Procedimiento y sistema de superresolución de imágenes confocales adquiridas a través de una guía de imagen, y dispositivo utilizado para la puesta en ejecución de dicho procedimiento.
Procedimiento para aumentar la resolución de imágenes confocales adquiridas a través de una guía de imagenconstituido por varias fibras ópticas,
el extremo próximo de esta guía de imagen está conectada a un dispositivo debarrido láser previsto para emitir un haz láser en cada fibra óptica de la guía de imagen y recoger cada haz deretorno en el momento de una adquisición, el extremo distal está asociado a una cabeza óptica para enfocar el hazláser emitido por la guía de imagen en un objeto de observación, caracterizado porque, para una posicióndeterminada de la cabeza óptica, este procedimiento consta de las etapas de:
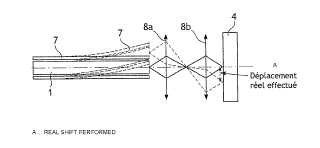
- Realización de varias adquisiciones a través de la guía de imagen, cada adquisición se realiza para una desviaciónespacial determinada de dicho extremo distal de la guía de imagen con respecto a la cabeza óptica,
- Transformación de los datos de cada adquisición en una nube de puntos ponderada por la potencia óptica medidasobre el objeto a través de cada fibra óptica de la guía de imagen,
- Registro de cada nube de puntos con respecto a una nube de puntos tomados como referencia,
- Superposición de las nubes de puntos así registrados, y
- Reconstrucción de una imagen final a partir de esta superposición
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2004/003401.
Solicitante: MAUNA KEA TECHNOLOGIES.
Nacionalidad solicitante: Francia.
Dirección: 9, RUE D'ENGHIEN 75010 PARIS FRANCIA.
Inventor/es: BERIER, FREDERIC, PERCHANT, AYMERIC.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T3/40 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 3/00 Transformación geométrica de la imagen en el plano de la imagen. › Cambio de escala de una imagen completa o de una parte de imagen.
- G06T5/50 G06T […] › G06T 5/00 Perfeccionamiento o restauración de imagen. › utilizando varias imágenes, p. ej. promedio, resta.
PDF original: ES-2383526_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema de superresolución de imágenes confocales adquiridas a través de una guía de imagen, y dispositivo utilizado para la puesta en ejecución de dicho procedimiento.
La invención presente se refiere a un procedimiento y un sistema de superresolución de imágenes confocales adquiridas a través de una guía de imagen, así como a un dispositivo utilizado la aplicación de dicho procedimiento.
Se trata de una aplicación particularmente interesante en el dominio de la imaginología médica. No obstante, la invención es de un campo más amplio ya que puede aplicarse a cualquier dominio en el cual se realiza la imaginología por medio de una guía compuesta de varias fibras ópticas, como por ejemplo en el ámbito de observación del interior de un dispositivo manufacturado.
La guía de imagen permite obtener una imagen. Dicho dispositivo permite desviar el barrido láser, la fuente de luz y el receptor lejos del objeto que hay que observar. Por ejemplo en un sistema de barrido láser con obtención de una imagen confocal, la guía de imagen es un conjunto de varios millares de fibras ópticas cuya disposición espacial es idéntica en la entrada y en la salida.
El extremo distal, es decir próximo al objeto que hay que observar y, por lo tanto, lejos de la fuente de luz, es asociado a un cabezal constituido por ópticas con el fin de enfocar el haz láser en el objeto que hay que observar. Dicha guía de imagen permite observar el objeto en profundidad, con una resolución lateral y un campo de observación que dependen del aumento de las ópticas, de la distancia entre los núcleos de la guía de imagen y del diámetro de la guía. Modificando el aumento, podemos hacer variar la resolución, en detrimento del campo. Del mismo modo, una guía de imagen similar, pero con una distancia entre los núcleos más pequeña permite obtener los mismos resultados. En ambos casos, cuando la resolución es más pequeña, el campo visual también disminuye.
