verticales simétricos respecto al plano de la hilera de envases de suministro.
Antecedentes de la invención
El documento ES 2117929 A1 describe un dispositivo de transferencia para transferir envases flexibles vacíos desde una hilera de envases suministrada por una unidad de formación de envases a unas pinzas que se mueven en un carrusel de una unidad de llenado y cierre de los envases en una máquina envasadora automática de tipo horizontal. La unidad de formación de envases está configurada para formar los envases a partir de un material en lámina desdevanado de una bobina y suministrar los envases dispuestos en una hilera en la que los envases flexibles están alineados en una dirección longitudinal horizontal y orientados en un mismo plano vertical, y las pinzas del carrusel de la unidad de llenado soportan los envases dispuestos en una única hilera situada en el mismo plano que la hilera de envases de suministro aunque a un nivel superior. Por consiguiente, el dispositivo de transferencia se limita a desplazar verticalmente los envases uno a uno desde el nivel de la hilera de envases de suministro hasta el nivel de la hilera de envases de llenado.
El documento ES 2229836 A 1 describe un dispositivo de pinza para un carrusel de una unidad de llenado y cierre de envases flexibles de una máquina envasadora automática de tipo horizontal que está preparada para soportar dos envases flexibles dispuestos paralelos entre sí. Mediante pinzas dobles de este tipo, en el carrusel de la unidad de llenado los envases flexibles están dispuestos en dos hileras en las que los envases flexibles están alineados en unas respectivas direcciones longitudinales horizontales y orientados en respectivos planos verticales paralelos.
El documento ES 2226517 A 1 da a conocer un dispositivo de transferencia para transferir envases flexibles vacíos dispuestos en una hilera en la que los envases flexibles están alineados en una dirección longitudinal horizontal y orientados en un mismo plano vertical, a una unidad de llenado provista de pinzas dobles como la descrita en el citado documento ES 2229836 A 1, en la que los envases flexibles están dispuestos en dos hileras con los envases flexibles alineados en unas respectivas direcciones longitudinales horizontales y orientados en respectivos planos verticales mutuamente paralelos pero perpendiculares al plano de la hilera de envases de suministro. Por consiguiente, el dispositivo de transferencia necesita girar los envases noventa grados para transferirlos desde la hilera de envases de suministro hasta las dos hileras de envases de llenado.
Exposición de la invención
La presente invención aporta un dispositivo de transferencia para transferir envases flexibles vacíos desde una hilera de envases a dos o más hileras de envases en una máquina envasadora automática, donde dicha máquina envasadora automática comprende una unidad de formación de envases o una unidad de suministro de envases preformados provista de medios para suministrar una hilera de envases de suministro, en la que unos envases flexibles están alineados en una dirección longitudinal X horizontal y orientados en un mismo plano vertical, y una unidad de llenado provista de medios para llenar envases flexibles dispuestos en al menos dos hileras de envases de llenado paralelas y cerrarlos, y donde dicho dispositivo de transferencia comprende medios para transferir los envases flexibles desde dicha hilera de envases de suministro a dichas hileras de envases de llenado.
El dispositivo de transferencia de la presente invención comprende al menos dos elementos de guía transversal fijados a un soporte base en posiciones paralelas a una dirección transversal Y horizontal perpendicular a dicha hilera de envases de suministro, al menos dos carros portapinzas acoplados a dichos elementos de guía transversal de manera que pueden ser movidos a lo largo de los mismos por unos medios de accionamiento transversal, al menos dos elementos de guía vertical fijados respectivamente a dichos carros porta pinzas en posiciones paralelas a una dirección vertical Z, al menos dos soportes de guía acoplados respectivamente a dichos elementos de guía vertical de manera que pueden ser movidos a lo largo de los mismos por unos medios de accionamiento vertical, al menos dos elementos de guía longitudinal fijados respectivamente a dichos soportes de guía en posiciones paralelas a dicha dirección longitudinal X; al menos dos respectivos soportes de pinza acoplados a dichos elementos de guía longitudinal de manera que pueden ser movidos a lo largo de los mismos, al menos dos seguidores de leva montados respectivamente en dichos soportes de pinza y acoplados a unas levas de guía dispuestas en los correspondientes carros portapinzas para mover los soportes de pinza a lo largo de los elementos de guía longitudinal cuando los soportes de guía son movidos a lo largo de los elementos de guía vertical, y al menos dos pinzas soportadas respectivamente en los soportes de pinza y accionadas por unos respectivos actuadores de pinza para moverse entre unas posiciones abierta y cerrada.
