SISTEMA AUTOMÁTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO A UN SUSTRATO MÓVIL.
Sistema automático de alineación de impresión inkjet industrial respecto a un sustrato móvil,
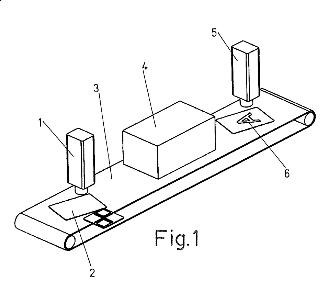
de los que el sustrato móvil sobre el que se va a imprimir avanza, posicionado por medio de los correspondientes posicionadores, sobre una cinta transportadora hacia los medios de impresión, que comprende: una primera cámara (1) que captura la posición de un sustrato móvil (2) a imprimir; una unidad de control (4) a la que la primera cámara (1) transfiere los datos analizados, posición y ángulo, y en base a los que, mediante la implementación de un algoritmo, transforma la imagen contenida en su memoria para ajustarla a la posición del sustrato y proceder a su impresión, y; una FPGA (Field Programmable Gate Array), en la unidad de control (4), permitiendo una rápida configuración del sistema de impresión frente a cambios en el sustrato, evitando paradas ante el cambio de referencias en un proceso de impresión industrial, mejorando la productividad.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030161.
Solicitante: FUNDACION CETENA.
Nacionalidad solicitante: España.
Inventor/es: PEREZ ABADIA, MARIANO, VARELA LÓPEZ,FERNANDO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B41J2/01 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B41 IMPRENTA; MAQUINAS COMPONEDORAS DE LINEAS; MAQUINAS DE ESCRIBIR; SELLOS. › B41J MAQUINAS DE ESCRIBIR; MECANISMOS DE IMPRESION SELECTIVA, es decir, MECANISMOS QUE IMPRIMEN DE OTRA MANERA QUE NO SEA POR UTILIZACION DE FORMAS DE IMPRESION; CORRECCION DE ERRORES TIPOGRAFICOS (composición B41B; impresión sobre superficies especiales B41F; marcado para el lavado B41K; raspadores, gomas o dispositivos para borrar B43L 19/00; productos fluidos para corregir errores tipográficos por recubrimiento C09D 10/00; registro en materia de medidas G01; reconocimiento o presentación de datos, marcado de soportes de registro en forma numérica, p. ej. por punzonado, G06K; aparatos de franqueo o aparatos de impresión y entrega de tiquets G07B; conmutadores eléctricos para teclados, en general H01H 13/70, H03K 17/94; codificación en relación con teclados o dispositivos similares, en general H03M 11/00; emisores o receptores para transmisión de información numérica H04L; transmisión o reproducción de imágenes o de dibujos invariables en el tiempo, p. ej. transmisiones en facsímil, H04N 1/00; mecanismos de impresión especialmente adaptados para aparatos, p. ej. para cajas-registradoras, máquinas de pesar, produciendo un registro de su propio funcionamiento, ver las clases apropiadas). › B41J 2/00 Máquinas de escribir o mecanismos de impresión selectiva caracterizados por el procedimiento de impresión o de marcado para el cual son concebidas (montaje, arreglo o disposición de los tipos o de las matrices B41J 1/00; procedimientos de marcado B41M 5/00; estructura o fabricación de las cabezas, p. ej. cabezas de variación de inducción, para el registro por magnetización o desmagnetización de un soporte de registro G11B 5/127; cabezas para la reproducción de información capacitiva G11B 9/07). › con chorro de tinta.
- B41J29/393 B41J […] › B41J 29/00 Partes constitutivas o accesorios para máquinas de escribir o mecanismos de impresión selectivas no previstos en otro lugar. › Dispositivos de control o de análisis del conjunto de la máquina.
- G06K15/02 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › G06K 15/00 Disposiciones para producir una presentación visual permanente de los datos de salida (impresión o trazado combinado con otra operación, p. e., con traslado, G06K 17/00). › que utilizan impresoras.