Una guía de imagen es una estructura fija cuya relación entre la superficie útil y el número de núcleos presentes define la resolución del sistema. Para un mismo campo visual, y por tanto, una misma superficie de guía de imagen, la distancia entre los núcleos entre fibras no puede ser reducida debido a tensiones físicas y tecnológicas. En primer lugar, entran en juego las tensiones de fabricación. Y en segundo lugar, las tensiones físicas vinculadas a la diafonía de la guía y a las propiedades ópticas de las fibras que permiten guiar la luz alrededor de las longitudes de ondas visibles.
Así los límites físicos de guiado por paquete de fibras ópticas no permiten obtener una mejor resolución de aumento y de campo fijo.
En numerosas aplicaciones de la imaginología confocal fibrada, la búsqueda de una mejor resolución es primordial. En una aplicación médica por ejemplo, la visión de una célula o de los componentes de la célula requiere una resolución que puede ir más allá de los límites físicos de esta tecnología.
Existen numerosos trabajos de superresolución realizados a partir de una cámara clásica, donde el esquema de muestreo es regular y dispuesto en una rejilla cuadrada o rectangular. Estos trabajos utilizan masivamente la regularidad espacial del muestreo. Conocemos particularmente trabajos sobre la superresolución donde el muestreo producto de un conjunto de adquisiciones es un muestreo entrelazado. Por ejemplo, podemos citar las publicaciones siguientes:
H. Shekarforoush y R. Chellappa. "Data-driven multi-channel super - resolution with application to video sequences". Journal of the a Optical Society of America A, 16 (3) : 481 - 492, Mar. 1999.;
R Komprobst, R. Peeters, T. Vieville, G. Malandain, S.Mierisova, S. Sunaert, y 0. Faugerasand R. Van Hecke; "Superresolution in mri and its influye in statistical analysis"; Technical Report nO 4513, INRIA, Julio 2002; y [0011] S. Lertrattanapanich y N.K. Bose; "High resolution image formation from low resolution frames using delaunay triangulation"; IEEE Transactions on Images Processing, vol. 11 (nO 12) , Diciembre 2002.
Finalmente, conocemos trabajos que describen un sistema en el que el movimiento entre varias vistas es bastante libre y produce un muestreo realmente irregular. La función de transferencia del sistema descrito es espacialmente variante, y la relación entre la anchura de la función de transferencia y la distancia que separa los puntos de muestreo no es constante en la adquisición, lo que tiene como consecuencia tener en cuenta las ópticas del sistema, y por tanto, una resolución bastante compleja. Dicho sistema se divulga particularmente en los documentos siguientes:
A. Patti, M. Sezan, y M. Tekalp; "Superresolution video reconstruction with arbitrar y sampling lattices and nonzero aperture time"; IEEE Trans. on Image Processing, páginas 1064-1078, Agosto 1997; y [0014] Andrew J. Patti y Yucel Altunbasak; "Artifact reduction for set theoretic super resolution image reconstruction with edge adaptive constraints and higher-order interpolants"; IEEE Transactions on Image Processing, 10 (I) : 179186, Enero 2001.
Conocemos el documento US 6466 618 que describe un sistema para obtener una imagen de alta resolución a partir de varias imágenes de baja resolución. Cada imagen de baja resolución se obtiene por inserción de un filtro cromático sobre un captador CCD. Cada filtro consta de una red diferente de la red del captador CCD. El sistema descrito en este documento utiliza pequeños movimientos de los objetos visualizados.
También conocemos el documento US 4.618.884 que describe un dispositivo de adquisición de imagen mediante una guía de imagen. Se adquieren diferentes imágenes desplazando una plaqueta al extremo distal de la guía de imagen que queda fija.
La invención presente tiene por objeto aumentar la resolución de una imagen adquirida a través de una guía de imagen. Otro objetivo destacable de la invención es aplicar el concepto de superresolución a una guía de imagen.
