Sistema de control para una pieza de manipulación de carga.
Sistema de control para una pinza de manipulación de carga (10) con una primera (20) y una segunda (22)superficie de acoplamiento de carga para agarrar y soltar selectivamente una carga de artículos dispuesta entredichas superficies,
siendo al menos una de dichas superficies movible selectivamente hacia la otra mediante unaccionador hidráulico (26,28), teniendo dicha carga un perfil geométrico, y dicho sistema de control comprendiendo:(a) al menos una válvula de fluido (11) para regular de manera variable una presión de sujeción hidráulicamáxima capaz de hacer que dicho accionador mueva una de dichas superficies hacia la otra en un movimientode sujeción de la carga;
(b) al menos un sensor de la geometría de la carga (50) que puede funcionar para producir un efecto eléctricoque varía como una función de dicho perfil geométrico de dicha carga;
(c) un receptor de datos (32) que puede funcionar para obtener información relacionada con al menos unacaracterística de dicha carga distinta a dicho perfil geométrico; y
(d) un controlador (40) en comunicación con dicho sensor de la geometría de la carga (50) y dicho receptor dedatos, y conectado a dicha válvula (11) y que puede funcionar para la regulación del control por dicha válvula dedicha presión de sujeción hidráulica máxima, para recibir datos de la geometría de la carga relacionados condicho efecto eléctrico, para recibir datos de identificación de la carga relacionados con dicha información,caracterizado por el hecho de que el controlador selecciona de forma variable dicha presión de sujeciónhidráulica máxima en respuesta a dichos datos de la geometría de la carga y dichos datos de identificación de lacarga.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2009/002127.
Solicitante: CASCADE CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 2201 NE 201st Avenue Fairview, OR 97024 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MCKERNAN,Pat S, NAGLE,Greg A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66F9/18 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › Medios para retener o sujetar la carga.
- B66F9/22 B66F 9/00 […] › Dispositivos o sistemas hidráulicos.
- B66F9/24 B66F 9/00 […] › Dispositivos o sistemas eléctricos.
PDF original: ES-2384367_T3.pdf
Fragmento de la descripción:
Sistema de control para una pinza de manipulación de carga
ANTECEDENTES DE LA INVENCIÓN
La presente invención se refiere a mejoras en los sistemas de sujeción de la carga de energía fluida con control de la fuerza de sujeción máxima automáticamente variable, para optimizar la versatilidad y velocidad mediante las cuales una amplia variedad de diferentes tipos de carga de un almacén u otra instalación de almacenamiento pueden ser agarrados correctamente de una manera adaptativa automáticamente a cada tipo de carga y configuración.
Las pinzas de manipulación de carga típicamente funcionan en una instalación de almacenamiento o de transporte tal como un almacén o centro de distribución y debe frecuentemente ser capaz de manipular más de un tipo, o variedad, de carga. Las pinzas en algunas de estas instalaciones encuentran un número relativamente pequeño de diferentes tipos de carga. Por ejemplo, una pinza de manipulación de carga que es usada en un centro de distribución para un fabricante grande de electrodomésticos puede encontrar lavavajillas, lavadoras, secadoras de ropa y frigoríficos casi exclusivamente. En otras instalaciones, las pinzas de manipulación de carga encontrarán una variedad mucho más amplia de tipos de carga. Los aparatos del ejemplo precedente pueden, por ejemplo, ser enviados a un almacén para una gran tienda al por menor. El almacén puede también contener ordenadores, muebles, televisiones, etc. Una pinza puede, por tanto, encontrar cajas de cartón con apariencias y dimensiones externas similares, pero con productos que tienen requisitos diferentes de fuerza de sujeción máxima óptima debido a las diferentes características de la carga tal como peso, fragilidad, embalaje, etc. También puede no hacer falta siempre una pinza para agarrar el mismo número de cajas de cartón. Por ejemplo, una pinza se puede utilizar para mover simultáneamente cuatro cajas de frigoríficos, luego mover una única caja de lavavajillas, y finalmente una única caja de frigorífico adicional, presentando geometrías de carga diferentes teniendo también diferentes requisitos de fuerza de sujeción máxima óptima, independientes de aquellos que se desprenden de las características de la carga precedentes.
Sistemas de sujeción de energía fluida con limitaciones automáticamente variables en la fuerza de sujeción normalmente imponen tales limitaciones en un modo que limita la velocidad con la que las superficies de acoplamiento de la carga se pueden cerrar en el contacto inicial con la carga, limitando así la productividad del sistema de sujeción de la carga. Este problema ha sido reducido en el pasado permitiendo presiones de cierre de fluido máximas más altas que la presión hidráulica máxima óptima durante el cierre inicial y luego, cuando la carga está a punto de entrar en contacto con las superficies de acoplamiento de la carga, disminuyendo el límite de presión hidráulica máxima a un límite en o por debajo del límite óptimo para sujetar la carga. Sin embargo, este último método, aunque más rápido, no ha sido previamente utilizable de forma compatible con entradas complejas implicando tanto geometrías de la carga como características de la carga como se ha descrito anteriormente.
