Disposición y procedimiento para el control de un accionamiento de un medio de transporte autopropulsado sin conductor.
Disposición para el control de un accionamiento (ANTR) de un medio de transporte autopropulsado sin conductor(EMS),
donde el accionamiento (ANTR) de un medio de transporte (EMS) o los accionamientos (ANTR) de variosmedios de transporte (EMS) sin conductor es o son controlado/s por medio de un dispositivo de control fijo (STRG),caracterizado porque a lo largo de un trayecto del medio de transporte sin conductor (EMS) está ubicada unacadena de fuentes de luz (segmentos) diseñada como luz secuencial (LL); porque junto al medio de transporte sinconductor (EMS) están ubicados, uno tras otro, en la dirección de movimiento, por lo menos dos sensores ópticos(OS1, OS2) para la lectura de la luz secuencial, donde los sensores (OS1, OS2), que son por lo menos dos, estánconectados al accionamiento (ANTR) del medio de transporte sin conductor (EMS) de manera tal que el medio detransporte sin conductor (EMS) siga esencialmente de forma sincrónica un segmento luminoso (AS) de la luzsecuencial (LL), y porque el dispositivo de control fijo (STRG) está ajustado para el control de la luz secuencial (LL).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09013664.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: Müller,Oswald.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B61L23/18 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61L CONTROL DE TRAFICO FERROVIARIO; SEGURIDAD DEL TRAFICO FERROVIARIO (frenos o equipos auxiliares B61H, B61K; estructura de sistemas de agujas E01B). › B61L 23/00 Dispositivos de control, de aviso u otros dispositivos de seguridad a lo largo de la vía o entre los vehículos o los trenes. › especialmente adaptados para mantener una distancia de seguridad entre los vehículos o los trenes en función de la velocidad o la densidad de tráfico.
- B61L27/04 B61L […] › B61L 27/00 Sistemas centrales de control del tráfico. › Sistemas automáticos, p. ej. mandados por los trenes; Paso al mando manual.
PDF original: ES-2387237_T3.pdf
Fragmento de la descripción:
Disposición y procedimiento para el control de un accionamiento de un medio de transporte autopropulsado sin conductor.
La presente invención hace referencia a una disposición para el control de un accionamiento de un medio de transporte autopropulsado sin conductor, conforme al concepto general de la reivindicación 1, y un procedimiento para el control del accionamiento de un medio de transporte autopropulsado sin conductor, conforme al concepto general de la reivindicación 6.
Como parte de la automatización progresiva de las tareas de transporte, sobre todo en el área de la producción de automóviles y otros bienes, a menudo se utilizan medios de transporte sin conductor. Por ejemplo, para las líneas de producción de la industria automotriz se utilizan monocarriles eléctricos suspendidos (EHB) para el transporte de carrocerías y piezas de montaje. Estos medios de transporte, a menudo llamados también EMS = Electrical Monorail System, por lo general están compuestos por un sistema de rieles y los vehículos pertenecientes a éstos, que la mayoría de las veces están suspendidos. Estos medios de transporte cuentan con un accionamiento eléctrico propio y son abastecidos con energía eléctrica por medio de tomacorrientes (contactos por rozamiento) , que son conducidos a lo largo de un sistema de carriles - tomacorriente polifásico.
En áreas de circulación especiales (áreas de producción) , normalmente se realizan trabajos en los productos que están siendo transportados. En dichas áreas de circulación es necesario que los medios de transporte sin conductor se muevan a velocidades constantes y/o con distancias constantes entre sí. Se puede cumplir con este requerimiento dotando a los medios de transporte sin conductor de un control numérico, que se comunica con un control externo (fijo) y activa el accionamiento de los medios de transporte sin conductor de manera tal que éstos marchen a la velocidad preestablecida y/o de manera sincrónica entre sí.
La solicitud US 6.138.064 muestra un sistema de control para vehículos sin conductor con un objetivo móvil.