Además, la invención tiene por objeto mejorar la resolución de una imagen a campo constante adquirida a través de una guía de imagen aumentando el número de puntos de medida por unidad de superficie.
Alcanzamos por lo menos uno de los objetivos anteriormente mencionados con un procedimiento para aumentar la resolución de imágenes confocales adquiridas a través de una guía de imagen constituida por varias fibras ópticas, el extremo próximo de esta guía de imagen que está conectado a un dispositivo de barrido láser previsto para emitir un haz láser en cada fibra óptica de la guía de imagen y recoger cada haz de retorno en el momento de una adquisición, y el extremo distal está asociado a una cabeza óptica para enfocar el haz láser emitido por la guía de imagen en un objeto de observación. Según la invención, para una posición determinada de la cabeza óptica, este procedimiento consta de las siguientes etapas:
- Realización de varias adquisiciones a través de la guía de imagen, cada adquisición se realiza para una desviación espacial determinada de dicho extremo distal de la guía de imagen con respecto a la cabeza óptica, -Transformación de los datos de cada adquisición en una nube de puntos ponderada por la potencia óptica medida sobre el objeto a través de cada fibra óptica de la guía de imagen,
- Registro de cada nube de puntos con respecto a una nube de puntos tomados como referencia,
- Superposición de las nubes de puntos así registrados, y
- Reconstrucción de una imagen final a partir de esta superposición.
Con el procedimiento según la invención, realizamos una adquisición redundante de un mismo objeto antes de una etapa de reconstrucción de la imagen final. Para una posición determinada de la cabeza óptica, realizamos varias adquisiciones, cada adquisición corresponde a una posición determinada de la guía de imagen.
Para el resto de la descripción, la etapa de registro de nube de puntos es un abuso de lenguaje lo cual significa, de hecho, que trata cada nube de puntos para registrar las imágenes que corresponden a estas nubes de puntos, sin reconstruir forzosamente estas imágenes.
En particular, una sola adquisición a través de la guía de imagen es equivalente a una adquisición sobre una rejilla irregular (que es el emplazamiento de las fibras) , llamado más adelante muestreo del objeto. El desplazamiento de la guía de imagen en el tubo vuelve a desplazar el esquema... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para aumentar la resolución de imágenes confocales adquiridas a través de una guía de imagen constituido por varias fibras ópticas, el extremo próximo de esta guía de imagen está conectada a un dispositivo de barrido láser previsto para emitir un haz láser en cada fibra óptica de la guía de imagen y recoger cada haz de retorno en el momento de una adquisición, el extremo distal está asociado a una cabeza óptica para enfocar el haz láser emitido por la guía de imagen en un objeto de observación, caracterizado porque, para una posición determinada de la cabeza óptica, este procedimiento consta de las etapas de:
- Realización de varias adquisiciones a través de la guía de imagen, cada adquisición se realiza para una desviación espacial determinada de dicho extremo distal de la guía de imagen con respecto a la cabeza óptica,
- Transformación de los datos de cada adquisición en una nube de puntos ponderada por la potencia óptica medida sobre el objeto a través de cada fibra óptica de la guía de imagen,
- Registro de cada nube de puntos con respecto a una nube de puntos tomados como referencia,
- Superposición de las nubes de puntos así registrados, y
- Reconstrucción de una imagen final a partir de esta superposición.
2. Procedimiento según la reivindicación 1, caracterizado porque la etapa de la transformación de los datos adquiridos va seguida de la aplicación de un filtro para eliminar artefactos debidos a la presencia de la guía de imagen.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque la etapa de registro consta de las siguientes etapas:
- Corrección de las distorsiones geométricas,
- Reconstrucción de una imagen de referencia designada como imagen fija, por interpolación de una nube de puntos de referencia llamada nube de puntos fija,
- Para cada una de las demás nubes de puntos, designada como nube de puntos móvil, reconstrucción de una imagen llamada móvil, y optimización de un error cuadrático medio calculado entre dicha imagen móvil y dicha imagen fija.