Los mencionados medios de accionamiento vertical comprenden un actuador de movimiento vertical controlado para mover simultáneamente los soportes de guía en dicha dirección vertical Z entre una posición inferior, en la que las pinzas están en una posición adecuada para agarrar unos correspondientes envases flexibles contiguos de la hilera de envases de suministro, y una posición superior, en la que las pinzas están en una posición adecuada para liberar los envases flexibles al nivel de las hileras de envases de llenado, las cuales están por encima de la hilera de envases de suministro.
Las mencionadas levas de guía definen una trayectoria combinada en la dirección vertical Z y en la dirección longitudinal X, de manera que, a consecuencia de los movimientos de los soportes de guía en la dirección vertical Z, los soportes de pinza son movidos entre una posición de agarre, que se alcanza cuando los soportes de guía están en dicha posición inferior y en la que las pinzas están separadas en dicha dirección longitudinal X una distancia equivalente a la distancia entre dos envases flexibles contiguos en la hilera de envases de suministro, y una posición de entrega, que se alcanza cuando los soportes de guía están en dicha posición superior y en la que las pinzas están separadas en la dirección longitudinal X una distancia equivalente a la distancia entre dos envases flexibles contiguos en las hileras de envases de llenado.
Los mencionados medios de accionamiento transversal comprenden un actuador de movimiento transversal controlado para mover simultáneamente los carros portapinzas en dicha dirección transversal Y entre una posición alineada, que es simultánea a la posición inferior de los soportes de guía y en la que las pinzas están alineadas con la hilera de envases de suministro, y una posición desalineada que es simultánea a la posición superior de los soportes de guía y en la que las pinzas están mutuamente desalineadas y respectivamente alineadas con las hileras de envases de llenado. En una realización, los planos verticales correspondientes a las hileras de envases de llenado están en una disposición simétrica respecto al plano vertical en el que encuentra la hilera de envases de suministro.
Con esta disposición, el dispositivo de transferencia de la presente invención mueve los envases flexibles en unas trayectorias diagonales combinadas en las direcciones longitudinal, transversal y vertical X, Y, Z...
Reivindicaciones:
1. Dispositivo de transferencia para transferir envases flexibles vacíos desde una hilera de envases a dos o más hileras de envases en una máquina envasadora automática, donde dicha máquina envasadora automática comprende una unidad de formación de envases o una unidad de suministro de envases preformados provista de medios para suministrar una hilera de envases de suministro (A 1) , en la que unos envases flexibles (A) están alineados en una dirección longitudinal X horizontal y orientados en un mismo plano vertical, y una unidad de llenado provista de medios para llenar envases flexibles (A) dispuestos en al menos dos hileras de envases de llenado (A2, A3) paralelas y cerrarlos, y donde dicho dispositivo de transferencia comprende medios para transferir los envases flexibles (A) desde dicha hilera de envases de suministro (A1) a dichas hileras de envases de llenado (A2, A3) , caracterizado por que el dispositivo de transferencia comprende:
al menos dos elementos de guía transversal (15, 16) fijados a un soporte base
(50) en posiciones paralelas a una dirección transversal Y horizontal perpendicular a dicha hilera de envases de suministro (A 1) ;
al menos dos carros porta pinzas (13, 14) montados respectivamente para moverse a lo largo de dichos elementos de guía transversal (15, 16) bajo el impulso de unos medios de accionamiento transversal,
al menos dos elementos de guía vertical (11, 12) fijados respectivamente a dichos carros porta pinzas (13, 14) en posiciones paralelas a una dirección vertical Z;
al menos dos soportes de guía (9, 10) montados respectivamente para moverse a lo largo de dichos elementos de guía vertical (11, 12) bajo el impulso de unos medios de accionamiento vertical;
al menos dos elementos de guía longitudinal (7, 8) fijados respectivamente a dichos soportes de guía (9, 10) en posiciones paralelas a dicha dirección longitudinal X;
al menos dos respectivos soportes de pinza (5, 6) montados para moverse a lo largo de dichos elementos de guía longitudinal (7, 8) ;
al menos dos seguidores de leva (19, 20) montados respectivamente en dichos soportes de pinza (5, 6) Yacoplados a unas levas de guía (17, 18) dispuestas en los correspondientes carros portapinzas (13, 14) para mover los soportes de pinza (5, 6) a lo largo de los elementos de guía longitudinal (7, 8) cuando los soportes de guía (9, 10) son movidos a lo largo de los elementos de guía vertical (11, 12) ; Y
al menos dos pinzas (1, 2) soportadas respectivamente en los soportes de pinza (5, 6) Y accionadas por unos respectivos actuadores de pinza (3, 4) para moverse entre unas posiciones abierta y cerrada.