En tal caso, es requisito para la utilización de un procedimiento de ese tipo, que cada uno de los medios de transporte sin conductor esté dotado de un control que sea lo suficientemente eficiente, por ejemplo de un sistema de microprocesador. Pero en muchos sistemas de transporte sin conductor simples esto no es así; en éstos se utilizan a menudo accionamientos simples, los cuales se conducen de manera electromecánica por medio de interruptores magnéticos con enclavamiento a través de elementos de control ubicados de forma fija en el trayecto, donde con frecuencia solamente se diferencia dos estados que son de "marcha" y "detención" y donde un interruptor anticolisión evita la colisión de dos medios de transporte sin conductor por medio de la desconexión de uno o varios medios de transporte sin conductor. Para evitar el costoso equipamiento de cada uno de los medios de transporte sin conductor con un control alfanumérico o algo similar, es conocido en el actual estado de la técnica, que en las áreas de circulación especial, en las cuales es necesaria una marcha sincronizada y/o constante de los medios de transporte sin conductor, se disponga de un transportador de cadena de arrastre mecánico diseñado, por ejemplo, como una cadena rotatoria. Luego, en estas áreas de producción especiales, se desacopla el accionamiento propio de los medios de transporte sin conductor y éstos se acoplan de manera rígida a los medios de transporte de cadena de arrastre, de manera que todos los medios de transporte sin conductor que fueron acoplados sean movidos de manera sincrónica y equidistante. Al final de las áreas de producción especiales, los medios de transporte sin conductor se vuelven a desacoplar del transportador de cadena de arrastre y retoman su funcionamiento automático. Una desventaja de esta solución es que en el diseño del transportador de cadena de arrastre se debe prever un accionamiento separado para cada área de circulación especial. Entonces, a pesar de que los medios de transporte ya están equipados con un accionamiento propio, para las áreas de producción especiales consideradas se deben prever estaciones de acoplado y desacoplado adicionales, el transportador de cadena de arrastre adicional, dispositivos de arrastre para los medios de transporte sin conductor, un suministro de energía adicional, etc. Las velocidades variables y las funciones de inicio/detención son manejadas, en ese caso, por un sistema de control del equipo fijo, a través de una regulación de la velocidad del accionamiento del transportador de cadena (cadena de arrastre) .
El objeto de la presente invención es proponer, en dichas áreas de producción especiales, un control para medios de transporte sin conductor que sea simple en lo que respecta a la construcción y seguro.
El objeto se logra mediante una disposición acorde a la reivindicación 1 y mediante un procedimiento acorde a la reivindicación 6.
Una idea central de la solución acorde a la invención es que, en vez del transportador de cadena de arrastre mecánico, es decir del acoplamiento del medio de transporte sin conductor a un dispositivo de arrastre mecánico, se realice una “señal de arrastre” en forma de luz de un tubo de luz secuencial, o algo similar, montado en el carril de desplazamiento. La velocidad de marcha y las funciones de inicio/detención se controlan a través de la activación de la/s secuencia/s de luz del tubo de luz secuencial. Por parte del medio de transporte sin conductor o de los medios
de transporte sin conductor se realiza la evaluación de las señales de luz del tubo de luz secuencial por medio de un sistema de sensores igualmente sencillo que, por ejemplo, activa un convertidor de corriente del accionamiento, que de todas formas ya se encuentra allí.
