DISPOSITIVO ROBOTIZADO PARA LA INSPECCIÓN DE CONDUCTOS.
Dispositivo robotizado para la inspección de conductos, ápodo,
modular e hiper-redundante, de forma cilíndrica y naturaleza flexible, que comprende
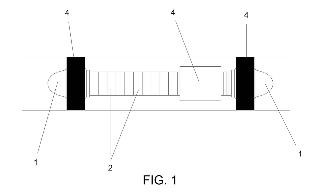
- dos cabezales (1, 1') dirigibles y orientables,
- al menos dos módulos (2), todos iguales entre sí, cada uno de dichos módulos (2) formado por dos coronas (3, 3') circulares adyacentes de material rígido, estando constituida cada una de dichas coronas (3, 3') de una pluralidad de elementos magnetizables (31, 32, 33, 34) independientes que generan un campo magnético de intensidad y sentido controlados,
- tres balones (4) de anclaje y posicionamiento del dispositivo,
de manera que la expansión y contracción de los módulos (2) se genera a través de interacciones entre dichos módulos (2) producidas por fuerzas electromagnéticas, originando el desplazamiento del dispositivo la secuencia ordenada de expansiones y contracciones de los módulos (2).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030006.
Solicitante: FUNDACION CARTIF.
Nacionalidad solicitante: España.
Inventor/es: DE LA FUENTE DIEZ,DAVID, FRAILE MARINERO,JUAN CARLOS, PEREZ TURIEL,JAVIER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16L55/32 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16L TUBERIAS O TUBOS; EMPALMES U OTROS ACCESORIOS PARA TUBERIAS; SOPORTES PARA TUBOS, CABLES O CONDUCTOS PROTECTORES; MEDIOS DE AISLAMIENTO TERMICO EN GENERAL. › F16L 55/00 Dispositivos o accesorios para utilizarlos con o en relación con los sistemas de tubos (F16L 1/00 - F16L 53/00, F16L 57/00, F16L 59/00 tienen prioridad; reparación o montaje de los tubos sobre o bajo el agua F16L 1/26; limpieza de tuberías B08B 9/02, p. ej. eliminación de obstrucciones B08B 9/027; dispositivos para evitar que revienten las canalizaciones por efecto del hielo E03B 7/10). › autónomos.
Fragmento de la descripción:
Dispositivo robotizado para la inspección de conductos.
Objeto de la invención
La presente invención trata de un dispositivo robotizado para la inspección, actuación y recogida de muestras del interior de conductos, especialmente concebido para aquellas canalizaciones de diámetro reducido, cuya actividad se fundamenta en la interacción entre sus módulos constructivos basada en la acción controlada de fuerzas electromagnéticas.
Antecedentes de la invención
Los sistemas que actualmente existen para la inspección de canalizaciones no permiten, debido a la tecnología utilizada para generar el desplazamiento, ni una miniaturización, ni una precisión, ni una autonomía adecuada a entornos especializados donde cada vez más se demandan soluciones con estas características.
La patente ES 2006544 describe un robot redundante de tipo modular, que permite desplazar un terminal de una situación inicial hacia una situación final. Este dispositivo comprende una sucesión de módulos, cada uno constituido por una plataforma y por seis accionadores dispuestos según una arquitectura angulada cerrada, un sistema de captadores asociado a cada módulo, y unos medios de mando que permiten determinar una configuración del dispositivo que corresponde a la situación final a alcanzar por el terminal y para condicionar los accionadores para disponer los diversos módulos según esta configuración. Estos medios de mando comprenden en particular medios de almacenado de los espacios accesibles para cada plataforma, medios de toma de la situación final a alcanzar, medios de cálculo de la configuración del dispositivo, y medios de cálculo de estados de los accionadores y una interfaz de condicionamiento de estos últimos. Es este robot de diseño convencional de n módulos, cada módulo tiene la estructura de una plataforma de stewart, y los accionadores de los tres vástagos lineales, en cada uno de los módulos, son motores eléctricos.