- G06T7/00 G06 […] › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
Fragmento de la descripción:
Sistema automático de alineación de impresión inkjet industrial respecto a un sustrato móvil.
OBJETO DE LA INVENCIÓN.
La siguiente invención, según se expresa en el enunciado de la presente memoria descriptiva, se refiere a un sistema automático de alineación de impresión inkjet industrial respecto a un sustrato móvil, siendo del tipo de sistemas en los que el sustrato móvil sobre el que se va a imprimir avanza, posicionado por medio de los correspondientes posicionadores, sobre una cinta transportadora hacia los medios de impresión, teniendo el sistema propuesto por objeto esencial detectar y comunicar la forma y posición de un sustrato móvil, carente de elementos posicionadores, en tiempo real a una unidad de control de imágenes, ejecutando un control activo sobre la posición de la imagen respecto del sustrato móvil.
Con ello se permite una rápida configuración del sistema de impresión frente a cambios en el sustrato, evitando paradas ante el cambio de referencias en un proceso de impresión industrial mejorando la productividad.
CAMPO DE APLICACIÓN.
En la presente memoria se describe un sistema automático de alineación de impresión inkjet industrial respecto a un sustrato móvil, de aplicación para el equipamiento de sistemas de impresión inkjet industrial y más especialmente en los sistemas de visión artificial para detección de un sustrato móvil a imprimir.
ANTECEDENTES DE LA INVENCIÓN.
Como es conocido, los sistemas de visión artificial se hallan presentes en varios procesos industriales en los cuales se requiere la detección e identificación de formas para su uso dentro de un proceso de fabricación, montaje o distribución. En este tipo de sistemas, un detector envía a un procesador información sobre la forma, posición, rotación relativa a un punto, color, etc., para que éste, a partir de un programa, ejecute una serie de comandos.
Los sistemas de impresión digital inkjet permiten el control de un conjunto de inyectores y cabezales, los cuales son capaces de formar una imagen mediante la superposición de gotas sobre un sustrato. Esta imagen se encuentra en una memoria, a la cual accede el procesador para generar la serie de comandos que permiten formar una imagen. En el caso de sistemas de impresión inkjet de paso único, esta imagen se repite un número indefinido de veces, hasta que una nueva imagen es cargada en la memoria. Dado que la imagen se forma sobre un sustrato en movimiento relativo a los inyectores, la alineación de éstos respecto al sustrato debe respetarse entre las diferentes impresiones, de forma de reproducir adecuadamente la imagen transferida.
Para cumplir con ese cometido, los sustratos se introducen en el sistema de impresión mediante alimentadores tales como cintas de cadena, bandas de guiado, robots, reciprocadores y otros dispositivos tendientes a mantener una referencia fija entre el sustrato a imprimir y el cabezal de impresión. Estos desarrollos suelen ser específicos para cada tipo de sustrato, y en el caso de cambios en el tipo de sustrato, este transporte y posicionador requiere ajustes que consumen tiempo y restan productividad al sistema de impresión.
DESCRIPCIÓN DE LA INVENCIÓN.
En la presente memoria se describe un sistema automático de alineación de impresión inkjet industrial respecto a un sustrato móvil, siendo del tipo de sistemas en los que el sustrato móvil sobre el que se va a imprimir avanza, posicionado por medio de los correspondientes posicionadores, sobre una cinta transportadora hacia los medios de impresión, de forma que el sistema comprende:
• una primera cámara que captura la posición de un sustrato móvil a imprimir, carente de elementos posicionadores, sobre una cinta transportadora y analiza los datos capturados;
• una unidad de control a la que la primera cámara transfiere los datos analizados, posición y ángulo, y en base a los cuales, mediante la implementación de un algoritmo, transforma la imagen contenida en su memoria para ajustarla a la posición del sustrato y proceder a su impresión, y;
• una FPGA (Field Programmable Gate Array) .