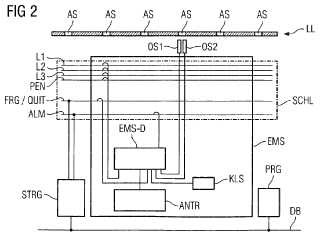
El objeto se logra, sobre todo, por una disposición para el control de un accionamiento de un medio de transporte autopropulsado sin conductor, donde el accionamiento de un medio de transporte o los accionamientos de varios medios de transporte sin conductor es o son controlado/s por medio de un dispositivo de control fijo. Allí, a lo largo de un trayecto del medio de transporte sin conductor, está ubicada una cadena de fuentes de luz (segmentos) diseñada como luz secuencial, donde junto al medio de transporte sin conductor están ubicados, uno tras otro en la dirección de movimiento, por lo menos dos sensores ópticos para la lectura de la luz secuencial, donde los sensores, que son por lo menos dos, están conectados al accionamiento del medio de transporte sin conductor de manera tal que el medio de transporte sin conductor siga esencialmente de forma sincrónica un segmento luminoso de la luz secuencial, y donde el dispositivo de control fijo esté ajustado para el control de la luz secuencial. Con una disposición de ese tipo se pueden lograr claros ahorros en el montaje del equipo para estructuras con medios de transporte sin conductor, por ejemplo en la fabricación de automóviles. Con un gasto relativamente bajo en componentes eléctricos se pueden ahorrar por completo los transportadores de cadena de arrastre adicionales. También las estaciones de bloqueo y desbloqueo adicionales (estaciones de acoplamiento y desacoplamiento) se pueden ahorrar. El gasto técnico completo por parte del medio de transporte sin conductor también es bajo, ya que solamente se deben evaluar las señales (por lo general binarias) de los sensores de luz; con ello es posible la utilización de sistemas de control simples, por ejemplo “convertidores de frecuencia” con una lógica auxiliar binaria, como control de vehículos.
El objeto también se logra por medio de un procedimiento para el control del movimiento de uno o varios medios de transporte sin conductor a lo largo de un trayecto, donde el movimiento de uno o varios medios de trasporte sin conductor está preestablecido por un control fijo. Allí, por medio del control fijo se activa a lo largo del trayecto una cadena de fuentes de luz diseñada como luz secuencial, donde la velocidad y la posición de los segmentos de luz activos de la luz secuencial representan una especificación nominal para el o los medios de transporte sin conductor, y la luz secuencial es detectada por lo menos por dos sensores ópticos de por lo menos uno de los medios de transporte sin conductor, ubicados uno detrás del otro en la dirección de marcha. Allí se utilizan las señales de salida de por lo menos dos sensores para el control de un accionamiento de por lo menos... [Seguir leyendo]
Reivindicaciones:
1. Disposición para el control de un accionamiento (ANTR) de un medio de transporte autopropulsado sin conductor (EMS) , donde el accionamiento (ANTR) de un medio de transporte (EMS) o los accionamientos (ANTR) de varios medios de transporte (EMS) sin conductor es o son controlado/s por medio de un dispositivo de control fijo (STRG) , caracterizado porque a lo largo de un trayecto del medio de transporte sin conductor (EMS) está ubicada una cadena de fuentes de luz (segmentos) diseñada como luz secuencial (LL) ; porque junto al medio de transporte sin conductor (EMS) están ubicados, uno tras otro, en la dirección de movimiento, por lo menos dos sensores ópticos (OS1, OS2) para la lectura de la luz secuencial, donde los sensores (OS1, OS2) , que son por lo menos dos, están conectados al accionamiento (ANTR) del medio de transporte sin conductor (EMS) de manera tal que el medio de transporte sin conductor (EMS) siga esencialmente de forma sincrónica un segmento luminoso (AS) de la luz secuencial (LL) , y porque el dispositivo de control fijo (STRG) está ajustado para el control de la luz secuencial (LL) .
2. Disposición acorde a la reivindicación 1, caracterizada porque el medio de transporte sin conductor (EMS) presenta un regulador de velocidad para el accionamiento (ANTR) que puede ser controlado por los sensores, que son por lo menos dos.
3. Disposición acorde a una de las reivindicaciones anteriores, caracterizada porque los sensores son palpadores de luz con una señal de salida binaria cada uno.
4. Disposición acorde a una de las reivindicaciones anteriores, caracterizada porque el accionamiento (ANTR) está configurado para la realización de una parada de emergencia en los casos en que ninguno de los sensores, que son por lo menos dos, detecte un segmento luminoso.
5. Disposición acorde a una de las reivindicaciones anteriores, caracterizada porque el control fijo está ajustado para la aceleración y el frenado del medio de transporte sin conductor (EMS) o de todos los medios de transporte sin conductor (EMS) por medio un control de la velocidad de la luz secuencial (LL) .
