Sistema de detección de objetos para vehículo.
Un sistema de formación de imágenes para un vehículo que comprende:
un sensor matricial de formación de imágenes que comprende una pluralidad de píxeles fotosensores, estando colocado dicho sensor matricial de formación de imágenes en el vehículo y que tiene un campo de visión en el exterior del vehículo, siendo operable dicho sensor matricial de formación de imágenes para captar un conjunto de datos de imagen representativo de una escena que sucede en el exterior del vehículo y en el campo de visión exterior de dicho sensor matricial de formación de imágenes; y
un procesador para procesar dicho conjunto capturado de datos de imagen, incluyendo dicho procesador un microprocesador que comprende un algoritmo de detección de bordes, caracterizado porque dicho procesador selecciona un conjunto reducido de datos de imagen de dicho conjunto de datos de imagen y aplica dicho algoritmo de detección de bordes a dicho conjunto reducido de datos de imagen de dicho conjunto de datos de imagen para detectar bordes de objetos presentes en el exterior del vehículo y dentro de una zona seleccionada dentro del campo de visión exterior de dicho sensor de formación de imágenes, siendo representativo dicho conjunto reducido de datos de imagen de dicha zona seleccionada dentro del campo de visión exterior de dicho sensor de formación de imágenes, en el que dicho procesador es operable para procesar dicho conjunto reducido de datos de imagen más que otros datos de imagen de dicho conjunto de datos de imagen para detectar objetos presentes en el exterior del vehículo y dentro de dicha zona seleccionada, y en el que (i) dicha zona seleccionada abarca un área geográfica de la escena exterior en la que se puede esperar de manera realista que haya presente un objeto de interés para el conductor del vehículo y (ii) dichos otros datos de imagen son representativos de otras áreas geográficas 20 de la escena exterior en las que se espera de forma poco realista que haya presente o que no pueda haber presente un objeto de interés, en el que la zona seleccionada se selecciona según una entrada de ajuste,
comprendiendo dicha entrada de ajuste al menos uno de
(a) una salida procedente de un sensor de luz ambiental,
(b) un control de faros delanteros,
(c) un control manual,
(d) una condición diurna de conducción para el vehículo,
(e) una condición nocturna de conducción para el vehículo,
(f) el vehículo está desplazándose por o a lo largo de una sección curvada de carretera,
(g) una salida procedente de un sistema independiente de formación de imágenes orientado hacia delante,
(h) una condición de iluminación exterior, y
(i) un ajuste matemático de la altura de la imagen de la cámara, de forma que se ajuste la geometría de la zona seleccionada.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2003/013367.
Solicitante: DONNELLY CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 414 EAST FORTIETH STREET HOLLAND, MI 49423-5368 ESTADOS UNIDOS DE AMERICA.
Inventor/es: PAWLICKI,JOHN A, MCMAHON,MARTHA A, CHINN,STEVEN G, GIBSON,JOEL S.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60K31/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › Accesorios actuantes únicamente sobre una sola subunidad, para el control automático de la velocidad, p.ej. prevenir que la velocidad sobrepase un valor determinado o mantener una velocidad particular, seleccionada por el conductor del vehículo (accesorios actuantes sobre dos o más subunidades B60W 30/14; control del conjunto de propulsión en sí ver las clases o subclases apropiadas, p. ej. F02D; indicadores de velocidad G01P; sistemas o dispositivos para controlar la velocidad en general G05D 13/00).
- G01S11/12 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G06K9/00 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
- G06T7/00 G06 […] › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
PDF original: ES-2391556_T3.pdf
Fragmento de la descripción:
Sistema de detección de objetos para vehículo.
Campo de la invención
La presente invención versa, en general, acerca de sistemas de visión o de formación de imágenes para vehículos y está relacionada con sistemas de detección de objetos y, más en particular, con sistemas de formación de imágenes que son operables para determinar si un vehículo u objeto de interés se encuentra adyacente al presente vehículo, por delante del mismo o por detrás del mismo, para ayudar al conductor a cambiar de carril o a aparcar el vehículo. La presente invención también versa, en general, acerca de un sistema de aviso de salida del carril para un vehículo.
