Método y aparato para cambiar la resolución espacial de una imagen digital.
Un método para cambiar la resolución espacial de una primera imagen (102) digital que tiene una primera resolución espacial para proporcionar una segunda imagen (105) digital que tiene una segunda resolución espacial,
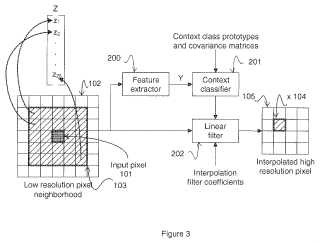
que es diferente de la primera resolución espacial, comprendiendo el método, para cada uno de entre una pluralidad de píxeles en la primera imagen digital: obtener un vector (Y) de características para un píxel (101) en la primera imagen (102) digital; clasificar dicho píxel (101) de manera que dicho píxel es asignado a una o más clases de contexto, comparando el vector (Y) de características de dicho píxel con un prototipo de cada una de dichas clases de contexto, teniendo cada una de dichas clases de contexto uno o más filtros (202) de interpolación asociados a la misma; y filtrar dicho píxel (101) usando el uno o más filtros (202) de interpolación asociados con la una o más clases de contexto a las cuales está asignado dicho píxel, generando, de esta manera, uno o más píxeles (104) de la segunda imagen (105) digital; en el que dicho vector (Y) de características para dicho píxel (101) es una función de las diferencias entre pares contiguos seleccionados de píxeles en la primera imagen (102) digital, caracterizado porque al menos uno de dichos pares contiguos de píxeles en la primera imagen (102) digital no incluye dicho píxel (101).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08100059.
Solicitante: VESTEL ELEKTRONIK SANAYI VE TICARET A.S.
Nacionalidad solicitante: Turquía.
Dirección: ORGANIZE SANAYI BÖLGESI 45030 MANISA TURQUIA.
Inventor/es: ALTUNBASAK,YUCEL, AKGUN,TOYGAR, Sezer,Osman Gokhan.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T3/40 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 3/00 Transformación geométrica de la imagen en el plano de la imagen. › Cambio de escala de una imagen completa o de una parte de imagen.
PDF original: ES-2382832_T3.pdf
Fragmento de la descripción:
Método y aparato para cambiar la resolución espacial de una imagen digital.
La presente invención se refiere a un método y a un aparato para cambiar la resolución espacial de una imagen digital.
La presente invención se refiere, en general, al escalado y a la mejora de la resolución de una imagen digital. Las realizaciones preferentes permiten que las imágenes digitales sean escaladas con una cantidad mínima de borrosidad y bordes puntiagudos. Las técnicas pueden ser incluidas en cualquier sistema que necesite cambiar el tamaño de una imagen digital de entrada o una secuencia de imágenes digitales. Una aplicación práctica son los aparatos de televisión digital en los que una imagen de entrada debe ser visualizada a un tamaño diferente (normalmente, un tamaño mayor) de su tamaño original, sin perder detalles espaciales y sin introducir bordes puntiagudos. Otras aplicaciones incluyen impresoras en las que se requiere cambiar el tamaño de una imagen de entrada para imprimirla en un tamaño deseado (normalmente mayor) , en las cámaras digitales, para permitir que una imagen capturada sea visualizada a una resolución diferente (normalmente mayor) y, en general, en el procesamiento digital de imágenes, tal como en imágenes médicas, para aumentar la resolución de la imagen, etc.
Se conocen diversas técnicas de escalado de imagen en la técnica anterior. Muchas de estas técnicas son del tipo denominado interpolador de B-spline. Los más simples de los interpoladores B-spline son los de orden cero y primero. Estos se conocen, respectivamente, como replicación de píxel e interpolación bilineal. En la replicación de píxeles, cada píxel en la imagen de salida de alta resolución se obtiene tomando el valor del píxel más cercano en la imagen de entrada de baja resolución. En la interpolación bilineal, cada píxel en la imagen de salida de alta resolución se obtiene calculando una combinación lineal de hasta cuatro píxeles en la imagen de entrada de baja resolución. Los interpoladores de orden más alto usan técnicas más sofisticadas, pero son computacionalmente intensivos.