La patente ES 2017909 describe un aparato para inspeccionar el interior de canalizaciones que consta de un cuerpo central con tres brazos a 120º dispuestos en cada uno de sus extremos, pudiendo apoyarse dichos extremos contra la superficie interna de la canalización. La técnica de desplazamiento utilizada es una versión elemental del método conocido como inchworm gait en el campo de la robótica móvil. El diseño del dispositivo hace muy difícil su miniaturización.
En la patente ES 2066559 se describe un vehículo de inspección de canalizaciones que comprende un cuerpo, un electroimán para generar flujo magnético y dos bloques de chapa para conducir el flujo en y fuera de la pared de la canalización. Se dispone de un conjunto de detectores de defectos alrededor del cuerpo, estando montado cada detector en un conjunto. La técnica de desplazamiento descrita combina diferentes tecnologías, diferencias de presión entre los extremos del conducto con el uso de ruedas y elementos de tracción externos. Se hace uso de campos magnéticos para detectar defectos en el conducto mediante la técnica de fugas de flujo.
La patente ES 2151149 describe un dispositivo para la inspección de conductos cuyo diseño facilita su miniaturización. Utiliza accionamientos neumáticos y su utilidad básica es desplazarse por el interior de conductos para labores de inspección, detección, etc.
Ninguno de estos documentos anteriormente citados tiene una estructura modular ni hiper-redundante. Además, los desplazamientos de cada uno de los dispositivos de inspección se realizan a través de diferentes técnicas, pero sin el uso de fuerzas electromagnéticas.
El documento ES 2174070 describe un dispositivo para la inspección de conductos, siendo un dispositivo móvil modular e hiper-redundante. La estructura incluye módulos especializados de desplazamiento, anclaje, detección, etc. Este dispositivo, a pesar de ser modular e hiper-redundante, no es ápodo. Utiliza ruedas movidas por motores para su desplazamiento, y dicho desplazamiento no se consigue mediante la interacción de fuerzas electromagnéticas. Lo mismo ocurre con el documento ES 2249599.
El documento CN 101486190 describe el diseño de un dedo accionado electromagnéticamente para la mano de un robot antropomorfo. Aplica fuerzas electromagnéticas para producir desplazamientos, pero no es un dispositivo móvil, su diseño no se basa en diferentes módulos, y dependiendo de la implementación el resultado puede ser hiper-redundante.
El documento EP 0017016 describe un dispositivo modular e hiper-redundante. Los accionadores de los tres vástagos lineales, en cada uno de los módulos, son motores eléctricos. El diseño de su estructura se obtiene al encadenar n módulos, fijo por un extremo y con la posibilidad de colocar un útil en el otro. Las diferentes configuraciones del dispositivo se consiguen mediante las diferentes fuerzas de tracción ejercidas en cuatro cables que ensartan la secuencia lineal de módulos. La forma de estos y la posición relativa entre ellos que se consigue al aplicar las fuerzas determina la configuración obtenida y la posición y orientación del efector. Sin embargo, no es un dispositivo móvil, y los desplazamientos no se consiguen mediante la interacción de fuerzas electromagnéticas.
Descripción de la invención
La invención propuesta describe un dispositivo robotizado para la inspección de conductos. Este dispositivo es móvil, bio-inspirado, ápodo, modular e hiper-redundante, donde su desplazamiento y posicionamiento se consigue mediante accionadores electromagnéticos, lo cual, junto con la morfología del dispositivo, permite su movimiento autónomo y/o controlado/supervisado, haciéndolo adecuado para la inspección, actuación y recogida selectiva de muestras en el interior de conductos de diámetro reducido.
Los sistemas actuales no permiten, debido a la tecnología utilizada para generar el desplazamiento, ni una miniaturización, ni precisión, ni una autonomía adecuada a entornos especializados, donde cada vez más se demandan soluciones con estas características.
Así, el objeto principal de la invención trata de obtener un diseño de dispositivo móvil modular hiper-redundante cuyo desplazamiento y posicionamiento se consigue mediante la interacción mutua entre módulos, basada en la acción controlada de fuerzas electromagnéticas.