Antecedentes de la invención
Se han propuesto muchos dispositivos o sistemas de ayuda para el cambio de carril/de detección de objetos laterales/de aviso de salida del carril y similares que son operables para detectar un vehículo u otro objeto que se encuentra presente junto al vehículo equipado, por delante o por detrás del mismo o en un carril adyacente con respecto al vehículo equipado. Normalmente, tales sistemas utilizan metodologías estadísticas para analizar estadísticamente las imágenes capturadas por una cámara o un sensor en el vehículo para estimar si hay un vehículo u otro objeto adyacente al vehículo equipado. Dado que tales sistemas normalmente utilizan metodologías estadísticas para determinar una posibilidad o probabilidad de que un objeto detectado es un vehículo, y por otras razones, los sistemas pueden generar detecciones de falsos positivos, indicando el sistema que hay un vehículo adyacente, por delante o por detrás del presente vehículo cuando no hay ningún vehículo adyacente, por delante o por detrás del presente vehículo, o detecciones de falsos negativos, indicando el sistema, por ejemplo, que no hay ningún vehículo adyacente al presente vehículo cuando hay en realidad un vehículo en el carril adyacente.
Tales sistemas conocidos y propuestos son operables para analizar estadísticamente sustancialmente todos los píxeles en una imagen pixelada tal como es capturada por un dispositivo de captura de imágenes pixeladas o cámara. Además, tales sistemas pueden utilizar medios algorítmicos, tales como algoritmos de flujo o similares, para hacer un seguimiento sustancialmente de cada píxel o la mayoría de porciones de la imagen para determinar cuánto ha cambiado sustancialmente cada píxel o la mayoría de porciones de la imagen de un fotograma al siguiente. Tales algoritmos y sistemas de flujo de fotograma a fotograma pueden no ser capaces de realizar un seguimiento de un vehículo que se esté moviendo a una velocidad generalmente idéntica que la del vehículo equipado, dado que puede haber poco o ningún movimiento relativo entre los vehículos y, por consiguiente, poco o ningún cambio de un fotograma al siguiente. Dado que los sistemas pueden analizar de esta manera sustancialmente de forma continua sustancialmente cada píxel para sustancialmente cada fotograma capturado y hacer un seguimiento de tales píxeles y fotogramas de un fotograma al siguiente, tales sistemas pueden requerir controles caros de procesamiento y software de cálculo costoso para gestionar continuamente y procesar sustancialmente todos los datos sustancialmente de todos los píxeles sustancialmente en cada imagen o fotograma capturado.
En la actualidad se están desarrollando e implementando muchos sistemas de automoción de aviso de salida del carril (LDW) (también conocidos como sistemas de aviso de salida de la carretera) en los vehículos. Estos sistemas avisan a un conductor de un vehículo cuando su vehículo cruza las marcas laterales de la carretera o cuando hay una trayectoria clara que indica que lo harán de forma inminente. Normalmente, los avisos no se activan si los intermitentes correspondientes están encendidos, dado que significan que el conductor pretende realizar una maniobra de cambio de carril. Además, se pueden desactivar los sistemas de aviso por debajo de una cierta velocidad del vehículo. La interfaz del conductor para estos sistemas pueden tener la forma de un aviso visual (tal como un testigo de indicación) y/o un aviso audible (normalmente un sonido de banda sonora) . Una aplicación avisa a un conductor con una luz de indicación si el neumático del vehículo está cruzando la marca del carril y no se detecta ningún otro vehículo en el punto ciego correspondiente del conductor; y/o avisa adicionalmente al conductor con un aviso audible si el vehículo está cruzando al carril adyacente y hay un vehículo detectado en el punto ciego del conductor.
Existe una preocupación de que los sistemas actuales sean más una molestia o una distracción para el conductor de lo que será aceptable para el mercado de consumo. Utilizar los intermitentes como medio principal de indicar al sistema de aviso que la maniobra es intencionada no refleja patrones normales de conducción y, por lo tanto, muchas maniobras previstas provocarán un aviso. Dado que un conductor es molestado por avisos durante maniobras previstas, es probable que el conductor comenzará a ignorar los avisos, lo que puede tener como resultado un accidente cuando el aviso es apropiado.
Por lo tanto, existe una necesidad en la técnica de un sistema de detección de objetos, tal como un sistema de detección del punto ciego o un sistema de ayuda de cambio de carril o un sistema de aviso de salida del carril o similar, que supera las deficiencias de la técnica anterior.