Un aparato según el preámbulo de la reivindicación independiente 1 se conoce de la publicación EP 0995557A.
Conforme a la invención, se proporciona un sistema de control para una pinza de manipulación de carga como se establece en la reivindicación 1. Otros aspectos preferidos de la invención se establecen en las reivindicaciones dependientes en la reivindicación 1.
BREVE DESCRIPCIÓN DE LAS DIFERENTES VISTAS DE LOS DIBUJOS
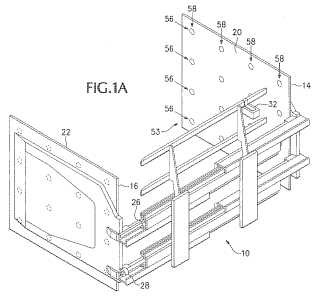
FIG. 1A es una vista en perspectiva de una forma de realización ejemplar de una pinza de manipulación de carga que incluye el presente sistema de control.
FIG. 1B ilustra la pinza de manipulación de carga de la FIG. 1A con una carga sujeta.
FIG. 2 es un esquema eléctrico e hidráulico que ilustra una forma de realización ejemplar del presente sistema de control.
FIG. 2A es una forma de realización ejemplar alternativa parcial del circuito mostrado en la FIG. 2.
FIG. 3A ilustra una vista en planta de la pinza mostrada en la FIG. 1A.
FIG. 3B ilustra una vista en planta de la pinza mostrada en la FIG. 3A con una carga dispuesta entre los brazos de la pinza.
FIG. 3C ilustra una vista en planta de la pinza mostrada en la FIG. 3A con una carga dispuesta entre los brazos de la pinza.
FIG. 3D ilustra una vista en planta de la pinza mostrada en la FIG. 3A con una carga agarrada por los brazos de la pinza.
FIG. 4A es un diagrama de flujo que muestra la primera sección de la lógica de control para una forma de realización ejemplar del presente sistema de control.
FIG. 4B es un diagrama de flujo que muestra la segunda sección de la lógica de control para una forma de realización ejemplar del presente sistema de control.
DESCRIPCIÓN DETALLADA DE UNA FORMA DE REALIZACIÓN EJEMPLAR
Una pinza de manipulación de carga para su uso con una forma de realización ejemplar del presente sistema de control de fuerza de sujeción automatizado se indica generalmente como 10 en las FIGS. 1A y 1B. La pinza ejemplar 10 es una pinza de brazo deslizable, accionado hidráulicamente, que tiene un bastidor 11 adaptado para su montaje en un carro de carretilla elevadora que se corresponde selectivamente linealmente a lo largo de un mástil vertical de levantamiento de carga, convencional, basculante y accionado hidráulicamente (no mostrado) . La pinza del brazo deslizable ejemplar 10 en particular representada en los dibujos es para la manipulación de objetos prismáticos tal como cajas o paquetes 12 en la FIG. 1B, y podría ser de cualquier diseño de brazo deslizable adecuado. Los brazos de pinza 14, 16 son deslizables selectivamente desde o hacia el uno al otro en perpendicular al plano de superficies de acoplamiento de la carga 20, 22. Los cilindros hidráulicos 26, 28 se extienden selectivamente o retraen los brazos de pinza respectivos 20, 22. Una caja de cartón tal como 12 podría resultar dañada si se somete a una sobresujeción excesiva para evitar el deslizamiento. Por otro lado, una infrasujeción pueden hacer que la caja de cartón 12 se resbale de la sujeción friccional de la pinza 10.
Aunque una pinza de cajas accionada hidráulicamente 10 es descrita aquí como una forma de realización ejemplar, el sistema de sujeción de la carga aquí es también aplicable a muchos otros tipos de pinzas de carga. Por ejemplo, una pinza para bobinas de papel accionada hidráulicamente con un brazo pivotado podría ser configurada conforme al presente sistema de sujeción de la carga.
La forma de realización ejemplar del presente sistema de control de fuerza de sujeción automático puede incluir un receptor de datos, tal como un lector de código electrónico 32 dispuesto en la pinza 10. En cooperación con la implementación de la forma de realización ejemplar del presente sistema, los artículos que han de ser agarrados pueden ser ventajosamente etiquetados con etiquetas codificadas 34. La etiqueta codificada 34 debería contener información suficiente para ayudar al presente sistema de sujeción de la carga a determinar, como se describirá de aquí en adelante, una fuerza de sujeción máxima apropiada para el artículo etiquetado. La etiqueta codificada 34 puede, por ejemplo, comunicar una cadena de datos digital con la identidad de carga (LOAD ID) del artículo, u otra indicación de identificación de características directa o indirecta.
