Aparato de copiado, aparato de detección de defectos ultrasónico y método.
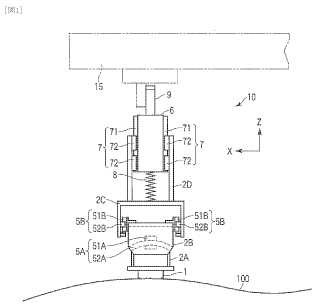
Aparato (10) de copiado para copiar una pieza (100) de trabajo,
que comprende:
una zapata (1) prevista para entrar en contacto con una parte 5 de la pieza (100) de trabajo que va a copiarse;
primeros medios (2A, 5A) de basculación para bascular con la zapata (1) en un patrón de arco con respecto a unpunto, como centro (0) de basculación, en un plano en el que la zapata (1) entra en contacto con la parte de la pieza(100) de trabajo que va a copiarse;
segundos medios (2B, 5B) de basculación para bascular con la zapata (1) en un patrón de arco con respecto alcentro (0) de basculación de los primeros medios (2A, 5A) de basculación en una dirección ortogonal a una direccióna lo largo de la cual la zapata (1) se hace bascular con los primeros medios (2A, 5A) de basculación; y
medios (6, 7) de deslizamiento en traslación para deslizar linealmente la zapata (1) en una dirección en la que lazapata (1) se presiona contra la parte de la pieza (100) de trabajo que va a copiarse.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2008/068898.
Solicitante: KABUSHIKI KAISHA TOSHIBA.
Nacionalidad solicitante: Japón.
Dirección: 1-1 SHIBAURA 1-CHOME MINATO-KU TOKYO 105-8001 JAPON.
Inventor/es: IKEDA, TAKAHIRO, MARUYAMA,KENSUKE, YAMAGUCHI,OSAMU, SHIMANUKI,TAKASHI, TSUJI,KOICHI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q35/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › Sistemas o dispositivos de control para el copiado directo a partir de un modelo o de una plantilla; Dispositivos para el copiado manual.
- G01N29/26 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 29/00 Investigación o análisis de materiales por el empleo de ondas ultrasonoras, sonoras o infrasonoras; Visualización del interior de objetos por transmisión de ondas ultrasonoras o sonoras a través del objeto (G01N 3/00 - G01N 27/00 tienen prioridad). › Disposiciones para la orientación o el barrido.
PDF original: ES-2389979_T3.pdf
Fragmento de la descripción:
Aparato de copiado, aparato de detección de defectos ultrasónico y método.
Campo técnico
La presente invención se refiere a un aparato de copiado que copia una forma de una pieza de trabajo.
Técnica anterior
En general, en el campo de, por ejemplo, la inspección, la medición o el mecanizado, se usa un aparato de copiado que copia una superficie. Por ejemplo, se proporciona un aparato de detección de defectos ultrasónico que se mueve hacia arriba y hacia abajo a lo largo de una forma superficial de una muestra de prueba para de ese modo moverse hacia arriba y hacia abajo a lo largo de una forma superficial de una muestra cuando se proporciona la muestra de prueba que simula la forma superficial de la muestra (véase, por ejemplo, la publicación KOKAI de solicitud de patente japonesa n.º 6-242087) .
Sin embargo, el aparato de copiado descrito anteriormente debe captar una forma de una pieza de trabajo objetivo por adelantado y debe hacerse la preparación para una parte de cada pieza de trabajo que va a copiarse. Por tanto, en un aparato de copiado de este tipo, dado que una parte que va a copiarse depende de una forma de una pieza de trabajo, la pieza de trabajo no puede cambiarse libremente.
El documento JP 61-096453A da a conocer un instrumento de inspección para inspecciones con ondas ultrasónicas. Se fija una sonda ultrasónica en una montura y tiene una zapata que puede realizar un movimiento oscilante con respecto a un punto central en el que se hacen incidir las ondas ultrasónicas. La montura está alojada en una guía de basculación arqueada de manera que el punto central en el que se hacen incidir las ondas ultrasónicas está ubicado en el centro del movimiento de basculación de la montura soportada en la guía de basculación.