El dispositivo presenta forma cilíndrica, con diámetro muy inferior a los dispositivos actualmente existentes. Dependiendo de las necesidades y del tipo de aplicación, el dispositivo tiene la capacidad de funcionar de forma "autónoma" sin fuentes de alimentación ni propulsión externa, y de forma "no autónoma", con fuentes de alimentación y propulsión externa.
El dispositivo tiene la posibilidad de alternar los siguientes modos de control:
- Funcionamiento supervisado y/o controlado por personal cualificado.
- Funcionamiento "en modo automático" en base a la/s heurísticas y/o el/los algoritmo/s preprogramados.
Además, el dispositivo es capaz de avanzar y retroceder indistintamente, y la velocidad puede ser regulada, supervisada y controlada por un operador. Los dos extremos del dispositivo móvil pueden ser utilizados como cabezas dirigibles y orientables, siendo un dispositivo altamente flexible.
El dispositivo permite también la incorporación y gestión adecuada de herramientas de trabajo específicamente diseñadas removibles e intercambiables como por ejemplo "pinzas".
El elemento constitutivo elemental del dispositivo robotizado para la inspección de conductos es una corona circular de material rígido que se puede considerar formada por trapecios circulares. En esta corona se disponen elementos independientes capaces de generar de forma controlada campos electromagnéticos al hacer circular a través de cada uno de ellos corrientes de intensidad y sentido controlado. Estos campos electromagnéticos generados son capaces de generar la fuerza electromagnética de atracción y/o repulsión necesaria para producir un desplazamiento relativo sobre un elemento análogo próximo.
Aunque el campo electromagnético generado, y la fuerza asociada, depende, en magnitud y dirección, del tipo de material y de la geometría del conductor atravesado por una corriente, los valores concretos resultantes no afectan al principio de diseño. Los cálculos, simulaciones y ensayos experimentales realizados con espiras y bobinas circulares de diferentes materiales y con distintos rangos de corriente, permiten determinar los...
Reivindicaciones:
1. Dispositivo robotizado para la inspección de conductos, de tipo ápodo, modular e hiper-redundante, de forma cilíndrica y naturaleza flexible, que permite el desplazamiento de dicho dispositivo a través del interior de conductos de diámetro reducido para la inspección, actuación y recogida selectiva de muestras caracterizado porque comprende
- dos cabezales (1, 1') dirigibles y orientables,
- al menos dos módulos (2), todos iguales entre sí, donde cada uno de dichos módulos (2) está formado por dos coronas (3, 3') circulares adyacentes de material rígido, estando dispuestos longitudinalmente a lo largo de un eje común que coincide con el centro de las coronas (3, 3') circulares, y estando constituida cada una de dichas coronas (3, 3') de una pluralidad de elementos magnetizables (31, 32, 33, 34) independientes que generan un campo magnético de intensidad y sentido controlados,
- tres balones (4) de anclaje y posicionamiento del dispositivo, que se dilatan y contraen a través de medios de control de manera independiente de la técnica empleada para la fijación de dicho dispositivo,
de manera que la expansión y contracción de los módulos (2) se genera a través de interacciones entre dichos módulos (2) producidas por fuerzas electromagnéticas, manteniendo siempre dos de los tres balones (4) dilatados para garantizar el anclaje del dispositivo durante el desplazamiento y posibilitar el posicionamiento preciso del mismo, y originando el desplazamiento del dispositivo la secuencia ordenada de expansiones y contracciones de los módulos (2).
2. Dispositivo robotizado para la inspección de conductos, según reivindicación 1, caracterizado porque el número de coronas (3, 3') es siempre igual al número de módulos (2) más uno.
3. Dispositivo robotizado para la inspección de conductos, según reivindicaciones anteriores, caracterizado porque dispone de medios de control para el funcionamiento supervisado y/o controlado por personal cualificado.
4. Dispositivo robotizado para la inspección de conductos, según reivindicaciones anteriores, caracterizado porque dispone de medios de control para el funcionamiento en modo automático.
5. Dispositivo robotizado para la inspección de conductos, según reivindicaciones anteriores, caracterizado porque dispone de medios para el acoplamiento de herramientas específicamente diseñadas de trabajo removibles e intercambiables.
6. Dispositivo robotizado para la inspección de conductos, según reivindicaciones anteriores, caracterizado porque dispone de medios para el funcionamiento de forma autónoma.