VAN LEUVEN J ET AL: “Real-time vehicle tracking in image sequences” IMTC 2001. PROCEEDINGS OF THE 18THIEEE INSTRUMENTATION AND MEASUREMENT TECHNOLOGY CONFERENCE. BUDAPEST, HUNGRÍA, 21-23 DE MAYO DE 2001; [IEEE INSTRUMENTATION AND MEASUREMENT TECHNOLOGY CONFERENCE. (IMTC) :], NUEVA YORK, NUEVA YORK, EE. UU.: IEEE, US, vol. 3, 21 de mayo de 2001 () , páginas 2049-2054, XP010547308 ISBN: 978-0-7803-6646-6, da a conocer un sistema de formación de imágenes para capturar un conjunto de datos de imágenes representativo de una escena que se produce en el exterior del vehículo.
Intelligent vehicle technologies (theor y and applications) , (PP 119) Ljubo Vlacic, Michel Parent, Fumio Harashima publicado por Butterworth-Heinemann, ISBN, nº 0 7680 0780 1, da a conocer un sistema de formación de imágenes para un vehículo según la porción de delimitación previa de la Reivindicación 1.
La invención proporciona un sistema de formación de imágenes para un vehículo como se reivindica en la Reivindicación 1.
Las FIGURAS 11A-F son esquemas de una cámara virtual y características de la misma útiles para calcular una distancia desde la cámara del sistema de asistencia de cambio de carril hasta un objeto detectado en el campo de visión de la cámara;
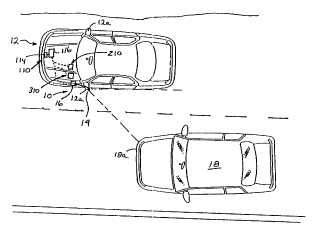
la FIG. 12 es una vista en planta de un vehículo que circula a lo largo de una carretera e incorpora un sistema de aviso de salida del carril de la presente invención; y
la FIG. 13 es otra vista en planta del vehículo que circula a lo largo de una carretera, con otro vehículo en un carril adyacente.
Descripción de las realizaciones preferentes
Con referencia ahora a los dibujos y a las realizaciones ilustrativas mostradas en los mismos, se coloca un sistema de detección de objetos o un sistema de formación de imágenes, tal como un sistema 10 de asistencia o de ayuda de cambio de carril, en un vehículo 12 y es operable para capturar una imagen de una escena que sucede hacia el lateral y hacia atrás en o a lo largo de uno o ambos lados del vehículo 12 (FIGURAS 1-4 y 6) . El sistema 10 de asistencia de cambio de carril comprende un dispositivo o sensor o cámara 14 de captura de imágenes y un control
o procesador 16 (FIGURAS 3, 9 y 10) . La cámara 14 captura una imagen de la escena que sucede hacia un lado respectivo del vehículo 12, y un procesador o control 16 procesa la imagen capturada para determinar si hay presente otro vehículo 18 en el lado del vehículo 12, como se expone a continuación. El control o el procesador 16 puede ser operable, además, para activar un indicador o medio de visualización o dispositivo 17 de señalización de aviso (FIG. 10) para alertar al conductor del vehículo 12 de que hay presente otro vehículo en el lado del vehículo
12. Se puede proporcionar la señal de aviso o de alerta al conductor del vehículo 12 en respuesta a la detección de otro vehículo en el área del punto ciego (como se muestra en la FIG. 1) y solo puede proporcionarse cuando el conductor del vehículo 12 acciona un... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de formación de imágenes para un vehículo que comprende:
un sensor matricial de formación de imágenes que comprende una pluralidad de píxeles fotosensores, estando colocado dicho sensor matricial de formación de imágenes en el vehículo y que tiene un campo de visión en el exterior del vehículo, siendo operable dicho sensor matricial de formación de imágenes para captar un conjunto de datos de imagen representativo de una escena que sucede en el exterior del vehículo y en el campo de visión exterior de dicho sensor matricial de formación de imágenes; y
un procesador para procesar dicho conjunto capturado de datos de imagen, incluyendo dicho procesador un microprocesador que comprende un algoritmo de detección de bordes, caracterizado porque dicho procesador selecciona un conjunto reducido de datos de imagen de dicho conjunto de datos de imagen y aplica dicho algoritmo de detección de bordes a dicho conjunto reducido de datos de imagen de dicho conjunto de datos de imagen para detectar bordes de objetos presentes en el exterior del vehículo y dentro de una zona seleccionada dentro del campo de visión exterior de dicho sensor de formación de imágenes, siendo representativo dicho conjunto reducido de datos de imagen de dicha zona