La primera cámara incorpora un medio detector, en sentido transversal a la cinta transportadora del sustrato móvil, para la activación del disparo de captura, de manera que ante un cambio de contraste genera una señal que comanda el encendido de la iluminación y la apertura del obturador de la cámara para efectuar el disparo de captura de la imagen. Una vez capturada la imagen, la cámara define una señal de aviso (flag=1) que indica que se ha capturado una imagen.
Por otra parte, la primera cámara de captura de la forma y posición del sustrato móvil calcula la posición X0 e Y0 del punto del sustrato móvil que provoca la activación del disparo y su ángulo "a" respecto a la dirección de impresión. Una vez enviados los datos, la cámara define una señal de aviso (flag=0) para indicar que está lista para recibir un nuevo sustrato.
Asimismo, el sistema incorpora, tras la zona de impresión, unos medios de verificación de la impresión, cuyos medios se definen por una segunda cámara que captura la imagen de la impresión realizada en el sustrato móvil para su procesado, según un proceso inverso al citado, y su comparación con la imagen de referencia guardada en la memoria de datos.
Así, la imagen capturada tras la zona de impresión es procesada mediante una operación de multiplicación lógica, superponiendo la imagen capturada con la imagen original guardada en la memoria de datos, y en función del grado de correlación entre ambas acepta o rechaza la imagen impresa.
En una variante de ejecución práctica de la invención el sistema comprende:
• una primera cámara que captura la posición y forma de un sustrato móvil a imprimir, carente de elementos posicionadores, sobre una cinta transportadora y analiza los datos capturados;
• una unidad de control a la que la primera cámara transfiere los datos analizados, posición y ángulo, y en base a los cuales, mediante la implementación de un algoritmo, transforma la imagen contenida en su memoria para ajustarla a la posición del sustrato y proceder a su impresión;
• una FPGA (Field Programmable Gate Array) , y;
• una serie de formas u otras características grabadas en la memoria de datos de la unidad de control.
De esta forma, la forma u otra característica capturada por la primera cámara y enviada a la unidad de control es comparada con una serie de formas u otras características de referencia grabadas en la memoria de datos de dicha unidad de control, pasando a formar parte de la imagen de referencia la imagen seleccionada.
El algoritmo para la transformación de la imagen se basa en un barrido de la imagen inicial con un enrejado sobremuestreado, cuya imagen inicial es dividida en subimagenes que son descargadas en la memoria interna de la FPGA y de forma directa ser rotadas.
Para la generación de la subimagen final, subimagen rotada, se identifica, mediante su coordenada, sus pixeles asociados mediante el giro de las coordenadas de la subimagen inicial almacenada en la FPGA de forma sobremuestreada.
Dado que las coordenadas de la imagen final, normalmente no son enteras, se selecciona la pareja de coordenadas más próximas y se calcula el valor del pixel, mediante la búsqueda de los pixeles de la subimagen original almacenada en la FPGA.
Por otra parte, dado que al realizar las búsqueda en la imagen inicial las coordenada no son enteras, es necesaria una interpolación mediante los valores de los píxeles vecinos más próximos, cuya contribución individual a la interpolación se realizará en paralelo mediante el almacenamiento en diferentes bancos de memoria en la FPGA de versiones submuestreadas de la subimagen inicial asociadas a la posición dentro de la ventana de interpolación.
Con esta estrategia se evita la penalización en el acceso a la memoria externa a la FPGA de los píxeles de la imagen inicial en el proceso de generación de cada píxel de la imagen final. Solo accedemos a los que hemos descargado en forma de subimagen a la FPGA.
Para complementar la descripción que seguidamente se va a realizar, y con objeto de ayudar a una mejor comprensión de las características de la invención, se acompaña a la presente memoria descriptiva, de un juego de planos, en cuyas figuras de forma ilustrativa y no limitativa, se representan los detalles más característicos...
