Aparato y método de clasificación del movimiento de objetos en una zona de control.
Un aparato para el control del movimiento de objetos en una región de control.
El aparato comprende lo siguiente:
- un dispositivo de detección sensible a la presencia o ausencia de un objeto en cada una de la pluralidad de zonas adyacentes en la región individualmente;
- zonas dispuestas de manera que haya al menos dos filas de zonas adyacentes en una primera dirección y al menos dos filas de zonas adyacentes en un dirección perpendicular a la primera dirección;
- cada zona está asociada a un índice de zona respectivo;
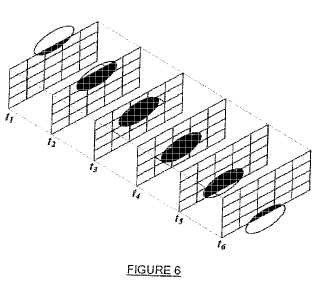
- el dispositivo de detección es capaz de capturar representaciones de forma secuencial de los objetos moviéndose a través de la región que comprenden los datos observados relativos a la presencia o ausencia de objetos en cada una de las zonas;
- un dispositivo procesador conectado al dispositivo de detección y que procese los datos obtenidos en un patrón multidimensional de la presencia o ausencia de objetos en las zonas, en el que una primera dimensión es el tiempo y una segunda dimensión es el índice de zona;
- el dispositivo procesador está configurado para segmentar el patrón en partes de patrón relacionadas con los eventos; y
- un clasificador para clasificar las partes del patrón en relación con los datos históricos relativos a los eventos anticipados.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2009/052969.
Solicitante: Nortech International (PTY) Limited.
Nacionalidad solicitante: Sudáfrica.
Dirección: 32A Wiganthorpe Road 3201 Pietermaritzburg AFRICA DEL SUR.
Inventor/es: LOUBSER,Gerrit Jacobus, HORNBY,Christopher Langton, DE WIT,Leon, NEILSON,Rory Tait, VERMEULEN,Pieter Johannes Erasmus.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06K9/00 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
PDF original: ES-2382311_T3.pdf
Fragmento de la descripción:
Aparato y método de clasificación del movimiento de objetos en una zona de control
Descripción INTRODUCCIÓN Y ANTECEDENTES DE LA TÉCNICA [0001] La presente invención hace referencia a un aparato y un método de control del movimiento de objetos en una región de control. [0002] En la US 5.519.784 se revela un aparato y un método de clasificación del movimiento de objetos a lo largo de un pasaje. El aparato contiene medios para proyectar una matriz de haces de radiación lineales paralelos diferenciados y separados desde un lado del pasaje hacia el lado opuesto. Unos detectores situados en el lado opuesto del pasaje detectan cuando los haces son interrumpidos por una o más personas moviéndose en el pasaje tanto en una primera dirección como en una segunda dirección opuesta. Los haces espaciados son interrumpidos en diferentes momentos en una secuencia que corresponde al número de personas y la dirección del movimiento de las mismas. Las señales de los haces generadas interrumpidas consecutivamente se almacenan como datos históricos del movimiento del objeto en la memoria, y a continuación son procesadas para generar patrones de interrupción del haz compuestos que manifiesten el número de personas y la dirección del movimiento, encontrándose estos patrones en función del dominio del tiempo y el índice del sensor, es decir, la identidad del sensor y la posición en el pasaje. Los patrones generados resultantes son comparados con patrones de referencia utilizando el análisis de reconocimiento de patrones computarizado, como por ejemplo con una red neuronal artificial. La comparación clasifica a las personas en el pasaje en cuanto a la dirección del movimiento y el número. [0003] Este aparato y el método pueden no ser adecuados para algunas aplicaciones. Por ejemplo, los medios de proyección de los haces paralelos separados se encuentran montados sobre una carcasa alargada. La carcasa se encuentra montada normalmente a un lado del pasaje y se extiende paralela al suelo entre la altura del tobillo y la rodilla aproximadamente. Puede que la carcasa sea demasiado grande para encajar en el espacio disponible para la misma y/o puede que no sea estéticamente aceptable en algunas aplicaciones. Además, cuesta trabajo, tiempo y dinero montar este aparato a un lado del pasaje y a menudo es necesario trabajar en las paredes laterales del pasaje para instalar cableado que vaya hasta el aparato. Y además, los medios proyectores de los haces situados a un lado y los detectores al otro lado pueden desalinearse, lo que provocaría el cese del funcionamiento del aparato. Otro problema con este aparato montado a un lado es que una persona u objeto fijo en el pasaje puede interrumpir los haces, y por tanto, causar la no detección temporal del aparato de otros objetos que se muevan por el pasaje a ambos lados del objeto fijo. Otro problema más es que el margen de haces proyectados puede no ser