Un enfoque diferente, basado en la clasificación, se divulga en la "Optimal Image Scaling Using Pixel Classification" por C.B. Atkins, C.A. Bouman y J.P. Allebach, en Proceedings of the 2001 International Conference on Image processing, 710 de octubre de 2001, volumen 3, página (s) : 864 - 867 y, con más detalle, en la tesis doctoral de C.B. Atkins, titulada "Classification-base Methos in Optimal Image Interpolation". Las Figuras 1 y 2 muestran esquemáticamente la técnica divulgada por Atkins y col.
Haciendo referencia, en primer lugar, a la Figura 1, para cada píxel 1 de entrada en la imagen 2 de entrada de baja resolución, en este ejemplo una ventana 3 de 5x5 de píxeles en la imagen 2 de entrada, de baja resolución, está centrada en el píxel 1 de entrada. Esta ventana 5x5 es vectorizada en columnas en un vector Z de columna 25x1 (denominado vector Z de observación en los documentos Atkins) . A continuación, en un bloque 11 extractor de características, se aplica un operador f de proyección de transformación no-lineal al vector Z de observación, para obtener un vector de agrupación o vector Y de características, es decir, Y = f (Z) para cada píxel 1 de entrada. En términos generales, Y es de menor dimensión que Z. Esta asignación desde el vector Z de observación al vector Y de características afecta a la calidad de la imagen final, de alta resolución, interpolada. Son posibles un número de operadores de proyección f diferentes.
A continuación, el vector Y de características para cada píxel 1 de entrada es pasado a un bloque 12 clasificador en el que el vector Y de características para cada píxel 1 de entrada en la imagen 2 de entrada de baja resolución está asociado con (o "clasificado" o "agrupado a") un número limitado de clases de contexto. Estas clases de contexto modelan diferentes tipos de regiones de imagen en la imagen 2 de entrada, tales como bordes, regiones suaves, regiones texturadas, etc. Para este propósito, los parámetros 8 de distribuci ón son suministrados al bloque 12 clasificador, y el grado de asociación del vector Y de características con las clases individuales se determina, entre otras cosas, según los parámetros 8 de distribución. Atkins et al proponen un marco estadístico para atribuir el píxel 1 de entrada a las clases de contexto. La clasificación de contexto es realizada comparando la distancia del vector de características del píxel de entrada de baja resolución a los prototipos de las clases de contexto. (El "prototipo" de una clase de contexto es el punto o vector en la clase de contexto que mejor representa a los miembros de esa clase de contexto) . Para cada píxel 1 de entrada, el bloque 12 clasificador calcula y pone en su salida un número entre 0 y 1 para cada una de las clases de contexto, siendo estos números coeficientes de ponderación y siendo su suma igual a 1. Los coeficientes de ponderación asignados a cada clase por el bloque 12 clasificador son las probabilidades de que el píxel 1 de entrada pertenezca a las clases respectivas, es decir, wi es la probabilidad de que el píxel 1 de entrada pertenezca a la clase i. Los parámetros 8 de distribución se obtienen durante un procedimiento de entrenamiento, que será explicado más adelante.
