ESTRUCTURA DE NODOS PARA REPRESENTAR OBJETOS TRIDIMENSIONALES USANDO IMÁGENES CON PROFUNDIDAD.
Una estructura de nodos para representar un objeto tridimensional,
comprendiendo la estructura de nodos: un campo de resoluciónoctárbol, en el cual se registra el máximo valor de las hojas terminales del octárbol a lo largo del lado de un cubo circundante que contiene un objeto; un campo de octárbol en el cual se registra una estructura del nodo interno del octárbol; un campo de índice de cámara en el cual se registran los índices de voxels del octárbol de una imagen de referencia correspondiente al nodo interno; y un campo de imagen en el cual se registra la imagen de referencia
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E02258158.
Solicitante: SAMSUNG ELECTRONICS CO., LTD..
Nacionalidad solicitante: República de Corea.
Dirección: 416, MAETAN-DONG, PALDAL-GU SUWON-CITY, KYUNGKI-DO REPUBLICA DE COREA.
Inventor/es: HAN,MAHN-JIN, Zhirkov,Alexander Olegovich, Park,In-kyu, Levkovich-Maslyuk,Leonid Ivanovich, Ignatenko,Alexey Victorovich, Bayakovski,Yuri Matveevich, Konouchine,Anton, Timasov,Dmitri Alexandrovich.
Fecha de Publicación: .
Fecha Solicitud PCT: 27 de Noviembre de 2002.
Clasificación Internacional de Patentes:
- G06T15/20B
- G06T17/00K
Clasificación PCT:
Clasificación antigua:
- G06T1/00 G06T […] › Tratamiento de datos de imagen, de aplicación general.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2374064_T3.pdf
Fragmento de la descripción:
Estructura de nodos para representar objetos tridimensionales usando imágenes con profundidad La presente invención se refiere a una estructura de nodos para representar objetos tridimensionales (3D) basados en imágenes con profundidad y, más específicamente, a una estructura de nodos para representar objetos usando imágenes con información de profundidad.
Desde el comienzo de las investigaciones sobre los gráficos tridimensionales (3D) , el fin último de los investigadores es sintetizar una escena gráfica realista, como una imagen real. Por lo tanto, se han llevado a cabo investigaciones sobre tecnologías tradicionales de representación, usando modelos poligonales y, como resultado, las tecnologías de modelización y representación se han desarrollado lo suficiente como para proporcionar entornos tridimensionales muy realistas. Sin embargo, el proceso para generar un modelo complicado necesita una gran cantidad de esfuerzos por parte de los expertos, y lleva mucho tiempo. Además, un entorno realista y complicado necesita una enorme cantidad de información y causa que se reduzca la eficacia en el almacenamiento y la transmisión.
Actualmente, los modelos poligonales se usan habitualmente para la representación de objetos tridimensionales en los gráficos por ordenador. Una forma arbitraria puede ser representada esencialmente por conjuntos de polígonos en color, es decir, triángulos. Algoritmos de software sumamente avanzados, y el desarrollo de hardware para gráficos, hacen posible visualizar objetos y escenas complejas como modelos poligonales de imágenes fijas y móviles considerablemente realistas.
Sin embargo, la búsqueda de representaciones tridimensionales alternativas ha sido muy activa durante la última década. Las principales razones para esto incluyen la dificultad de construir modelos poligonales para objetos del mundo real, así como la complejidad de representación y la calidad insatisfactoria para producir una escena fotográfica verdaderamente realista.
Las aplicaciones exigentes requieren enormes cantidades de polígonos; por ejemplo, el modelo detallado de un cuerpo humano contiene varios millones de triángulos, que no son fáciles de manipular. Aunque el progreso reciente en las técnicas de búsqueda de distancias, tales como el escáner de distancias por láser, nos permite adquirir datos densos de distancias con error tolerable, aún es muy caro y también muy difícil obtener un modelo poligonal completo sin fisuras del objeto entero. Por otra parte, los algoritmos de representación para obtener calidad fotográfica realista son complejos en términos de cálculo y, por tanto, están lejos de la representación en tiempo real.
Es un aspecto de esta invención proporcionar una estructura de nodos para representar objetos tridimensionales (3D) usando imágenes con profundidad, para gráficos y animación por ordenador, llamada representación basada en imágenes con profundidad (DIBR) , que ha sido adoptado en la Extensión del Entorno de Animación (AFX) del estándar MPEG-4.
Según un aspecto de la invención, una estructura de nodo según la reivindicación 1 es un campo de profundidad en el cual se registra un valor de profundidad para cada píxel.
Según la presente invención, el tiempo de representación para nodos basados en imágenes es proporcional al número de píxeles en las imágenes de referencia y de salida pero, en general, no a la complejidad geométrica, como en el caso poligonal. Además, cuando la representación basada en imágenes se aplica a los objetos y escenas del mundo real, la representación con realismo fotográfico de una escena natural se hace posible sin el uso de millones de polígonos y de cálculos caros.