Descripción de la invención
Un objeto de la presente invención es proporcionar un aparato de copiado con un alto valor adaptativo con respecto a una forma de una pieza de trabajo.
Según la presente invención se proporciona un aparato de copiado para copiar una pieza de trabajo según la reivindicación 1, un aparato de detección de defectos ultrasónico que incluye un aparato de copiado de este tipo y un método de detección de defectos ultrasónico que usa un aparato de detección de defectos ultrasónico de este tipo.
Realizaciones preferidas se definen en las reivindicaciones dependientes.
Breve descripción de los dibujos
La figura 1 es una vista frontal que muestra una configuración de un aparato de copiado según una primera realización de la presente invención;
la figura 2 es una vista lateral que muestra una configuración del aparato de copiado según la primera realización de la presente invención;
la figura 3 es un diagrama de bloques que muestra el movimiento de una zapata en el aparato de copiado según la primera realización de la presente invención;
la figura 4 es un diagrama de bloques que muestra una operación de copiado del aparato de copiado según la primera realización de la presente invención;
la figura 5 es un diagrama de bloques que muestra una configuración de un aparato de copiado según una segunda realización de la presente invención;
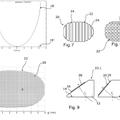
la figura 6 es un diagrama de bloques que muestra una configuración de un aparato de copiado según una tercera realización de la presente invención;
la figura 7 es un diagrama de bloques que muestra la configuración del aparato de copiado según la tercera realización de la presente invención;
la figura 8A es una vista frontal que muestra una configuración de un aparato de copiado según una cuarta realización de la presente invención;
la figura 8B es una vista ampliada que muestra un estado antes de hacer funcionar un freno del aparato de copiado según la cuarta realización de la presente invención;
la figura 8C es una vista ampliada que muestra un estado antes de hacer funcionar el freno del aparato de copiado según la cuarta realización de la presente invención;
la figura 9 es una vista lateral que muestra una configuración del aparato de copiado según la cuarta realización de la presente invención;
la figura 10A es un diagrama de estado que muestra un estado durante una operación regular del aparato de copiado según la cuarta realización de la presente invención;
la figura 10B es un diagrama de estado que muestra un estado inmediatamente antes de que el aparato de copiado según la cuarta realización de la presente invención alcance un extremo de una pieza de trabajo;
la figura 10C es un diagrama de estado que muestra un estado en el que el aparato de copiado según la cuarta realización de la presente invención está pasando por el extremo de la pieza de trabajo;
la figura 11 es un diagrama de estado que muestra un estado en el que no se hace funcionar un freno del aparato de copiado según la cuarta realización de la presente invención;
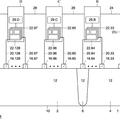
la figura 12A es un diagrama de estado que muestra un estado durante una operación regular de un aparato de copiado según una quinta realización de la presente invención;
la figura 12B es un diagrama de estado que muestra un estado en el que un sensor del aparato de copiado según la quinta realización de la presente invención no ha detectado ninguna pieza de trabajo;
la figura 12C es un diagrama de estado que muestra un estado cuando el aparato de copiado según la quinta realización de la presente invención está pasando por un extremo de una pieza de trabajo;
la figura 13 es una vista frontal que muestra una configuración de un aparato de copiado según una sexta realización de la presente invención;
la figura 14 es una vista lateral que muestra la configuración del aparato de copiado según la sexta realización de la presente invención;
la figura 15 es una vista frontal que muestra una configuración de un aparato de copiado según una modificación de la sexta realización de la presente invención;
la figura 16 es una vista frontal que muestra una configuración de un aparato de copiado según una séptima realización de la presente invención;
