Cápsula endoscópica teleoperada equipada con un sistema locomotor activo.
Una cápsula endoscópica teleoperada con fines diagnósticos y terapéuticos dentro de una cavidad del cuerpohumano,
que comprende un cuerpo (1) con una pluralidad de módulos de locomoción (5) colocados sobre susuperficie, adecuados para mover dicho cuerpo en dicha cavidad, una fuente de energía dentro de dicho cuerpo, unmicrocontrolador (μP) en dicho cuerpo (1) para accionar dichos módulos de locomoción (5) en base a los comandosteletransmitidos por un operador, una videocámara para capturar imágenes, controlada por dicho microcontrolador(μP), un sistema transmisor / receptor para recibir los comandos teletransmitidos por el operador y para transmitir lasimágenes capturadas a través de dicha videocámara,
comprendiendo cada uno de dichos módulos de locomoción (5) una pata (6) adecuada para ser llevada hastacontactar con la pared de dicha cavidad para transmitir la fuerza de locomoción y mover los puntos de contacto conella para producir locomoción, teniendo dicha pata al menos dos grados de libertad, y medios (7) para accionar elmovimiento de dicha pata controlado por dicho microcontrolador (μP), caracterizada porque dicha pata (6)comprende medios de agarre (18, 19) para incrementar la adherencia del contacto contra dicha pared, teniendodichos medios de agarre una pluralidad de microganchos (19) alineados a lo largo del extremo alargado (18) dedicha pata (6), estando dichos microganchos (19) doblados hacia dicho extremo posterior de dicho cuerpo (1) yademás extendiéndose a lo largo de un borde de dicha pata.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2005/000398.
Solicitante: KOREA INSTITUTE OF SCIENCE AND TECHNOLOGY.
Nacionalidad solicitante: República de Corea.
Dirección: 39-1, HAWOLGOK-DONG, SEONGBUK-GU SEOUL 136-791 REPUBLICA DE COREA.
Inventor/es: DARIO, PAOLO, Gorini,Samuele, Menciassi,Arianna, Pernorio,Giuseppe, STEFANINI,Cesare, ACCOTO,Dino.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B1/04 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 1/00 Instrumentos para proceder al examen médico de las cavidades o conductos del cuerpo por inspección visual o fotográfica, p. ej. endoscopios (examen de las cavidades o conductos del cuerpo utilizando ondas ultrasónicas, sónicas o infrasónicas A61B 8/12; instrumentos endoscópicos para la toma de muestras celulares o para biopsias A61B 10/04; con fines quirúrgicos A61B 17/00; instrumentos quirúrgicos endoscópicos A61B 17/94; instrumentos quirúrgicos que utilizan un haz láser dirigido a lo largo o a través de un conducto flexible A61B 18/22 ); Dispositivos de iluminación al efecto (para los ojos A61B 3/00). › combinados con dispositivos fotográficos o de televisión.
- A61B19/00
- A61B5/07 A61B […] › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Endorradiosondas.
PDF original: ES-2387497_T3.pdf
Fragmento de la descripción:
Cápsula endoscópica teleoperada equipada con un sistema locomotor activo.
CAMPO DE LA INVENCIÓN
La invención presente trata en general del área de dispositivos para uso endoscópico, y más específicamente trata de una cápsula endoscópica teleoperada capaz de moverse de manera autónoma en varias zonas del cuerpo humano y en particular en el tracto gastrointestinal, con un control activo de su locomoción.
DESCRIPCION DEL ESTADO DE LA TECNICA
En años recientes ha aumentado considerablemente el interés por dispositivos que permiten las investigaciones y los tratamientos endoscópicos que deben ser realizados autónomamente y de una manera mínimamente invasiva. Un sistema de visión e imagen autónomo con una transmisión de datos inalámbrica, integrado en una pequeña píldora, ha recibido recientemente la aprobación para la evaluación clínica en los Estados Unidos. El sistema comprende una cámara CMOS, un transmisor, diodos LED para la iluminación y una fuente de alimentación de baterías similares a las de los relojes. Véase por ejemplo el documento US 5604531. La principal limitación de este dispositivo consiste en la ausencia de control activo del movimiento: la cápsula avanza por el movimiento peristáltico normal y no se puede detener durante su viaje. Se conocen también soluciones semiautomáticas, basadas en un modelo de locomoción denominado de “lombriz”, como por ejemplo el dispositivo endoscópico descrito en el documento WO02/68035. Estos sistemas tienen un potencial de control limitado de los parámetros de locomoción y no tienen posibilidad de modificar su velocidad. También tienen la desventaja de rozarse con su cuerpo a lo largo de las paredes de la cavidad del cuerpo en el que se mueven sin ser capaces de esquivar cualquier herida o zona patológica.