7. Dispositivo robotizado para la inspección de conductos, según reivindicaciones 1 a 5, caracterizado porque su funcionamiento es dependiente de medios tales como de fuentes de alimentación y propulsión externas.
8. Dispositivo robotizado para la inspección de conductos, según reivindicaciones anteriores, caracterizado porque dispone de un operador para regular, supervisar y controlar la velocidad de avance y retroceso, pudiendo ambos cabezales (1, 1') actuar como cabezas dirigibles y orientables.
9. Dispositivo robotizado para la inspección de conductos, según reivindicaciones anteriores, caracterizado porque cada módulo (2) está formado por dos coronas (3, 3') circulares adyacentes, comprendiendo cada corona (3, 3') cuatro elementos magnetizables (31, 32, 33, 34), y formando parte cada una de dichas coronas (3, 3') a dos módulos (2) consecutivos, disponiendo de este modo el módulo (2) de ocho elementos magnetizables enfrentados entre sí dos a dos, existiendo tres grado de libertad en cada módulo (2).
10. Dispositivo robotizado para la inspección de conductos, según reivindicaciones anteriores, caracterizado porque los balones (4) se contraen y dilatan a través de medios que generan una secuencia de control, que permite su expansión y contracción sincronizada de manera que se produce el anclaje, avance, retroceso y posicionamiento preciso del dispositivo.
11. Dispositivo robotizado para la inspección de conductos, según reivindicaciones anteriores, caracterizado porque el anclaje, avance, retroceso y posicionamiento del dispositivo es independiente de la técnica de generación del desplazamiento relativo entre módulos.
12. Dispositivo robotizado para la inspección de conductos, según reivindicaciones anteriores, caracterizado porque la geometría de los elementos magnetizables (31, 32, 33, 34) es variable, siendo preferentemente trapecios circulares enfrentados entre sí dos a dos.
Patentes similares o relacionadas:
 HERRAMIENTA INTELIGENTE PARA LA DETECCIÓN DE PERFORACIONES, CASCOTAS Y ABOLLADURAS EN TUBERÍAS DE TRANSPORTE, del 26 de Junio de 2014, de ECOPETROL S.A: La presente invención hace referencia a una herramienta de inspección en linea, diseñada para detectar perforaciones, soldaduras, cascotas, abolladuras y […]
HERRAMIENTA INTELIGENTE PARA LA DETECCIÓN DE PERFORACIONES, CASCOTAS Y ABOLLADURAS EN TUBERÍAS DE TRANSPORTE, del 26 de Junio de 2014, de ECOPETROL S.A: La presente invención hace referencia a una herramienta de inspección en linea, diseñada para detectar perforaciones, soldaduras, cascotas, abolladuras y […]
Procedimiento y dispositivo para la comprobación de un cordón de soldadura anular de una conducción principal de medio de refrigeración conectada al recipiente de presión del reactor de una central nuclear, del 15 de Abril de 2013, de AREVA NP GMBH: Procedimiento para la comprobación de un cordón de soldadura de una conducción principal de mediode refrigeración, conectada al recipiente de presión del reactor […]
APARATO DE INSPECCION CON UNA CAMARA DE VIDEO PARA ESPACIOS HUECOS., del 16 de Julio de 2006, de ROTHENBERGER WERKZEUGE AKTIENGESELLSCHAFT: Aparato unitario portátil para la inspección de espacios huecos, en especial de tuberías, con una cámara de vídeo , un cable de señales y con una estructura de bastidor […]
CARRO DE TRASLACION POR CANALES OVALADOS., del 16 de Mayo de 2006, de FIRSTER, DIRK: Carro de traslación por canales ovalados para un robot de canalización con una unidad de accionamiento y con al menos una rueda accionada, en el que entre […]
SISTEMA ROBOTIZADO PARA INSPECCIONAR CONDUCCIONES DE GAS., del 1 de Abril de 2006, de CARNEGIE MELLON UNIVERSITY: Un sistema de inspección de condiciones elegidas de una tubería que consiste en: un tren autopropulsado que comprende: una serie de módulos (12, […]