suficiente para atravesar un pasaje ancho. Las estructuras intermedias que contienen el aparato adicional con todas las desventajas que se han mencionado deben cubrir todo el ancho del pasaje. Otro sistema conocido, pero que es esencialmente diferente, utiliza algoritmos de seguimiento e intenta identificar objetos diferenciados y vigilar su posición entre los fotogramas sucesivos producidos por un dispositivo de detección de objetos, para determinar un vector para cada objeto de interés. El procesamiento es complejo, ya que requiere un análisis completo de cada fotograma, y después una comparación con los fotogramas anteriores para determinar si un objeto es un objeto previo en una nueva posición, o un objeto nuevo. En relación a esto, encontramos la dificultad de distinguir entre dos personas por un lado, y por otro, una persona que lleva una mochila o equipaje, por ejemplo. Aislando objetos y obteniendo sus vectores, el sistema es capaz de seguir su movimiento por una zona de control predeterminada y así incrementar o disminuir el recuento en función de ello. Cualquier incapacidad del sistema para aislar objetos, relacionar sus posiciones sucesivas o distinguir el número de objetos compromete la exactitud del sistema. Además, el análisis visual requiere un uso extremadamente intensivo del procesador y es por ello caro. [0004] Se hace referencia a la GB-A-2337146, la cual revela un sistema en el que una cámara captura, en fotogramas sucesivos, imágenes de un objeto moviéndose en una zona de vigilancia. Se correlacionan los fotogramas sucesivos para identificar las regiones de movimiento dentro de cada fotograma y evaluar los vectores de movimiento para cada región. Se destaca también la EP-A-0700017, en la que se revela un método para el recuento direccional de objetos en movimiento capaz de contar los objetos en movimientos de manera estable a la vez que determina las direcciones de paso de los objetos en movimiento de manera precisa.
OBJETO DE LA INVENCIÓN [0005] Por consiguiente, es un objetivo de la presente invención proporcionar un aparato alternativo y un método de control del movimiento de objetos a través de una región de control.
RESUMEN DE LA INVENCIÓN [0006] Según la invención, se proporciona un aparato para el control del movimiento de objetos a través de una región de control. El aparato comprende lo siguiente:
- Un dispositivo de detección sensible a la presencia o ausencia de un objeto en cada una de una pluralidad de zonas adyacentes en la región.
- Las zonas están dispuestas de forma que hay al menos dos hileras de zonas adyacentes en una primera dirección y al menos dos hileras de zonas adyacentes en una dirección perpendicular a la primera dirección;
- Cada zona está asociada a un índice de zona respectivo;
- El dispositivo de detección está configurado de manera que sea sensible a la presencia o ausencia de un objeto en cada una de las zonas individualmente y es capaz de captar representaciones secuenciales de los objetos en movimiento a través de una región que comprenden la información detectada en relación a la presencia o ausencia de objetos en cada una de las zonas;
- Un dispositivo procesador conectado al dispositivo de detección para procesar la información detectada en patrones multidimensionales de la presencia o ausencia de los objetos en las zonas, en el que una primera dimensión es el tiempo, y una segunda dimensión es el índice de zona;
- El dispositivo procesador está configurado de manera que segmenta el patrón en partes del patrón en relación con los eventos; y - Un clasificador para clasificar las partes de los patrones en referencia a los datos históricos relacionados con los eventos anticipados. [0007] El dispositivo de detección puede contener al menos una cámara, que se monta en los alto de la zona de control. [0008] El dispositivo de detección puede comprender un par estéreo de cámaras que cubra la región desde diferentes ángulos. [0009] Por tanto, el sistema según la invención no trata de identificar cada objeto único en el campo de visión, sino que analiza un evento y comparándolo con la información previa de las características del evento, es capaz de dar una cifra de recuento utilizando un clasificador, que puede comprender una red neuronal. El procesamiento de la imagen es relativamente sencillo y puede realizarse de un modo relativamente barato, mientras que la propia red neuronal puede ejecutarse en un microprocesador relativamente simple, ahorrando así en costes. Se cree que el sistema también puede paliar al menos algunos de los problemas arriba mencionados asociados con el sistema montado a un lado de la US 5.519.784. [0010] La pluralidad de zonas puede formar una matriz de zonas inmediatamente adyacentes y cada zona puede tener una primera dimensión en la primera dirección y una segunda dimensión en la segunda dirección y un área.