2. Dispositivo de transferencia según la reivindicación 1, caracterizado por que dichos medios de accionamiento vertical comprenden un actuador de movimiento vertical controlado para mover simultáneamente los soportes de guía (9, 10) en dicha dirección vertical Z entre una posición inferior, en la que las pinzas (1, 2) están en una posición adecuada para agarrar unos correspondientes envases flexibles (A) contiguos de la hilera de envases de suministro (A 1) , y una posición superior, en la que las pinzas (1, 2) están en una posición adecuada para liberar los envases flexibles (A) al nivel de las hileras de envases de llenado (A2, A3) , las cuales están por encima de la hilera de envases de suministro (A 1 ) .
3. Dispositivo de transferencia según la reivindicación 2, caracterizado por que dichas levas de guía (17, 18) definen un trayectoria combinada en las direcciones longitudinal y vertical (X, Z) que mueve los soportes de pinza (5, 6) entre una posición de agarre, que se alcanza cuando los soportes de guía (9, 10) están en dicha posición inferior y en la que las pinzas (1, 2) están separadas en dicha dirección longitudinal X una distancia equivalente a la distancia entre dos envases flexibles (A) contiguos en la hilera de envases de suministro (A 1) , y una posición de entrega, que se alcanza cuando los soportes de guía (9, 10) están en dicha posición superior y en la que las pinzas (1, 2) están separadas en la dirección longitudinal X una distancia equivalente a la distancia entre dos envases flexibles (A) contiguos en las hileras de envases de llenado (A2, A3) .
4. Dispositivo de transferencia según la reivindicación 3, caracterizado por que dichos medios de accionamiento transversal comprenden un actuador de movimiento transversal controlado para mover simultáneamente los carros portapinzas (13, 14) en dicha dirección transversal Y entre una posición alineada, que es simultánea a la posición inferior de los soportes de guía (9, 10) Y en la que las pinzas (1, 2) están alineadas con la hilera de envases de suministro (A 1) , y una posición desalineada que es simultánea a la posición superior de los soportes de guía (9, 10) Y en la que las pinzas (1, 2) están mutuamente desalineadas y respectivamente alineadas con las hileras de envases de llenado (A2, A3) .
5. Dispositivo de transferencia según la reivindicación 4, caracterizado por que en dicha posición desalineada, las pinzas (1, 2) están alineadas con unos planos verticales simétricos respecto al plano vertical en el que está orientada la hilera de envases de suministro (A 1) .
6. Dispositivo de transferencia según la reivindicación 2, caracterizado por que los medios de accionamiento vertical comprenden un carro elevador (21) accionado por dicho actuador de movimiento vertical para moverse a lo largo de un elemento de guía vertical de elevador (22) fijado al soporte base (50) en una posición paralela a la dirección vertical Z, al menos dos elementos de guía transversal de elevador (23, 24) fijados a dicho carro elevador (21) en posiciones paralelas a la dirección transversal Y, y al menos dos miembros de conexión (25, 26) que tienen unos extremos inferiores fijados respectivamente a los soportes de guía (9, 10) Y unos extremos superiores provistos de unos medios de rodadura o deslizamiento (27, 28) acoplados respectivamente a dichos elementos de guía transversal de elevador (23, 24) de manera que pueden moverse a lo largo de los mismos.
7. Dispositivo de transferencia según la reivindicación 6, caracterizado por que los medios de accionamiento vertical comprenden además una correa o cadena sinfín
(29) montada sobre unas poleas (30, 31) dispuestas de manera que dicha correa o cadena sinfín (29) presenta un tramo vertical al que está fijado el carro elevador (21) , donde el actuador de movimiento vertical está conectado operativamente para hacer girar una de dichas poleas (30, 31) Y mover la correa o cadena sinfín (29) alternadamente en direcciones opuestas.