Se conocen también dispositivos endoscópicos que son operados desde el exterior por medio de campos de fuerza (por ejemplo campos magnéticos, ) que requieren que el paciente lleve encima aparatos adecuados para la generación del campo de fuerza. Como referencia se cita por ejemplo el dispositivo conocido como Norika 3, producido por la firma japonesa RF System Lab. Sin embargo el uso de este dispositivo puede ser desagradable y peligroso, debido a la posibilidad de interferencias con otros dispositivos biomédicos que pudieran ser utilizados por el paciente. Además los dispositivos endoscópicos con operación externa de este tipo conllevan el riesgo de efectos secundarios, debido a la exposición prolongada a campos electromagnéticos.
El documento US 2.002/171385 A1 describe un dispositivo de acuerdo con el preámbulo de la reivindicación 1.
OBJETO Y SUMARIO DE LA INVENCION
El objeto de la presente invención es proporcionar un dispositivo para uso endoscópico capaz de movimiento y suministro de energía autónomos dentro de una cavidad del cuerpo, con la posibilidad de controlar su movimiento desde el exterior de manera que se permita la realización de procedimientos médicos, diagnósticos y terapéuticos, y en particular para transmitir imágenes de zonas de interés de la cavidad del cuerpo atravesada.
Otro objeto de la invención presente es proporcionar un dispositivo para uso endoscópico, del tipo mencionado más arriba, con unas dimensiones tales que sea capaz de ser tragado, y que sea adaptable al ambiente de locomoción, con la posibilidad de ser detenido, rotado, acelerado y desacelerado como se requiera como resultado de comandos tele-transmitidos desde el exterior.
Un objeto adicional de la invención presente es proporcionar un dispositivo para uso endoscópico del tipo mencionado anteriormente provisto de patas con varios grados de libertad, que se puedan extender radialmente desde el mismo, y que permiten la locomoción y la adaptación del mismo a las varias formas del área del cuerpo cubierta sin dañar el tejido con el que entran en contacto.
Además un objeto adicional de la invención presente es proporcionar un sistema para endoscopias dentro de una cavidad del cuerpo humano que permita a un operador controlar la locomoción de una cápsula endoscópica teleoperada equipada con sus propios medios de locomoción, tragada por un paciente, y la recepción de imágenes y datos adquiridos por la misma.
Estos objetos se consiguen con la cápsula endoscópica de acuerdo con la invención, cuyas características básicas se describen en la reivindicación 1. Se describen características importantes adicionales en las reivindicaciones dependientes.
De acuerdo con la invención, se provee una cápsula endoscópica teleoperada con propósitos diagnósticos y terapéuticos dentro de una cavidad del cuerpo humano, comprendiendo un cuerpo con una pluralidad de módulos de locomoción en su superficie, adecuada para moverse por el interior de la cavidad del cuerpo, una fuente de energía y un micro-controlador dentro de dicho cuerpo para accionar dichos módulos de locomoción en base a comandos teletransmitidos por un operador, una videocámara para capturar imágenes, controlada por el micro-controlador, y un sistema transmisor / receptor para recibir los comandos teletransmitidos por el operador y para transmitir las imágenes adquiridas a través de la videocámara.
En una realización particularmente preferida de la invención, la cápsula está provista con patas capaces de extenderse radialmente desde su cuerpo y teniendo al menos dos grados de libertad, del que uno es activo, para permitir su movimiento desde una posición de reposo, más en particular situados a lo largo del cuerpo de la cápsula, hasta una posición extendida radialmente, y una pasiva para doblar las patas alrededor de una parte intermedia de las mismas para adaptarlas a las deformaciones del tejido sobre el que colisionan durante el movimiento de la cápsula.
Preferiblemente, para operar el movimiento de las patas se proveen medios actuadores que consisten en hilos de aleaciones con memoria de forma (SMA) , que actúan de dos en dos sobre cada pata, en oposición uno con respecto al otro.
La cápsula está provista de patas con medios agarre, que consisten en particular en microganchos en sus extremos libres, para incrementar la fricción con el tejido resbaladizo y deformable.