La información detectada puede comprender datos o un parámetro proporcional a la parte del área de la zona que está siendo ocupada por el objeto. [0012] El dispositivo procesador puede configurarse para segmentar el patrón a lo largo de la dimensión del tiempo, en regiones del patrón de inactividad. [0013] Según otro aspecto de la invención, se proporciona un método de control del movimiento de los objetos a través de una región de control. Dicho método comprende las siguientes etapas:
- Dividir la región en una pluralidad de zonas, estando cada zona asociada a un índice de zona;
- se disponen las zonas de forma que haya al menos dos filas de zonas adyacentes en una primera dirección y al menos dos filas de zonas adyacentes en una dirección perpendicular a la primera dirección;
- utilizar un dispositivo... [Seguir leyendo]
Reivindicaciones:
1. Un aparato para el control del movimiento de objetos en una región de control. El aparato comprende lo siguiente: - un dispositivo de detección sensible a la presencia o ausencia de un objeto en cada una de la pluralidad de zonas adyacentes en la región individualmente; - zonas dispuestas de manera que haya al menos dos filas de zonas adyacentes en una primera dirección y al menos dos filas de zonas adyacentes en un dirección perpendicular a la primera dirección; - cada zona está asociada a un índice de zona respectivo; - el dispositivo de detección es capaz de capturar representaciones de forma secuencial de los objetos moviéndose a través de la región que comprenden los datos observados relativos a la presencia o ausencia de objetos en cada una de las zonas;
- un dispositivo procesador conectado al dispositivo de detección y que procese los datos obtenidos en un patrón multidimensional de la presencia o ausencia de objetos en las zonas, en el que una primera dimensión es el tiempo y una segunda dimensión es el índice de zona; - el dispositivo procesador está configurado para segmentar el patrón en partes de patrón relacionadas con los eventos; y - un clasificador para clasificar las partes del patrón en relación con los datos históricos relativos a los eventos anticipados.
2. El aparato de la reivindicación 1, en el que el dispositivo de detección comprende al menos una cámara que se monta en lo alto de la región de control.
3. El aparato de la reivindicación 1 o 2, en el que el dispositivo de detección comprende un par estéreo de cámaras que cubren la región desde ángulos diferentes.
4. El aparato de cualquiera de las reivindicaciones de la 1 a la 3, en el que la pluralidad de zonas forman una matriz de zonas inmediatamente adyacentes y en el que cada zona tiene una primera dimensión en la primera dirección, una segunda dimensión en una segunda dirección y un área.
5. El aparato de la reivindicación 4, en el que los datos obtenidos comprenden un parámetro proporcional a la parte del área de la zona que está siendo ocupada por el objeto.
6. El aparato de cualquiera de las reivindicaciones de la 1 a la 5, en el que el procesador se configura para segmentar el patrón a lo largo de la dimensión del tiempo, en regiones del patrón de inactividad.