Los objetos y ventajas anteriores de la presente invención devendrán más evidentes al describir en detalle las realizaciones preferidas de la misma, con referencia a los dibujos adjuntos, en los cuales:
la FIG. 1 es un diagrama de ejemplos de IBR integrados en software actual de referencia;
la FIG. 2 es un diagrama de una estructura de octárbol y del orden de los hijos;
la FIG. 3 es un gráfico que muestra la razón de compresión del Octárbol;
la FIG. 4 es un diagrama de ejemplos de una Imagen de Profundidad en Capas (LDI) : (a) muestra la proyección del objeto, donde las células oscuras (voxels) corresponden a los 1, y las células blancas a los 0, y (b) muestra una sección bidimensional en (x, profundidad) ;
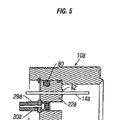
la FIG. 5 es un diagrama que muestra el componente de color del modelo del “Ángel”, después de recomponer sus datos de color;
la FIG. 6 es un diagrama que muestra la invariancia ortogonal de la probabilidad de ocurrencia de los nodos; (a) muestra los nodos actual y padre originales, y (b) muestra los nodos actual y padre, girados alrededor del eje y en 90 grados;
las FIGs. 7, 8 y 9 son figuras de compresión geométrica para el procedimiento basado en el mejor PPM (Mapa Portátil de Píxeles) ; la FIG. 10 es un diagrama que muestra dos formas de recomposición del campo de color del modelo de Textura Puntual del “Ángel” en una imagen bidimensional;
la FIG. 11 es un diagrama de ejemplos de geometría sin pérdidas y de compresión de color con pérdidas: (a) y (b) son, respectivamente, la versión original y la comprimida del modelo del “Ángel”, y (c) y (d) son, respectivamente, la versión original y comprimida del modelo “Morton256”;
la FIG. 12 es un diagrama que muestra un modelo BVO (Octárbol Volumétrico Binario) y un modelo TBVO (Octárbol Volumétrico Binario con Textura) del “Ángel”; la FIG. 13 es un diagrama que muestra imágenes adicionales tomadas por cámaras adicionales en el TBVO: (a) es una imagen de índice de cámara, (b) es una primera imagen adicional y (c) es una segunda imagen adicional;
la FIG. 14 es un diagrama que muestra un ejemplo de grabación de un flujo de TBVO: (a) muestra una estructura de árbol TBVO. El color gris es un símbolo de textura “indefinida”. Cada color indica un índice de cámara, (b) muestra el orden de recorrido del octárbol en un nodo de BVO y los índices de cámara; (c) muestra el flujo de TBVO resultante, en el cual los cubos rellenados y el cubo del octárbol indican, respectivamente, los octetos de textura y los octetos de BVO;
las FIGs. 15, 17, 18 y 19 son diagramas que muestran, respectivamente, los resultados de la compresión del TBVO de “Ángel”, “Morton”, “Palmera512” y “Robot512”; la FIG. 16 es un diagrama que muestra imágenes despojadas de los modelos “Ángel” y “Morton”; la FIG. 20 es un diagrama de un ejemplo de la imagen de textura y del mapa de profundidad; la FIG. 21 es un diagrama de un ejemplo de Imagen de Profundidad en Capas (LDI) : (a) muestra la Proyección del
objeto y (b) muestra píxeles en capas; la FIG. 22 es un diagrama de un ejemplo de Textura de Cuadro (BT) , en el cual se usan seis TexturasSimples (pares de imagen y mapa de profundidad) para representar el modelo mostrado en el centro;
la FIG. 23 es un diagrama de un ejemplo de Textura de Cuadro Generalizada (GBT) :
(a) muestra ubicaciones de cámara para el modelo ‘Palmera', (b) muestra planos de imagen de referencia para el mismo modelo (se usan 21 TexturasSimples) ; la FIG. 24 es un diagrama de un ejemplo que muestra la representación en Octárbol ilustrada en 2 dimensiones: (a) muestra una ‘nube de puntos', (b) muestra los correspondientes mapas medios;
la FIG. 25 es seudocódigo para grabar el flujo de bits de TBVO; la FIG. 26 es un diagrama que muestra la especificación de los nodos de DIBR; la FIG. 27 es un diagrama del modelo de volumen de vista para la Imagen con Profundidad; (a) es una vista en perspectiva, (b) es una vista ortográfica; la FIG. 28 es seudocódigo de representación basada en OpenGL de la TexturaSimple; la FIG. 29 es un diagrama de un ejemplo que muestra la compresión de una imagen de referencia en TexturaSimple: (a)
muestra la imagen de referencia original y (b) muestra la imagen de referencia modificada en un formato de JPEG; la FIG. 30 es un diagrama de un ejemplo que muestra el resultado de representación del modelo “Morton” en distintos formatos; (a) está en un formato poligonal original, (b) está en un formato de Imagen con Profundidad y (c) está en un formato de Imagen de Octárbol; la FIG. 31... [Seguir leyendo]
Reivindicaciones:
1. Una estructura de nodos para representar un objeto tridimensional, comprendiendo la estructura de nodos:
un campo de resoluciónoctárbol, en el cual se registra el máximo valor de las hojas terminales del octárbol a lo largo del lado de un cubo circundante que contiene un objeto; un campo de octárbol en el cual se registra una estructura del nodo interno del octárbol; un campo de índice de cámara en el cual se registran los índices de voxels del octárbol de una imagen de referencia correspondiente al nodo interno; y un campo de imagen en el cual se registra la imagen de referencia.