BREVE DESCRIPCION DE LOS DIBUJOS
Características y ventajas adicionales de la cápsula endoscópica de acuerdo con la invención presente se aclararán mediante la descripción que sigue de una de sus realizaciones, facilitada a modo de ejemplo no limitativo, y mediante referencia a los dibujos que se acompañan en los que:
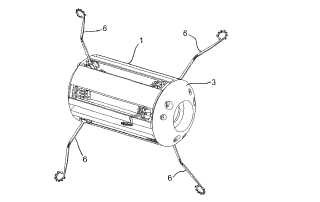
• la Figura 1 es una vista en perspectiva de una cápsula endoscópica de acuerdo con la invención;
• la Figura 2 es una vista de una sección axial agrandada de la cápsula endoscópica de la Figura 1;
• la Figura 3 es una vista en perspectiva de un módulo de locomoción de la cápsula endoscópica de la Figura 1;
• la Figura 4 es una vista en perspectiva lateral de una pata con la que está equipado el módulo de locomoción de la Figura 3;
• la Figura 5 es una variante de la pata de la Figura 4;
• la Figura 6 es un diagrama de bloques de la arquitectura mecánica y electrónica para la locomoción de la cápsula;
• la Figura 7 es un diagrama de bloques del sistema de control a bordo de la cápsula;
• la Figura 8 es un diagrama de bloques que ilustra el sistema de actuación de las patas.
DESCRIPCION DETALLADA DE LA INVENCION
En referencia a las Figuras 1 y 2, la cápsula endoscópica de acuerdo con la invención está formada por un cuerpo 1 sustancialmente cilíndrico, preferiblemente hecho de un material plástico biocompatible, que tiene un extremo frontal y un extremo posterior separados longitudinalmente, y que definen un cámara interna 2 para alojar una videocámara (no mostrada) para capturar imágenes, una fuente de alimentación eléctrica y las electrónicas de control, como se explicará más adelante. En los extremos del cuerpo 1 se fijan una tapas de cierre 3 y la tapa colocad en el extremo frontal tiene una abertura para el sistema óptico de la videocámara, para la administración de drogas y para el paso de instrumentos bio-ópticos o quirúrgicos.
A lo largo de la superficie... [Seguir leyendo]
Reivindicaciones:
1. Una cápsula endoscópica teleoperada con fines diagnósticos y terapéuticos dentro de una cavidad del cuerpo humano, que comprende un cuerpo (1) con una pluralidad de módulos de locomoción (5) colocados sobre su superficie, adecuados para mover dicho cuerpo en dicha cavidad, una fuente de energía dentro de dicho cuerpo, un microcontrolador (IP) en dicho cuerpo (1) para accionar dichos módulos de locomoción (5) en base a los comandos teletransmitidos por un operador, una videocámara para capturar imágenes, controlada por dicho microcontrolador (IP) , un sistema transmisor / receptor para recibir los comandos teletransmitidos por el operador y para transmitir las imágenes capturadas a través de dicha videocámara,
comprendiendo cada uno de dichos módulos de locomoción (5) una pata (6) adecuada para ser llevada hasta contactar con la pared de dicha cavidad para transmitir la fuerza de locomoción y mover los puntos de contacto con ella para producir locomoción, teniendo dicha pata al menos dos grados de libertad, y medios (7) para accionar el movimiento de dicha pata controlado por dicho microcontrolador (IP) , caracterizada porque dicha pata (6) comprende medios de agarre (18, 19) para incrementar la adherencia del contacto contra dicha pared, teniendo dichos medios de agarre una pluralidad de microganchos (19) alineados a lo largo del extremo alargado (18) de dicha pata (6) , estando dichos microganchos (19) doblados hacia dicho extremo posterior de dicho cuerpo (1) y además extendiéndose a lo largo de un borde de dicha pata.
2. La cápsula endoscópica de acuerdo con la reivindicación 1, en la que dicho cuerpo (1) tiene un extremo frontal y un extremo posterior separados longitudinalmente y dicha para (6) tiene al menos un grado de libertad activo en la dirección longitudinal de dicho cuerpo (1) controlado por dichos medios de accionamiento (7) .
3. La cápsula endoscópica de acuerdo con la reivindicación 2, en la que dicha pata (6) tiene al menos un grado de libertad pasivo para doblarse en una parte intermedia de la pata para adaptar la pata a las deformaciones de la pared de la cavidad durante el movimiento de la cápsula endoscópica.