Una vez que el vector Y de características para cada píxel 1 de entrada ha sido asociado con las clases de contexto, un bloque 13 de filtro lineal es usado para obtener los píxeles 5 de salida de la imagen 6 de salida de alta resolución. En particular, para cada píxel 1 de entrada de la imagen 2 de entrada de baja resolución, una ventana 3 de píxeles de 5x5, centrada en el píxel 1 de entrada, es pasada al bloque 13 de filtro lineal. El bloque 13 de filtro lineal toma como una entrada los coeficientes de ponderación de las clases de contexto, calculados por el bloque 12 clasificador para el píxel 1 de entrada particular y toma como otra entrada los coeficientes L de filtro de interpolaci ón, que corresponden a las clases contexto respectivas, y calcula un bloque LxL de píxeles 5 de salida para la imagen 6 de salida de alta resolución, mediante una combinación lineal de las salidas de los filtros de interpolación en proporciones según los coeficientes de ponderación calculados por el bloque 12 clasificador para el píxel 1 de entrada particular. (L es el factor de escala. En el ejemplo mostrado en la Figura 1, L = 2) Si esta ventana LxL de píxeles de alta resolución es barrida por rastreo en un vector X, entonces la interpolación se puede ser expresada como en la que Ai y ºi son la matriz de interpolación y el vector de desviación de la i-ésima clase de contexto, wi son los coeficientes de ponderación para los filtros/las clases de contexto respectivos, y M es el número de filtros/clases de contexto. Ai y ºi, conjuntamente, son los coeficientes del filtro de interpolación. Esta fórmula muestra que el valor final de un píxel de alta resolución, interpolado, se obtiene como una combinación lineal ponderada de los valores de interpolación calculados usando los coeficientes del filtro de interpolación de todas las clases de contexto. Los coeficientes de ponderación de la combinación se calculan usando los parámetros obtenidos durante el entrenamiento fuera de línea, expuesto más adelante. El coeficiente ponderación de una clase de contexto aumenta a medida que el vector característica del píxel de entrada de baja resolución se acerca al prototipo. El coeficiente de ponderación de una clase de contexto se incrementa conforme el vector de características del píxel de entrada de baja resolución se acerca al prototipo.
En resumen, en esta técnica anterior, los píxeles 1 de entrada son "clasificados" o asociados a cada una de las clases de contexto de la imagen, en diferentes grados o "coeficientes de ponderación". La ventana X de píxeles 5 de salida interpolados se obtiene filtrando, en primer lugar, el vector Z de observación con los coeficientes L óptimos del filtro de interpolación para las clases individuales y, a continuación, combinando los resultados en una mezcla de proporciones, tal como se determinan en la fase de clasificación. Los coeficientes L del filtro de interpolaci ón, introducidos al bloque 13 de filtro lineal, corresponden a la matriz A de interpolación y al vector º de desviaci ón y son obtenidos, de nuevo, durante
un procedimiento de entrenamiento, que se describirá más adelante.
Evidentemente, de importancia clave en esta técnica son los parámetros 8 de distribuci ón, relacionados con la distribución de los píxeles... [Seguir leyendo]
Reivindicaciones:
1. Un método para cambiar la resolución espacial de una primera imagen (102) digital que tiene una primera resolución espacial para proporcionar una segunda imagen (105) digital que tiene una segunda resolución espacial, que es diferente de la primera resolución espacial, comprendiendo el método, para cada uno de entre una pluralidad de píxeles en la primera imagen digital:
obtener un vector (Y) de características para un píxel (101) en la primera imagen (102) digital; clasificar dicho píxel (101) de manera que dicho píxel es asignado a una o más clases de contexto, comparando el vector (Y) de características de dicho píxel con un prototipo de cada una de dichas clases de contexto, teniendo cada una de dichas clases de contexto uno o más filtros (202) de interpolación asociados a la misma; y filtrar dicho píxel (101) usando el uno o más filtros (202) de interpolación asociados con la una o más clases de contexto a las cuales está asignado dicho píxel, generando, de esta manera, uno o más píxeles (104) de la segunda imagen (105) digital; en el que dicho vector (Y) de características para dicho píxel (101) es una función de las diferencias entre pares contiguos seleccionados de píxeles en la primera imagen (102) digital, caracterizado porque al menos uno de dichos pares contiguos de píxeles en la primera imagen (102) digital no incluye dicho píxel (101) .
2. Un método según la reivindicación 1, en el que el vector (Y) de características es una función sólo de las diferencias entre pares contiguos seleccionados de píxeles en la primera imagen (102) digital, en el que al menos uno de entre los pares contiguos de píxeles en la primera imagen (102) digital no incluye dicho píxel (101) .