7. Un método de control del movimiento de objetos a través de una región de control. El método comprende los siguientes pasos: - dividir la región en una pluralidad de zonas, con cada zona asociada a un índice de zona; - disponer las zonas de tal forma que haya al menos dos filas de zonas adyacentes en una primera dirección y al menos dos filas de zonas adyacentes en una dirección perpendicular a la primera dirección; - utilizar un dispositivo sensor automáticamente y de manera secuencial para detectar la presencia o ausencia de objetos en cada una de las zonas individualmente; - generar datos relativos al patrón multidimensional de la presencia o ausencia de los objetos en las zonas, en el que una primera dimensión es el tiempo y una segunda dimensión es el índice de zona;
- segmentar el patrón en partes de patrón relacionadas con los eventos; y - clasificar las partes de patrón en relación a los datos históricos relacionados con los eventos anticipados.
8. Un soporte legible por ordenador que contenga un programa de ordenador para el control del movimiento de objetos a través de una región de control. El programa lleva a cabo los siguientes pasos: - recibir desde un dispositivo sensor los datos obtenidos en relación con las representaciones secuenciales de objetos en movimiento a través de la región, comprendiendo los datos obtenidos información relativa a la presencia o ausencia de objetos en cada una de la pluralidad de zonas, estando las zonas dispuestas de manera que haya al menos dos filas de zonas adyacentes en una primera dirección y al menos dos filas de zonas adyacentes en una dirección perpendicular a la primera dirección y en el que cada zona está asociada a un índice de zona; - generar datos relativos al patrón multidimensional de la presencia o ausencia de los objetos en las zonas, en el que una primera dimensión es el tiempo y una segunda dimensión es el índice de zona;
- segmentar el patrón en partes de patrón relacionadas con los eventos; y - clasificar las partes de patrón en relación con los datos históricos relativos a los eventos anticipados, de ese modo, en uso, proporcionar una salida, el recuento de objetos en movimiento en al menos una dirección a través de la región.
9. Un firmware que alberga un programa de ordenador para el control del movimiento de los objetos a través de una zona de control, llevando a cabo el programa los siguientes pasos: - recibir desde un dispositivo sensor los datos obtenidos en relación con las representaciones secuenciales de objetos en movimiento a través de la región, comprendiendo los datos obtenidos información relativa a la presencia o ausencia de objetos en cada una de la pluralidad de zonas, estando las zonas dispuestas de manera que haya al menos dos filas de zonas adyacentes en una primera dirección y al menos dos filas de zonas adyacentes en una dirección perpendicular a la primera dirección y en el que cada zona está asociada a un índice de zona; - generar datos relativos al patrón multidimensional de la presencia o ausencia de los objetos en las zonas, en el que una primera dimensión es el tiempo y una segunda dimensión es el índice de zona; - segmentar el patrón en partes de patrón relacionadas con los eventos; y - clasificar las partes de patrón en relación con los datos históricos relativos a los eventos anticipados, de ese modo, en uso, proporcionar una salida, el recuento de objetos en movimiento en al menos una dirección a través de la región.
10. Un programa de ordenador para el control del movimiento de los objetos a través de una región de control, llevando a cabo el programa los siguientes pasos: - recibir desde un dispositivo sensor los datos obtenidos en relación con las representaciones secuenciales de objetos en movimiento a través de la región, comprendiendo los datos obtenidos información relativa a la presencia o ausencia de objetos en cada una de la pluralidad de zonas, estando las zonas dispuestas de manera que haya al menos dos filas de zonas adyacentes en una primera dirección y al menos dos filas de zonas adyacentes en una dirección perpendicular a la primera dirección y en el que cada zona está asociada a un índice de zona; - generar datos relativos al patrón multidimensional de la presencia o ausencia de los objetos en las zonas, en el que una primera dimensión es el tiempo y una segunda dimensión es el índice de zona;
- segmentar el patrón en partes de patrón relacionadas con los eventos; y - clasificar las partes de patrón en relación con los datos históricos relativos a los eventos anticipados, de ese modo, en uso, proporcionar una salida, el recuento de objetos en movimiento en al menos una dirección a través de la región.
Patentes similares o relacionadas:
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Estimación de una postura basada en la silueta, del 24 de Junio de 2020, de VIZRT AG: Un método implementado por ordenador para estimar una postura de un modelo de objeto articulado , en el que el modelo de objeto articulado […]