Una carga puede estar compuesta por una o más unidades etiquetadas y, por lo tanto, la fuerza de sujeción apropiada para el artículo etiquetado individual puede o no ser apropiada para la carga entera. Formas de realización del presente sistema utilizan otras técnicas, como se describirá de aquí en adelante, para realizar esta determinación.
El lector de código electrónico 32 se coloca para leer la etiqueta codificada 34 en al menos un artículo preparando una carga presentada a la pinza de manipulación de carga 10. El lector de código electrónico puede funcionar automáticamente, por ejemplo, buscando una etiqueta codificada siempre que los brazos de la pinza están en una posición abierta o siempre que una carga es detectada entre los brazos de la pinza, como se describirá con más detalle a continuación. Alternativamente, el lector de código... [Seguir leyendo]
Reivindicaciones:
1. Sistema de control para una pinza de manipulación de carga (10) con una primera (20) y una segunda (22) superficie de acoplamiento de carga para agarrar y soltar selectivamente una carga de artículos dispuesta entre dichas superficies, siendo al menos una de dichas superficies movible selectivamente hacia la otra mediante un accionador hidráulico (26, 28) , teniendo dicha carga un perfil geométrico, y dicho sistema de control comprendiendo:
(a) al menos una válvula de fluido (11) para regular de manera variable una presión de sujeción hidráulica máxima capaz de hacer que dicho accionador mueva una de dichas superficies hacia la otra en un movimiento de sujeción de la carga;
(b) al menos un sensor de la geometría de la carga (50) que puede funcionar para producir un efecto eléctrico que varía como una función de dicho perfil geométrico de dicha carga;
(c) un receptor de datos (32) que puede funcionar para obtener información relacionada con al menos una característica de dicha carga distinta a dicho perfil geométrico; y
(d) un controlador (40) en comunicación con dicho sensor de la geometría de la carga (50) y dicho receptor de datos, y conectado a dicha válvula (11) y que puede funcionar para la regulación del control por dicha válvula de dicha presión de sujeción hidráulica máxima, para recibir datos de la geometría de la carga relacionados con dicho efecto eléctrico, para recibir datos de identificación de la carga relacionados con dicha información, caracterizado por el hecho de que el controlador selecciona de forma variable dicha presión de sujeción hidráulica máxima en respuesta a dichos datos de la geometría de la carga y dichos datos de identificación de la carga.
2. Sistema de control según la reivindicación 1, donde dicho sensor de la geometría de la carga (50) produce un segundo efecto eléctrico que varía proporcionalmente con una magnitud instantánea de una dimensión de un espacio intermedio entre dicha primera superficie de acoplamiento de la carga (20) y dicha carga (12) y dicho controlador puede además funcionar para seleccionar una magnitud objetivo de dicha dimensión usando dichos datos de la geometría de la carga, estando dicha magnitud objetivo relacionada con una duración temporal de hacer que dicho conjunto de válvula regule dicho movimiento de sujeción de la carga a un nivel de presión sustancialmente no inferior a dicha presión hidráulica máxima, recibir datos de proximidad relacionados con dicha magnitud instantánea durante dicho movimiento de cierre de la pinza inicial, e iniciar dicho movimiento de sujeción de la carga al determinar que dicha magnitud instantánea no es mayor que dicha magnitud objetivo.
3. Sistema de control según la reivindicación 2, donde dicha dimensión se mide a lo largo de un eje perpendicular a dicha al menos una de dichas superficies de acoplamiento de la carga (20, 22) .
4. Sistema de control según la reivindicación 2, que comprende además un lector de código (32) para recibir datos de identificación de la carga relacionados con una característica de dicha carga (12) y donde dicho controlador (40) está en comunicación con dicho lector de código y puede funcionar para recibir dichos datos de identificación de la carga de dicho lector de código y usar dichos datos de identificación de la carga en la selección de dicho espacio intermedio objetivo.
5. Sistema de control según la reivindicación 1, que comprende además una pluralidad de sensores de la geometría de la carga (50) , dicha pluralidad de sensores de la geometría de la carga siendo inclusiva de dicho sensor de la geometría de la carga, cada uno puede funcionar para producir un efecto eléctrico que varía como una función de dicho perfil geométrico de dicha carga y dicho controlador (40) puede funcionar para recibir datos de geometría de la carga relacionados con el efecto eléctrico producido por dicha pluralidad de sensores.