3. Un método según la reivindicación 1 o la reivindicación 2, en el que dichos pares de píxeles son píxeles en una ventana (103) de tamaño predeterminado alrededor de dicho píxel (101) .
4. Un método según cualquiera de las reivindicaciones 1 a 3, en el que dicha función es tal que cada una de las diferencias entre los pares contiguos seleccionados de píxeles en la primera imagen (102) digital es elevada a una potencia n, donde n es un número par.
5. Un método según cualquiera de las reivindicaciones 1 a 4, en el que cada elemento de cada vector (Y) de características es una función de la diferencia entre un par contiguo seleccionado de píxeles en la primera imagen
(102) digital, siendo obtenido cada vector de características normalizando los elementos de dicho vector de características, obtenidos de esta manera.
6. Un método según cualquiera de las reivindicaciones 1 a 5, en el que al menos uno de los elementos de cada vector (Y) de característica es una función de la diferencia entre pares de píxeles en filas contiguas de la primera imagen (102) digital.
7. Un método según cualquiera de las reivindicaciones 1 a 6, en el que la primera imagen (102) digital está en un formato que tiene al menos un componente de luminancia y dos componentes de crominancia, en el que:
dichas diferencias entre al menos algunos de los pares contiguos de píxeles son las diferencias en los valores respectivos de los componentes de luminancia de dichos pares contiguos de píxeles.
8. Un método según la reivindicación 7, en el que la primera imagen (102) digital está inicialmente en formato RGB y es convertido en dicho formato, que tiene al menos un componente de luminancia y dos componentes de crominancia, en el que se identifican aquellas combinaciones de componentes RGB para las que pueden ocurrir bordes con isoluminancia cuando la imagen en formato RGB es convertida a dicho formato que tiene al menos un componente de luminancia y dos componentes de crominancia, en el que:
para al menos algunos píxeles de la primera imagen (102) digital, que inicialmente tiene valores RGB correspondientes a aquellas combinaciones de los componentes RGB para las que pueden ocurrir bordes con isoluminancia cuando la imagen formato RGB es convertida a dicho formato, que tiene al menos un componente de luminancia y dos componentes de crominancia, dichas diferencias entre al menos algunos de los pares contiguos de dichos píxeles son las diferencias en los valores respectivos de al menos uno de las componentes de crominancia de dichos pares contiguos de píxeles.
9. Un método según cualquiera de las reivindicaciones 1 a 8, en el que:
la clasificación de dicho píxel (101) es tal que dicho píxel es asignado a una única clase de contexto, comparando el vector (Y) de características de dicho píxel con un prototipo de cada una de dichas clases de contexto; y el filtrado de dicho píxel usa un único filtro (202) de interpolación que está asociado con dicha única clase de contexto a la que está asignado dicho píxel.
10. Un método según la reivindicación 9, en el que la segunda resolución es mayor que la primera resolución y la relación de la primera resolución a la segunda resolución no es un número entero, siendo obtenidos los píxeles (104) en la segunda imagen digital, para cada uno de dichos píxeles en la segunda imagen (105) digital:
identificando la ubicación en la primera imagen digital que corresponde a la ubicación de dicho píxel en la segunda imagen (104) digital; identificando el píxel en la primera imagen (102) digital que corresponde a dicha ubicación en la primera imagen (102) digital; y filtrando dicho píxel en la primera imagen digital con el único filtro (202) de interpolación respectivo que corresponde a dicha ubicación en la primera imagen (102) digital, obteniendo, de esta manera, los píxeles en la segunda imagen (104) digital.
11. Un método según cualquiera de las reivindicaciones 1 a 10, en el que los valores de los elementos de un vector
(Y) de características para dicho píxel se obtienen desde una tabla de consulta.