8. Dispositivo de transferencia según la reivindicación 4, caracterizado por que los medios de accionamiento transversal comprenden un árbol oscilante (32) montado sobre el soporte base (50) en una posición paralela a la dirección longitudinal X y accionado por dicho actuador de movimiento transversal para girar alternadamente un ángulo predeterminado en direcciones opuestas, al menos dos brazos de balancín (33, 34) conectados a dicho árbol oscilante (32) y al menos dos bielas (35, 36) que tienen unos primeros extremos conectados articuladamente y respectivamente a dichos brazos de balancín (33, 34) Y unos segundos extremos conectados articuladamente y respectivamente a los carros portapinzas (13, 14) .
9. Dispositivo de transferencia según la reivindicación 8, caracterizado por que los medios de accionamiento transversal comprenden además un árbol de seguidor (37) , un brazo de seguidor (38) fijado a dicho árbol de seguidor (37) , un seguidor de leva (39) montado en dicho árbol de seguidor (37) y dispuesto para seguir el perfil de una leva giratoria (40) , un brazo de transmisión (41) fijado al árbol de seguidor (37) , y un elemento de transmisión de oscilación (42) que tiene un primer extremo conectado articuladamente a dicho brazo de transmisión (41) Y un segundo extremo conectado articuladamente a un brazo de palanca (43) fijado al árbol oscilante (32) , donde el actuador de movimiento transversal está conectado operativamente para hacer girar
dicha leva giratoria (40) .
10. Dispositivo de transferencia según la reivindicación 6 o 7, caracterizado por
que dicho actuador de movimiento vertical es un motor eléctrico.
11. -Dispositivo de transferencia según la reivindicación 10, caracterizado por que dicho actuador de movimiento vertical es un servomotor controlado electrónicamente.
12. Dispositivo de transferencia según la reivindicación 8 o 9, caracterizado por que dicho actuador de movimiento transversal es un motor eléctrico.
13. Dispositivo de transferencia según la reivindicación 12, caracterizado por que dicho actuador de movimiento transversal es un servomotor controlado electrónicamente.
Patentes similares o relacionadas:
Envasado de chips comestibles de aperitivo, del 15 de Julio de 2020, de Frito-Lay Trading Company GmbH (100.0%): Un procedimiento para envasar chips comestibles de aperitivo , comprendiendo dicho procedimiento las siguientes etapas: a) proporcionar […]
Procedimiento para el llenado de gas de un compartimento de un recipiente flexible, del 22 de Abril de 2020, de ECOLEAN AB: Procedimiento de manipulación de recipientes de tipo plegable en una máquina de llenado que comprende estaciones dispuestas consecutivamente (S1, S2, […]
Máquina de llenado para bolsas con aberturas, del 19 de Febrero de 2020, de Ing. A. Rossi Impianti Industriali - Societa' a Responsabilita' Limitata: Una máquina de llenado para bolsas (S) con una abertura (B), que comprende: - un cabezal dispensador con un producto que ha […]
Planta y procedimiento de preparación de medicamentos, del 9 de Octubre de 2019, de AEA S.R.L: Planta para preparar medicamentos, que comprende: una carcasa que define al menos una cámara de almacenamiento y al menos una […]
Máquina de llenado para el llenado de un paquete de tipo bolsa flexible, del 18 de Septiembre de 2019, de ECOLEAN AB: Una máquina de llenado para llenar paquetes de tipo bolsa flexible, teniendo cada uno un canal de llenado y siendo esencialmente plano en un estado no llenado […]
 Aparato y procedimiento para transportar y llenar sacos, del 31 de Julio de 2019, de Statec Binder GmbH: Dispositivo para transportar y llenar sacos , preferentemente sacos abiertos, que comprende un dispositivo de llenado giratorio alrededor de un eje de rotación con […]
Aparato y procedimiento para transportar y llenar sacos, del 31 de Julio de 2019, de Statec Binder GmbH: Dispositivo para transportar y llenar sacos , preferentemente sacos abiertos, que comprende un dispositivo de llenado giratorio alrededor de un eje de rotación con […]
Dispositivo de suministro de bolsas, del 10 de Julio de 2019, de TOYO JIDOKI CO., LTD.: Un dispositivo de suministro de bolsas , usado en una máquina rotatoria de embalaje de llenado de bolsas equipada con una pluralidad de parejas de agarradores intermitentemente […]
Máquina envasadora con funcionalidad aumentada, particularmente para pequeñas bolsas preformadas, del 12 de Junio de 2019, de Umbra Packaging S.R.L: Una máquina envasadora con funcionalidad aumentada, particularmente para pequeñas bolsas preformadas, que comprende una pluralidad de estaciones de procesado […]