6. Sistema de control según la reivindicación 5, donde dicha pluralidad de sensores de la geometría de la carga (50) se disponen en al menos una de dichas superficies de acoplamiento de la carga (20, 22) .
7. Sistema de control según la reivindicación 5 donde dicha pluralidad de sensores de la geometría de la carga (50) comprende una primera (53) y una segunda (54) matriz de rejilla, estando dichas primera y segunda matriz de rejilla dispuestas en dichas primera (20) y segunda (22) superficie de acoplamiento de la carga respectivamente.
8. Sistema de control según la reivindicación 1, donde dicho sensor de la geometría de la carga (50) se dispone en al menos una de dichas superficies de acoplamiento de la carga (20, 22) .
9. Sistema de control según la reivindicación 1, donde dicho sensor de la geometría de la carga (50) detecta la presencia de una carga (12) situada entre dichas primera (20) y segunda (22) superficie de acoplamiento de la carga.
10. Sistema de control según la reivindicación 1, que comprende además almacenamiento de datos legible por máquina (62) incluyendo una tabla de consulta legible por máquina y donde dicho controlador (40) usa dichos datos
de la geometría de la carga como clave en dicha tabla de consulta, comprendiendo dicha tabla de consulta al menos dicha presión de sujeción hidráulica máxima para al menos un identificador de tipo de carga.
11. Pinza de manipulación de carga según la reivindicación 1, donde dicha presión de sujeción hidráulica máxima es 5 una presión de sujeción óptima para la sujeción de dicha carga (12) .
12. Sistema de control según la reivindicación 1, siendo dicho controlador (40) capaz de permitir que dicho accionador (26, 28) mueva una de dichas superficies (20, 22) hacia la otra en un movimiento de cierre de pinza inicial a una presión de cierre hidráulica máxima mayor que dicha presión de sujeción hidráulica máxima preparatorio para dicho movimiento de sujeción de la carga, y después de ello permitir dicho movimiento de sujeción de la carga a un nivel de presión sustancialmente no mayor que dicha presión de sujeción hidráulica máxima.
Patentes similares o relacionadas:
Aparato de carro de horquilla para una carretilla elevadora y conjunto de válvula para este, del 13 de Mayo de 2020, de Lift Technologies, Inc: Un aparato de carro de horquilla para una carretilla elevadora y configurado para tirar de una carga, que comprende: a) un conjunto de bastidor de montaje , montable […]
Dispositivo de acoplamiento y procedimiento, del 1 de Abril de 2020, de KAUP GMBH & CO. KG GESELLSCHAFT FUR MASCHINENBAU: Dispositivo de acoplamiento , que se va a colocar en un vehículo de elevación , con un medio de sujeción que comprende, como mínimo, dos elementos de sujeción […]
Abrazadera con un cilindro hidráulico de sujeción de carga con múltiples etapas telescópicamente extensibles, adaptadas para aplicar la fuerza de sujeción de carga alternativamente sensible a la fuerza de elevación de carga o al tamaño de la carga, del 3 de Julio de 2019, de CASCADE CORPORATION: Un sistema hidráulico de sujeción y elevación de carga que incluye al menos un cilindro hidráulico de sujeción de carga de un tipo con al menos una […]
Vehículo elevador con un brazo elevador telescópico provisto de un sistema de absorción de impactos, del 19 de Junio de 2019, de MERLO PROJECT S.R.L.: Vehículo elevador que incluye: • un chasis autopropulsado, • un brazo telescópico provisto en un extremo distal de un accesorio […]
Sistema de control hidráulico para equipos de manipulación de cargas móviles, del 20 de Marzo de 2019, de CASCADE CORPORATION: Un sistema de control hidráulico para regular flujos respectivos de fluido hidráulico a través de un par de accionadores hidráulicos (A, B) para permitir que dichos accionadores […]
Sistema de control para un aparato de manipulación de cargas, del 13 de Septiembre de 2017, de J.C. BAMFORD EXCAVATORS LIMITED: Un sistema de control para una máquina que incluye un aparato de manipulación de carga, siendo la carga (L) movible con respecto a […]
Equipo de elevación de palas y otros componentes de aerogeneradores con sistema de sujeción por rozamiento., del 7 de Julio de 2016, de RUIZ ECHEVARRÍA, Armando Manuel: 1. Equipo de elevación de palas eólicas u otras piezas pesadas o voluminosas, caracterizado por un sistema de sujeción basado en el rozamiento entre la pieza a elevar […]
Circuito de válvula hidráulica con anulador para control de daños, del 5 de Noviembre de 2014, de CASCADE CORPORATION: Sistema que comprende un conjunto de dispositivos de potencia hidráulica bidireccionales y un controlador capaz de limitar […]