seleccionada dentro del campo de visión exterior de dicho sensor de formación de imágenes, en el que dicho procesador es operable para procesar dicho conjunto reducido de datos de imagen más que otros datos de imagen de dicho conjunto de datos de imagen para detectar objetos presentes en el exterior del vehículo y dentro de dicha zona seleccionada, y en el que (i) dicha zona seleccionada abarca un área geográfica de la escena exterior en la que se puede esperar de manera realista que haya presente un objeto de interés para el conductor del vehículo y (ii) dichos otros datos de imagen son representativos de otras áreas geográficas de la escena exterior en las que se espera de forma poco realista que haya presente o que no pueda haber presente un objeto de interés, en el que la zona seleccionada se selecciona según una entrada de ajuste,
comprendiendo dicha entrada de ajuste al menos uno de
(a) una salida procedente de un sensor de luz ambiental,
(b) un control de faros delanteros,
(c) un control manual,
(d) una condición diurna de conducción para el vehículo,
(e) una condición nocturna de conducción para el vehículo,
(f) el vehículo está desplazándose por o a lo largo de una sección curvada de carretera,
(g) una salida procedente de un sistema independiente de formación de imágenes orientado hacia delante,
(h) una condición de iluminación exterior, y
(i) un ajuste matemático de la altura de la imagen de la cámara, de forma que se ajuste la geometría de la zona seleccionada.
2. El sistema de formación de imágenes de la reivindicación 1, en el que dicho sistema de formación de imágenes comprende un sistema de asistencia de cambio de carril con dicho conjunto de formación de imágenes operable para capturar una imagen de la escena exterior dentro del campo de visión del conjunto de formación de imágenes.
3. El sistema de formación de imágenes de cualquier reivindicación precedente, en el que dicho procesador está en comunicación con un sistema de formación de imágenes orientado hacia delante, comunicando dicho sistema de formación de imágenes orientado hacia delante al menos una de información de tráfico en sentido contrario, información de tráfico precedente e información de marcas de carril a dicho procesador.
4. El sistema de formación de imágenes de cualquier reivindicación precedente, en el que dicho procesador es operable para proporcionar una indicación de aviso a un conductor del presente vehículo en respuesta a al menos dos condiciones detectadas por dicho sistema de formación de imágenes, en el que dicho procesador proporciona un primer aviso en respuesta a una detección de que el presente vehículo se encuentra en vías de dejar la superficie de la carretera y desplazarse al arcén de la carretera y un segundo aviso en respuesta a la detección de que el presente vehículo se encuentra en vías de dejar el arcén y la superficie de la carretera.
5. El sistema de formación de imágenes de cualquier reivindicación precedente, en el que dicho sistema de formación de imágenes está en comunicación con un sistema pasivo de guiado operable para ajustar una dirección de guiado del vehículo en respuesta a una detección por medio de dicho sistema de formación de imágenes de que el vehículo está desviándose o saliéndose de su carril ocupado.
6. El sistema de formación de imágenes de cualquier reivindicación precedente, en el que dicho sistema de formación de imágenes está en comunicación con un control adaptable de la velocidad operable para ajustar una configuración de control de crucero del vehículo en respuesta a las condiciones detectadas de la carretera
o del tráfico por medio de dicho sistema de formación de imágenes.
7. El sistema de formación de imágenes de cualquier reivindicación precedente, en el que dicho sistema de formación de imágenes es operable de forma selectiva para proporcionar datos de imagen a un dispositivo remoto que se encuentra alejado del vehículo, en el que dicho sistema de formación de imágenes proporciona dichos datos de imagen para indicar una ubicación y/o condición del vehículo.
8. El sistema de formación de imágenes de la reivindicación 7, en el que dicho dispositivo remoto comprende al menos uno de un sistema de visualización personal, un sistema de visualización de seguridad y un sistema de visualización de emergencia.