6. Procedimiento para el control del movimiento de uno o varios medios de transporte sin conductor (EMS) a lo largo de un trayecto, donde el movimiento del o de los medio/s de transporte sin conductor (EMS) está preestablecido por un control fijo, caracterizado porque por medio del control fijo se activa a lo largo del trayecto una cadena de fuentes de luz diseñada como una luz secuencial (LL) , donde la velocidad y la posición de uno o varios segmentos luminosos (AS) de la luz secuencial (LL) representan una especificación nominal para el o los medios de transporte sin conductor; porque la luz secuencial (LL) es detectada por lo menos por dos sensores ópticos de por lo menos uno de los medios de transporte sin conductor (EMS) , ubicados uno detrás del otro en la dilección de marcha; porque las señales de salida de por lo menos dos sensores se utilizan para el control de un accionamiento (ANTR) de por lo menos uno de los medios de transporte sin conductor (EMS) , donde los sensores están conectados con el accionamiento (ANTR) de manera tal que se produce un movimiento esencialmente sincrónico de por lo menos uno de los medios de transporte sin conductor (EMS) con por lo menos un segmento luminoso (AS) de la luz secuencial (LL) .
Patentes similares o relacionadas:
Sistema y procedimiento para el acoplamiento / desacoplamiento de vehículos guiados en movimiento durante el funcionamiento, del 1 de Julio de 2020, de Siemens Rail Automation S.A.U: Procedimiento para el acoplamiento / desacoplamiento de una unidad de vehículo guiado A2 a/de una unidad de vehículo guiado A1, mientras que dichas unidades de vehículos guiados […]
 Disposiciones de estación de accionamiento, del 29 de Enero de 2020, de Rail-Veyor Technologies Global Inc: Un conjunto de accionamiento para un sistema de transporte ferroviario para transportar materiales a granel a través de una pluralidad de vagones adaptados para formar […]
Disposiciones de estación de accionamiento, del 29 de Enero de 2020, de Rail-Veyor Technologies Global Inc: Un conjunto de accionamiento para un sistema de transporte ferroviario para transportar materiales a granel a través de una pluralidad de vagones adaptados para formar […]
Sistema de localización de trenes a lo largo de las vías de una red ferroviaria, del 18 de Diciembre de 2019, de CLEARSY: Sistema de localización de trenes a lo largo de las vías de una red ferroviaria para una arquitectura de control automático de trenes, […]
Vehículo de transporte de artículos, del 20 de Noviembre de 2019, de DAIFUKU CO., LTD.: Un vehículo de transporte de artículos para usar en una instalación de transporte de artículos en la que una pluralidad de vehículos de transporte de artículos se […]
Sistema y procedimiento para la evacuación de vehículos ferroviarios, del 24 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para instalar automáticamente una zona de protección alrededor de un vehículo ferroviario en evacuación (Rail Vehicle in Evacuation) - en lo […]
Procedimiento para controlar un vehículo de transporte terrestre, vehículo de transporte terrestre, equipo terrestre y sistema de transporte, del 2 de Octubre de 2019, de ALSTOM Transport Technologies: Procedimiento para controlar un vehículo de transporte terrestre que viaja en una vía, comprendiendo la pista, en una dirección de desplazamiento del vehículo de transporte […]
Procedimiento para implementar un tráfico ferroviario automático y sistema de tráfico ferroviario para implementar un tráfico ferroviario automático, del 27 de Marzo de 2019, de Siemens Mobility GmbH: Procedimiento para implementar un tráfico ferroviario automático con un control de trenes automático y protección de trenes por medio de comunicación de datos entre un […]
Asegurar una transmisión a distancia de un vídeo para el control remoto de un vehículo, del 12 de Marzo de 2019, de SIEMENS S.A.S: Método para asegurar la transmisión a distancia de la imagen de un objeto diseñado para ser captado por un receptor fotosensible de una cámara […]