12. Aparato para cambiar la resolución espacial de una primera imagen (102) digital, que tiene una primera resolución espacial, para proporcionar una segunda imagen (105) digital, que tiene una segunda resolución espacial, que es diferente de la primera resolución espacial, comprendiendo el aparato:
un extractor (200) de vectores de características para obtener un vector (Y) de características para un píxel
(101) en la primera imagen (102) digital; un clasificador (201) para clasificar dicho píxel (101) de manera que dicho píxel es asignado a una o más clases de contexto, comparando el vector (Y) de características de dicho píxel con un prototipo de cada una de dichas clases de contexto, teniendo cada una de dichas clases de contexto uno o más filtros de interpolación asociados a la misma; y, un filtro (202) para filtrar dicho píxel usando el uno o más filtros (202) de interpolación asociados con la una o más clases de contexto a las que está asignado dicho píxel, para generar, de esta manera, uno o más píxeles
(101) de la segunda imagen (105) digital; en el que el extractor (200) de vectores de características está dispuesto de manera que dicho vector (Y) de características para dicho píxel (101) es una función de las diferencias entre pares contiguos seleccionados de píxeles en la primera imagen (102) digital, caracterizado porque al menos uno de dichos pares contiguos de píxeles en la primera imagen (102) digital no incluye dicho píxel (101) .
13. Aparato según la reivindicación 12, en el que el extractor (200) de vectores de características está dispuesto de manera que el vector (Y) de características es una función sólo de las diferencias entre pares contiguos seleccionados de píxeles en la primera imagen (102) digital, en el que al menos uno de dichos pares de píxeles en la primera imagen digital no incluye dicho píxel (101) .
14. Aparato según la reivindicación 12 o la reivindicación 13, en el que el extractor (200) de vectores de características está dispuesto de manera que dichos pares de píxeles son píxeles en una ventana (103) de tamaño predeterminado alrededor de dicho píxel.
15. Aparato según cualquiera de las reivindicaciones 12 a 14, en el que el extractor (200) de vectores de características está dispuesto de manera que dicha función es tal que cada una de las diferencias entre pares contiguos seleccionados de píxeles en la primera imagen (102) digital es elevada a una potencia n, donde n es un número par.
16. Aparato según cualquiera de las reivindicaciones 12 a 15, en el que el extractor (200) de vectores de características está dispuesto de manera que cada elemento de cada vector (Y) de características es una función de la diferencia entre un par contiguo seleccionado de píxeles en la primera imagen (102) digital y cada vector (Y) de características es obtenido normalizando los elementos de dicho vector de características, obtenido de esta manera.
17. Aparato según cualquiera de las reivindicaciones 12 a 16, en el que el extractor (200) de vectores de características está dispuesto de manera que al menos uno de los elementos de cada vector (Y) de características
es una función de la diferencia entre pares de píxeles en filas contiguas de la primera imagen (102) digital.
18. Aparato según cualquiera de las reivindicaciones 12 a 17, en el que el aparato está dispuesto para operar sobre una primera imagen (102) digital que está en un formato que tiene al menos un componente de luminancia y dos componentes de crominancia, estando dispuesto el extractor (200) de vectores de características de manera que dichas diferencias entre al menos algunos de los pares contiguos de píxeles son las diferencias en los valores respectivos de las componentes de luminancia de dichos pares contiguos de píxeles.
19. Aparato según la reivindicación 18, en el que el aparato está dispuesto para operar sobre una primera imagen
(102) digital que está inicialmente en formato RGB y es convertida a dicho formato que tiene al menos un componente de luminancia y dos componentes de crominancia, en el que se han identificado aquellas combinaciones de componentes RGB para las que pueden ocurrir bordes con isoluminancia cuando la imagen de formato RGB es convertida a dicho formato que tiene al menos un componente de luminancia y dos componentes de crominancia, en el que:
el extractor (200) de vectores de características está dispuesto de manera que, para al menos algunos píxeles en la primera imagen (102) digital, que inicialmente tiene valores RGB correspondientes a aquellas combinaciones de componentes RGB para las que pueden ocurrir bordes de isoluminancia cuando la imagen de formato RGB es convertida a dicho formato que tiene al menos un componente de luminancia y dos componentes de crominancia, dichas diferencias entre al menos algunos de los pares contiguos de dichos píxeles son las diferencias en los valores respectivos de al menos uno de los componentes de crominancia de dichos pares contiguos de píxeles.