9. El sistema de formación de imágenes de cualquier reivindicación precedente, en el que dicho procesador es operable para ajustar dicho conjunto reducido de datos de imagen y dicha zona seleccionada entre una zona diurna y una zona nocturna en respuesta a una condición diurna o nocturna de conducción para el vehículo.
10. El sistema de formación de imágenes de la reivindicación 9, en el que dicho procesador es operable para ajustar una entrada de altura de dicho sensor matricial de formación de imágenes, de forma que dicha zona diurna sea representativa de un área generalmente a lo largo de la superficie de la carretera y dicha zona nocturna sea representativa de un área generalmente a una altura de los faros delanteros de los vehículos.
11. El sistema de formación de imágenes de cualquier reivindicación precedente, en el que dicho procesador es operable para ajustar dicho conjunto reducido de datos de imagen y dicha zona seleccionada en respuesta a una distancia hasta un objeto detectado.
12. El sistema de formación de imágenes de cualquier reivindicación precedente, en el que dicho procesador es operable para aproximar una distancia a una porción de algunos de dichos objetos detectados en respuesta a una ubicación de los píxeles de la porción en dicha imagen capturada.
13. El sistema de formación de imágenes de la reivindicación 12, en el que dicha ubicación de los píxeles es determinada con respecto a un píxel seleccionado que está dirigido, en general, al horizonte y a lo largo de la dirección de desplazamiento del vehículo.
14. El sistema de formación de imágenes de la reivindicación 12, en el que dicho procesador es operable para aproximar dicha distancia en respuesta a un tamaño de píxel, una resolución de píxeles y un campo de visión de dicho sensor matricial de formación de imágenes.
15. El sistema de formación de imágenes de la reivindicación 1, en el que dicho procesador es operable para procesar bordes detectados horizontales y limitar sustancialmente el procesamiento de bordes verticales detectados.
16. El sistema de formación de imágenes de la reivindicación 1, en el que dicho procesador es operable para procesar bordes horizontales detectados y limitar sustancialmente el procesamiento de bordes verticales detectados y reducir la cantidad de datos que van a ser procesados corriente abajo.
17. El sistema de formación de imágenes de la reivindicación 1, en el que dicho procesador es operable para procesar bordes detectados que tienen una concentración de bordes en un segundo conjunto reducido de datos de imagen que es representativo de una zona o área reducida particular de dicha zona seleccionada de dicha imagen capturada.
18. El sistema de formación de imágenes de la reivindicación 1, en el que dicho procesador es operable para limitar sustancialmente el procesamiento de bordes detectados que tienen una intensidad menor que una intensidad umbral.
19. El sistema de formación de imágenes de la reivindicación 1, en el que dicho procesador es operable para determinar si dichos bordes detectados constituyen una porción de un vehículo en un carril adyacente.
20. El sistema de formación de imágenes de la reivindicación 19, en el que dicho procesador es operable para determinar que dichos bordes detectados puedan constituir una porción de un vehículo en respuesta a una determinación de que dichos bordes detectados están asociados con una elipse o elipse parcial, siendo indicativas dicha elipse o elipse parcial del neumático de un vehículo.
21. El sistema de formación de imágenes de cualquier reivindicación precedente, en el que dicho procesador es operable para hacer un seguimiento de al menos uno de dichos bordes detectados entre fotogramas subsiguientes capturados por dicho sensor matricial de formación de imágenes para identificar algunos de dichos bordes detectados.
22. El sistema de formación de imágenes de cualquier reivindicación precedente, en el que dicho procesador es operable para procesar principalmente bordes detectados o limitar sustancialmente el procesamiento de bordes detectados en respuesta a al menos uno de un tamaño, una ubicación, una intensidad y una distancia de dichos bordes detectados con respecto al vehículo.
23. El sistema de formación de imágenes de cualquier reivindicación precedente, en el que dicho procesador es operable para identificar marcas de carril o de carretera en dichas imágenes capturadas para determinar la curvatura de la carretera de la sección de la carretera por la que está desplazándose el vehículo, en el que dicho procesador es operable para ajustar dicho conjunto reducido de datos de imagen y dicha zona seleccionada en respuesta a una identificación de una curva en la sección de la carretera.
Patentes similares o relacionadas:
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Estimación de una postura basada en la silueta, del 24 de Junio de 2020, de VIZRT AG: Un método implementado por ordenador para estimar una postura de un modelo de objeto articulado , en el que el modelo de objeto articulado […]