2. La estructura de nodos según la reivindicación 1, en la cual el nodo interno está representado por un octeto, y la información de nodos registrada en los flujos de bits que constituyen el octeto representa la presencia o ausencia de nodos hijos de nodos hijos pertenecientes al nodo interno.
3. La estructura de nodos según la reivindicación 1, en la cual la imagen de referencia es una imagen con profundidad que incluye información de punto de vista y una imagen en color correspondiente a la información de punto de vista.
4. La estructura de nodos según la reivindicación 3, en el cual la información de punto de vista comprende: un campo de punto de vista en el cual se registran los puntos de vista desde los cuales se visualiza un plano de imagen; un campo de campoDeVisión en el cual se registra un área de visibilidad desde el punto de vista hasta el plano de
imagen; y un campo ortográfico en el cual se registra un procedimiento de proyección desde el punto de vista hasta el plano de imagen.
5. La estructura de nodos según la reivindicación 4, en la cual el campo de punto de vista comprende:
un campo de posición donde se registra la posición de un punto de vista; y un campo de orientación donde se registra la orientación del punto de vista, siendo la posición una ubicación relativa al origen del sistema de coordenadas, y siendo la orientación una magnitud de rotación con respecto a la orientación por omisión.
6. La estructura de nodos según la reivindicación 4, en la cual el procedimiento de proyección es un procedimiento de proyección ortogonal, y el ancho y la altura del área de visibilidad corresponden, respectivamente, al ancho y a la altura de un plano de imagen.
7. La estructura de nodos según la reivindicación 3, en la cual la imagen en color es una TexturaSimple que consiste en una imagen plana que contiene el color para cada píxel.
Patentes similares o relacionadas:
APARATO Y PROCEDIMIENTO PARA REPRESENTAR OBJETOS TRIDIMENSIONALES USANDO IMÁGENES CON PROFUNDIDAD, del 13 de Febrero de 2012, de SAMSUNG ELECTRONICS CO., LTD.: Un aparato de representación de objetos tridimensionales (3D) basados en imágenes con profundidad, que comprende: un generador de información de punto de vista […]
 COMBINACION DE UN SISTEMA DE INFLADO DE NEUMATICOS AUTOMATICO Y UN SISTEMA DE FRENOS ANTIBLOQUEO, del 14 de Octubre de 2010, de EQUALAIRE SYSTEMS, INC.: Un vehículo que comprende un sistema de frenos antibloqueo, un suministro de aire y un sistema de inflado de neumáticos automático combinado […]
COMBINACION DE UN SISTEMA DE INFLADO DE NEUMATICOS AUTOMATICO Y UN SISTEMA DE FRENOS ANTIBLOQUEO, del 14 de Octubre de 2010, de EQUALAIRE SYSTEMS, INC.: Un vehículo que comprende un sistema de frenos antibloqueo, un suministro de aire y un sistema de inflado de neumáticos automático combinado […]
 PROCEDIMIENTO BASADO EN IMÁGENES DE REPRESENTACIÓN Y REPRODUCCIÓN DE OBJETOS TRIDIMENSIONALES, del 14 de Febrero de 2011, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de representación y reproducción de un objeto en tres dimensiones, que comprende las etapas de: la transformación de los datos originales […]
PROCEDIMIENTO BASADO EN IMÁGENES DE REPRESENTACIÓN Y REPRODUCCIÓN DE OBJETOS TRIDIMENSIONALES, del 14 de Febrero de 2011, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de representación y reproducción de un objeto en tres dimensiones, que comprende las etapas de: la transformación de los datos originales […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
CONFIGURACIÓN Y VISUALIZACIÓN DE UNA INTERFAZ DE USUARIO CON ESTUDIOS DE ATENCIÓN SANITARIA, del 22 de Mayo de 2020, de FUJIFILM MEDICAL SYSTEMS USA INC: Configuración y visualización de una interfaz de usuario con estudios de atención sanitaria. Método y aparato para configurar y visualizar una interfaz de […]
Dispositivo y procedimiento de generación de imágenes de guía utilizando parámetros, del 13 de Mayo de 2020, de CJ CGV Co., Ltd: Un dispositivo de generación de imágenes de guía que comprende: una unidad de generación de imágenes de guía configurada para generar una imagen […]
Procedimiento y sistema para la calibración de un sistema de visión por ordenador, del 1 de Abril de 2020, de Oy Mapvision Ltd: Procedimiento para la calibración de un sistema de visión por ordenador tridimensional, comprendiendo dicho procedimiento las etapas de: disponer […]
Marcado remoto de pasaporte y documento de seguridad, del 29 de Enero de 2020, de SICPA HOLDING SA: Un sistema para marcar remotamente un documento de seguridad, tal como un pasaporte , con un correspondiente sello, etiqueta o visado virtual, que comprende: - una […]