4. La cápsula endoscópica de acuerdo con cualquiera de las reivindicaciones previas, en la que dicha pata (6) es sustancialmente un elemento en forma de varilla en dos partes (6a, 6b) , conectadas extremo con extremo por una parte de la rodilla (6c) con una flexibilidad incrementada.
5. La cápsula endoscópica de acuerdo con cualquiera de las reivindicaciones 1 a 3, en el que dicha pata (6) es un elemento sustancialmente con forma de varilla con una pluralidad de secciones (6c) con una flexibilidad incrementada a lo largo de la misma.
6. La cápsula endoscópica de acuerdo con cualquiera de las reivindicaciones 4, 6 ó 7, en la que dichas partes de la rodilla (6c) o secciones con flexibilidad incrementada están hechas de un material removible.
7. La cápsula endoscópica de acuerdo con cualquiera de las reivindicaciones 4, 6 ó 7, en la que dichas partes de la rodilla (6c) o secciones con flexibilidad incrementada comprenden topes de finales de carrera (25, 26) para limitar el movimiento angular en ambas direcciones.
8. La cápsula endoscópica de acuerdo con cualquiera de las reivindicaciones previas, en la que dichas patas (6) están hechas de una aleación con memoria de forma (SMA) .
9. La cápsula endoscópica de acuerdo con cualquiera de las reivindicaciones previas, en la que dichos medios de accionamiento (7) comprende un par de hilos (20, 21) en aleación con memoria de forma (SMA) conectados a dicha pata (6) y que actúan en oposición para moverla de forma angular alrededor de un eje perpendicular a la dirección longitudinal de dicho cuerpo (1) , estando dichos hilos (20, 21) alimentados eléctricamente con una corriente eléctrica bajo el control de dicho microcontrolador (IP) .
10. La cápsula endoscópica de acuerdo con la reivindicación 11, en la que dicho módulo de locomoción (5) comprende un soporte (8) alojado longitudinalmente en dicho cuerpo (1) , estando provista una polea (11) en un extremo de dicho soporte (8) , con su eje perpendicular a la dirección longitudinal de dicho cuerpo, extendiéndose dicha pata (6) radialmente desde dicha polea (11) estando dichos hilos de SMA (20, 21) conectados a dicha polea
(11) en puntos diametralmente opuestos entre sí y a contactos eléctricos (22) provistos en los extremos opuestos de dicho soporte (8) .
11. La cápsula endoscópica de acuerdo con cualquiera de las reivindicaciones previas, en la que dichos módulos de locomoción (5) están colocados uno a lo largo del otro sobre dicho cuerpo de tal manera que las patas (6) correspondientes están alternativamente en el lado del extremo frontal y del extremo posterior de dicho cuerpo (1) .
12. La cápsula endoscópica de acuerdo con cualquiera de las reivindicaciones previas, en la que dichos módulos de locomoción (5) son al menos seis.
13. La cápsula endoscópica de acuerdo con cualquiera de las reivindicaciones previas, en la que dichos medios de accionamiento (7) son adecuados para transmitir movimientos angulares a dichas patas entre la posición de reposo, en la que están colocadas longitudinalmente a lo largo de dicho cuerpo, y una posición de máxima extensión radial.
14. La cápsula endoscópica de acuerdo con al reivindicación 13, en la que en dicha posición de reposo dicha pata
(16) está alojada en dicho soporte (8) .
15. La cápsula endoscópica de acuerdo con la reivindicación 13, en la que la posición de máxima extensión radial de dicha pata está a 120 º en relación con dicha posición de reposo.
16. La cápsula endoscópica de acuerdo con cualquiera de las reivindicaciones previas, en la que se provee un recubrimiento biodegradable en dicho cuerpo para contener las patas durante el proceso de tragado.
17. El sistema para endoscopia diagnóstica y terapéutica dentro de una cavidad del cuerpo humano, caracterizada porque comprende una cápsula endoscópica de acuerdo con cualquiera de las reivindicaciones previas y una interfase de control externa para transmitir a dicha cápsula los comandos para su locomoción en dicha cavidad y
para la recepción y procesamiento de los datos obtenidos.
Pared Gastrointestinal
Sensores (cámara, 3 fuerzas
Patas Múltiples axiales, giroscopio)
Batería Microcontrolador Actuador embebido
Telemetría
Controlador Externo
Operador
Transmisor/Receptor Controlador
Sensores Sistema de visión
Fuente de Alimentación
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]