Reivindicaciones:
1. SISTEMA AUTOMÍTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO A UN SUSTRATO MÓVIL, siendo del tipo de sistemas en los que el sustrato móvil sobre el que se va a imprimir avanza, posicionado por medio de los correspondientes posicionadores, sobre una cinta transportadora hacia los medios de impresión, caracterizado porque el sistema comprende:
• una primera cámara (1) que captura la posición de un sustrato móvil (2) a imprimir, carente de elementos posicionadores, sobre una cinta transportadora (3) y analiza los datos capturados;
• una unidad de control (4) a la que la primera cámara (1) transfiere los datos analizados, posición y ángulo, y en base a los cuales, mediante la implementación de un algoritmo, transforma la imagen contenida en su memoria para ajustarla a la posición del sustrato y proceder a su impresión, y;
• una FPGA (Field Programmable Gate Array) , en la unidad de control (4) .
2ª. SISTEMA AUTOMÍTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO A UN SUSTRATO MÓVIL, según reivindicación 1ª, caracterizado porque la primera cámara (1) incorpora un medio detector, en sentido transversal a la cinta transportadora (3) , del sustrato móvil (2) para la activación del disparo de captura.
3. SISTEMA AUTOMÍTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO A UN SUSTRATO MÓVIL, según reivindicaciones 1ª y 2ª, caracterizado porque la primera cámara (1) de captura de la posición del sustrato móvil (2) calcula la posición X0 e Y0 del punto del sustrato móvil (2) que provoca la activación del disparo y su ángulo "a" respecto a la dirección de impresión.
4. SISTEMA AUTOMÍTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO A UN SUSTRATO MÓVIL, según reivindicación 1ª, caracterizado porque el sistema incorpora, tras la zona de impresión, unos medios de verificación de la impresión, cuyos medios se definen por una segunda cámara (5) que captura la imagen (6) de la impresión para su procesado, según un proceso inverso al citado, y su comparación con la imagen de referencia guardada en la memoria de datos de la unidad de control (4) .
5. SISTEMA AUTOMÍTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO A UN SUSTRATO MÓVIL, según reivindicaciones 1ª y 4ª, caracterizado porque la imagen capturada por la segunda cámara (5) tras la zona de impresión es procesada mediante una operación de multiplicación lógica, superponiendo la imagen capturada con la imagen original guardada en la memoria de datos d ela unidad de control (4) , y en función del grado de correlación entre ambas acepta o rechaza la imagen impresa.
6. SISTEMA AUTOMÍTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO A UN SUSTRATO MOVIL, según reivindicación 1ª, caracterizado porque el sistema comprende:
• una primera cámara (1) que captura la posición y forma de un sustrato móvil (2) a imprimir, carente de elementos posicionadores, sobre una cinta transportadora (3) y analiza los datos capturados;
• una unidad de control (4) a la que la primera cámara (1) transfiere los datos analizados, posición y ángulo, y en base a los cuales, mediante la implementación de un algoritmo, transforma la imagen contenida en su memoria para ajustarla a la posición del sustrato y proceder a su impresión;
• una FPGA (Field Programmable Gate Array) , y;
• una serie de formas u otras características grabadas en la memoria de datos de la unidad de control (4) .
7. SISTEMA AUTOMÍTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO DE A UN SUSTRATO MOVIL, según reivindicación 6ª, caracterizado porque la forma u otra característica capturada por la primera cámara (1) y enviada a la unidad de control (4) es comparada con una serie de formas u otras características de referencia grabadas en la memoria de datos de dicha unidad de control (4) , pasando a formar parte de la imagen de referencia la imagen seleccionada.
8. SISTEMA AUTOMÍTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO A UN SUSTRATO MOVIL, según reivindicación 1ª, caracterizado porque el algoritmo para la transformación de la imagen se basa en un barrido de la imagen inicial con un enrejado sobremuestreado, cuya imagen inicial es dividida en subimagenes que son descargadas en la memoria interna de la FPGA y de forma directa ser rotadas.