20. Aparato según cualquiera de las reivindicaciones 12 a 19, en el que:
el clasificador (201) está dispuesto de manera que dicho píxel (101) es asignado a una única clase de contexto comparando el vector (Y) de características de dicho píxel (101) con un prototipo de cada una de dichas clases de contexto; y el filtro (202) está dispuesto para filtrar dicho píxel (101) usando un único filtro de interpolación que está asociado con dicha única clase de contexto a la que está asignado dicho píxel.
21. Aparato según la reivindicación 20, en el que la segunda resolución es mayor que la primera resolución y la relación de la primera resolución a la segunda resolución no es un entero, estando dispuesto el aparato para obtener los píxeles en la segunda imagen (105) digital, para cada uno de dichos píxeles en la segunda imagen digital:
identificando la ubicación en la primera imagen (102) digital que corresponde a la ubicación de dicho píxel en la segunda imagen digital; identificando el píxel en la primera imagen (102) digital que corresponde a dicha ubicación en la primera imagen digital; y, filtrando dicho píxel en la primera imagen (102) digital con el único filtro (202) de interpolación respectivo que corresponde a dicha ubicación en la primera imagen (102) digital, para obtener, de esta manera, los píxeles en la segunda imagen (104) digital.
22. Aparato según cualquiera de las reivindicaciones 12 a 21, que comprende una tabla de consulta que contiene los valores de los elementos de los vectores (Y) de características.
Patentes similares o relacionadas:
Dispositivo de conversión de imágenes, procedimiento y medio de registro legible por ordenador, del 15 de Julio de 2020, de RAKUTEN, INC: Un dispositivo de conversión de imágenes que comprende: una unidad de recepción que recibe una imagen G[0] de un producto capturado por un dispositivo […]
Captación de corredor, del 29 de Abril de 2020, de nearmap australia pty, ltd: Un método para crear un ortomosaico de un área de corredor que consiste en una faja de tierra o de agua a lo largo de una trayectoria arbitraria , área […]
Procesamiento de imágenes, del 22 de Abril de 2020, de MBDA UK LIMITED: Un método de procesamiento de imágenes que comprende las etapas de: (i) obtener una imagen que incluye un objeto objetivo, estando la imagen formada […]
Método de procesamiento de imágenes y dispositivo, del 8 de Abril de 2020, de Alibaba Group Holding Limited: Un método de procesamiento de imágenes, que comprende: adquirir una imagen original; en donde la imagen original comprende una imagen […]
Procedimiento de fotografía usando un dispositivo electrónico externo y dispositivo electrónico que soporta el mismo, del 1 de Abril de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un dispositivo electrónico que comprende: un circuito de comunicación; una memoria configurada para almacenar contenidos que incluyen una cuarta imagen en la que se […]
Procedimientos de dirección de línea de corte para formar una imagen de mosaico de un área geográfica, del 25 de Marzo de 2020, de PICTOMETRY INTERNATIONAL CORP.: Un procedimiento ejecutado en un sistema informático sin requerir intervención humana para dirigir automáticamente líneas de corte de mosaico a lo largo de rutas preferidas […]
Imágenes oblicuas en mosaico y métodos para elaborar y usar las mismas, del 26 de Febrero de 2020, de PICTOMETRY INTERNATIONAL CORP.: Un método para crear una imagen de mosaico oblicua a partir de una pluralidad de imágenes oblicuas de la fuente tomadas a una primera elevación por […]
Método y dispositivo de combinación de imágenes, del 8 de Enero de 2020, de CYCLOMEDIA TECHNOLOGY B.V.: Un método para combinar una pluralidad de sub imágenes alineadas globalmente en una región a combinar, el método comprende: encontrar un conjunto de píxeles […]