4. Procedimiento según la reivindicación 3, caracterizado porque se calcula el error cuadrático medio considerando sólo los pixeles que corresponden a los puntos de dichas nubes de puntos móviles.
5. Procedimiento según la reivindicación 3 ó 4, caracterizado porque la interpolación consiste en un algoritmo llamado de aproximación B-splines iterativo.
6. Procedimiento según cualquiera de las reivindicaciones 3 a 5, caracterizado porque la nube de puntos fija corresponde a una posición de la guía de imagen en reposo.
7. Procedimiento según la reivindicación 1 ó 2, caracterizado porque la etapa de registro consiste en registrar las nubes de puntos en función de las distancias de desviación predeterminadas obtenidas por una etapa de calibrado de los desplazamientos de la guía de imagen.
8. Procedimiento según cualquiera de las reivindicaciones precedentes, caracterizado porque en cada adquisición, para desviar la guía de imagen con respecto a la cabeza óptica, aplicamos al menos una tensión por lo menos sobre una banda piezoeléctrica, que es solidaria por lo menos del extremo distal de esta guía de imagen.
9. Procedimiento según las reivindicaciones 7 y 8, caracterizado porque se realiza la etapa de calibrado aplicando las etapas siguientes sobre un número limitado de nubes de puntos obtenidas por adquisición de un objetivo de referencia dispuesto en lugar de dicho objeto de observación:
- Corrección de las distorsiones geométricas,
- Reconstrucción de una imagen de referencia designada como imagen fija por interpolación de una nube de puntos de referencia llamada nube de puntos fija,
- Para cada otra una de las demás nubes de puntos, designada como nube de puntos móvil, reconstrucción de una imagen llamada móvil, y optimización de un error cuadrático medio calculado entre dicha imagen móvil y dicha imagen fija,
- Elaboración de un modelo lineal que describe la distancia de desviación obtenida entre la imagen fija y la imagen móvil en función de la tensión aplicada sobre la banda piezoeléctrica para realizar esta desviación.
10. Procedimiento según la reivindicación 8 ó 9, caracterizado porque se utilizan cuatro bandas que constituyen un tubo piezoeléctrico que rodea por lo menos el extremo distal de la guía de imagen, y porque se aplican, para cada desplazamiento del extremo distal de la guía de imagen, un par de tensiones opuestas sobre respectivamente las dos bandas opuestas.
11. Procedimiento según cualquiera de las reivindicaciones precedentes, caracterizado porque la desviación espacial se consigue por un movimiento sensiblemente de traslación lateral del extremo distal de la guía de imagen según dos direcciones ortogonales.
12. Procedimiento según cualquiera de las reivindicaciones precedentes, caracterizado porque se realiza la etapa de reconstrucción de la imagen final por medio de un algoritmo llamado de aproximación B-splines iterativo para el cual la superposición está considerada como una nube de puntos irregulares.
13. Procedimiento según cualquiera de las reivindicaciones precedentes, caracterizado porque la etapa de reconstrucción de la imagen final va seguida de una etapa de deconvolución de la imagen final.
14. Dispositivo para aumentar la resolución de imágenes confocales adquiridas a través de una guía de imagen constituido por varias fibras ópticas, el extremo próximo de esta guía de imagen está conectado a un dispositivo de barrido láser previsto para emitir un haz láser en cada fibra óptica de la guía de imagen y recoger cada haz de retorno en el momento de una adquisición, el extremo distal está asociado a una cabeza óptica para enfocar el haz láser emitido por la guía de imagen en un objeto de observación, caracterizado porque la cabeza óptica consta de medios ópticos solidarios de esta cabeza óptica, y porque el dispositivo consta además de un tubo piezoeléctrico que rodea la guía de imagen y es solidario de esta guía de imagen, por lo menos a dicho extremo distal, para desviar espacialmente este extremo distal con respecto a la cabeza óptica en respuesta a una señal de desviación.