9. SISTEMA AUTOMÍTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO A UN SUSTRATO MOVIL, según reivindicación 1ª y 8ª, caracterizado porque para la generación de la subimagen final, subimagen rotada, se identifica, mediante su coordenada, sus pixeles asociados mediante el giro de las coordenadas de la subimagen inicial almacenada en la FPGA de forma sobremuestreada.
10. SISTEMA AUTOMÍTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO A UN SUSTRATO MOVIL, según reivindicación 1ª, 8ª y 9ª, caracterizado porque, dado que las coordenadas de la 5 imagen final, normalmente no son enteras, se selecciona la pareja de coordenadas más próximas y se calcula el valor del pixel, mediante la búsqueda de los pixeles de la subimagen original almacenada en la FPGA.
11. SISTEMA AUTOMÍTICO DE ALINEACIÓN DE IMPRESIÓN INKJET INDUSTRIAL RESPECTO A UN SUSTRATO MOVIL, según reivindicación 1ª, 8ª, 9ª y 10ª caracterizado porque, dado que al realizar las búsqueda en la imagen inicial las coordenada no son enteras, es necesaria una interpolación mediante los valores de los píxeles vecinos más próximos, cuya contribución individual a la interpolación se realizará en paralelo mediante el almacenamiento en diferentes bancos de memoria en la FPGA de versiones submuestreadas de la subimagen inicial asociadas a la posición dentro de la ventana de interpolación.
Patentes similares o relacionadas:
Procedimiento para producir un conductor de polímero conductor, del 24 de Junio de 2020, de AI Silk Corporation: Un procedimiento de producción de un conductor de polímero conductor en el que un polímero conductor se adhiere a un material base (M), que comprende: un paso […]
Máquina para imprimir imágenes sobre artículos por medio de un rodillo de transferencia térmica, del 3 de Junio de 2020, de EIDOS S.R.L.: Máquina de impresión para imprimir imágenes sobre artículos (A), que comprende una estructura de soporte, estacionaria en funcionamiento, […]
Aparato de impresión de latas, del 29 de Abril de 2020, de I. Mer Co., Ltd: Aparato de impresión de latas que comprende: una impresora principal que tiene múltiples cilindros de placa para la impresión de diferentes colores y la […]
TINTA DE INYECCIÓN DE TINTA PARA SUSTRATO CERÁMICO, del 1 de Abril de 2020, de NORITAKE CO., LIMITED: Tinta de inyección de tinta para sustrato cerámico. La presente invención proporciona una tinta de inyección de tinta para un sustrato cerámico, […]
Impresora de chorro de tinta con dispositivo para la limpieza del cabezal de impresión, del 3 de Febrero de 2020, de SPGPrints B.V: 1. Una impresora de chorro de tinta para imprimir con tinta en un sustrato, que comprende: por lo menos un cabezal de impresión de chorro de tinta para inyección […]
Procedimiento y dispositivo para prever un sustrato con una impresión y un revestimiento de transferencia, del 8 de Enero de 2020, de LEONHARD KURZ STIFTUNG & CO. KG: Procedimiento para prever un sustrato (S) con una impresión, en el que la tinta de impresión líquida se imprime primero en una cinta (B) […]
Un método para producir una dispersión acuosa de negro de humo oxidado, del 25 de Diciembre de 2019, de Tokai Carbon Co., Ltd: Un método para producir una dispersión acuosa de negro de humo oxidado realizando sucesivamente sobre una suspensión acuosa de negro de humo oxidado […]
Composición de tinta transparente para impresión de chorro de tinta apta para curado por UV-LED, del 6 de Noviembre de 2019, de SAKATA INX CORPORATION: Una composición de tinta transparente apta para curado UV-LED para impresión por chorro de tinta que comprende de un 50 a un 80 % en masa […]