15. Dispositivo según la reivindicación 14, caracterizado porque el tubo piezoeléctrico está constituido por lo menos por cuatro bandas cerámicas independientes que ocupan cada una, un cuarto del tubo.
16. Dispositivo según la reivindicación 15, caracterizado porque las caras interna y externa de cada banda están recubiertas de material metálico, como plata, de modo que la aplicación de tensiones opuestas sobre dos bandas opuestas respectivamente, desplaza el extremo distal del tubo utilizando el efecto piezoeléctrico transversal.
17. Dispositivo según la reivindicación 15 ó 16, caracterizado porque las bandas cerámicas se dirigen de dos en dos, en ambas direcciones ortogonales.
18. Sistema que ejecuta el procedimiento según cualquiera de las reivindicaciones 1 a 13, para aumentar la resolución de imágenes confocales adquiridas a través de una guía de imagen constituido por varias fibras ópticas, el extremo próximo de esta guía de imagen está conectado a un dispositivo de barrido láser previsto para emitir un haz láser en cada fibra óptica de la guía de imagen y recoger cada haz de retorno en el momento de una adquisición, el extremo distal está asociado con una cabeza óptica para enfocar el haz láser emitido por la guía de imagen en un objeto de observación, caracterizado porque, para una posición determinada de la cabeza óptica, este sistema consta de:
- Medios para realizar varias adquisiciones a través de la guía de imagen,
- Medios para desviar espacialmente, en cada adquisición, dicho extremo distal de la guía de imagen con respecto a la cabeza óptica,
- Medios para transformar datos de cada adquisición en una nube de puntos ponderada por la potencia óptica medida sobre el objeto a través de cada fibra óptica de la guía de imagen,
- Medios para registrar cada nube de puntos,
- Medios para superponer las nubes de puntos así registradas, y medios para reconstruir una imagen final a partir de esta superposición.
Patentes similares o relacionadas:
Método y dispositivo de procesamiento de imágenes, medio de almacenamiento legible por computadora y dispositivo electrónico, del 26 de Febrero de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un método de procesamiento de imágenes implementado por computadora, que comprende: seleccionar una imagen de referencia de entre una pluralidad […]
Procedimiento y aparato de procesamiento de imágenes y dispositivo electrónico, del 1 de Enero de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de procesamiento de imágenes para un dispositivo electrónico, en el que el dispositivo electrónico comprende un aparato […]
Procesamiento de imágenes, del 1 de Enero de 2020, de MBDA UK LIMITED: Un método de procesamiento de imágenes que comprende las etapas de: (i) proporcionar una pila para almacenar un número predeterminado de porciones de cuadro; (ii) […]
Sensor de movimiento y sensor de imágenes, del 20 de Noviembre de 2019, de THALES: Sensor (CM) de movimiento destinado a ser embarcado en un portador que se desplaza por encima de una escena y destinado a ser sometido a vibraciones […]
Procesamiento, aparato y dispositivo electrónico de procesamiento de imágenes, del 23 de Octubre de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de procesamiento de imagen para un dispositivo electrónico, en el que el dispositivo electrónico comprende un aparato de procesamiento […]
Procedimiento de control, dispositivo de control y dispositivo electrónico, del 28 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de control, configurado para controlar un dispositivo electrónico, en el que el dispositivo electrónico comprende un dispositivo de […]
Método y aparato de procesamiento de imagen y dispositivo electrónico, del 5 de Junio de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un método de procesamiento de imagen, para un dispositivo electrónico que incluye un aparato de formación de imágenes con un sensor de imagen, el sensor de imagen […]
Sistema de procesado de fusión de imágenes de luz visible e imágenes de infrarrojos y método de fusión, del 5 de Junio de 2019, de Wuhan Guide Infrared Co., Ltd: Sistema de procesado de fusión de imágenes de luz visible e imágenes de infrarrojos, que comprende un módulo de adquisición de imágenes, un módulo de fusión de imágenes y […]