la figura 17 es una vista frontal que muestra una configuración de un aparato de copiado según una octava realización de la presente invención;
la figura 18A es un diagrama de estado que muestra un estado antes de que un aparato de copiado según una novena realización de la presente invención copie una pieza de trabajo;
la figura 18B es un diagrama de estado que muestra un estado después de que el aparato de copiado según la novena realización de la presente invención haya copiado la pieza de trabajo;
la figura 19 es una vista frontal que muestra una configuración de un aparato de copiado según a 10ª realización de la presente invención;
la figura 20 es una vista esquemática que muestra un método de detección de defectos realizado por el aparato de copiado según la 10ª realización de la presente invención en un plano X-Z;
la figura 21 es una vista esquemática que muestra el método de detección de defectos para una pieza de trabajo realizado por el aparato de copiado según la 10ª realización de la presente invención;
la figura 22A es un diagrama de estado que muestra un estado de una primera etapa de copiar una pieza de trabajo
mediante el aparato de copiado según la 10ª realización de la presente invención;
la figura 22B es un diagrama de estado que muestra un estado de una segunda etapa de copiar la pieza de trabajo mediante el aparato de copiado según la 10ª realización de la presente invención; la figura 22C es un diagrama de estado que muestra un estado de una tercera etapa de copiar la pieza de trabajo
mediante el aparato de copiado según la 10ª realización de la presente invención;
la figura 22D es un diagrama de estado que muestra un estado de una cuarta etapa de copiar la pieza de trabajo mediante el aparato de copiado según la 10ª realización de la presente invención; la figura 23A es un diagrama de estado que muestra un estado durante una... [Seguir leyendo]
Reivindicaciones:
1. Aparato (10) de copiado para copiar una pieza (100) de trabajo, que comprende: una zapata (1) prevista para entrar en contacto con una parte de la pieza (100) de trabajo que va a copiarse; primeros medios (2A, 5A) de basculación para bascular con la zapata (1) en un patrón de arco con respecto a un
punto, como centro (0) de basculación, en un plano en el que la zapata (1) entra en contacto con la parte de la pieza
(100) de trabajo que va a copiarse;
segundos medios (2B, 5B) de basculación para bascular con la zapata (1) en un patrón de arco con respecto al centro (0) de basculación de los primeros medios (2A, 5A) de basculación en una dirección ortogonal a una dirección a lo largo de la cual la zapata (1) se hace bascular con los primeros medios (2A, 5A) de basculación; y
medios (6, 7) de deslizamiento en traslación para deslizar linealmente la zapata (1) en una dirección en la que la zapata (1) se presiona contra la parte de la pieza (100) de trabajo que va a copiarse.
2. Aparato (10) según la reivindicación 1, caracterizado porque comprende además:
medios (8; 20) de amortiguación para amortiguar una fuerza de presión en la dirección del movimiento deslizante de los medios (6, 7) de deslizamiento en traslación.
3. Aparato (10) según la reivindicación 2, caracterizado porque los medios de amortiguación son medios (20) de amortiguación mediante presión de aire para realizar la amortiguación usando una presión de aire, y el aparato comprende además medios (23) de ajuste de presión de aire para ajustar la presión de aire de los medios (20) de amortiguación mediante presión de aire.
4. Aparato (10) según la reivindicación 3, caracterizado porque los medios (23) de ajuste de presión de aire están adaptados para ajustar la presión de aire de los medios (20) de amortiguación mediante presión de aire en una dirección en la que la zapata (1) presiona contra la parte de la pieza (100) de trabajo que va a copiarse.
5. Aparato (10) según la reivindicación 3, caracterizado porque los medios (23) de ajuste de presión de aire están adaptados para ajustar la presión de aire de los medios (20) de amortiguación mediante presión de aire en una dirección en la que se reduce el peso del aparato de copiado.
6. Aparato (10) según la reivindicación 1, caracterizado porque comprende además:
primeros medios (25A) de frenado para frenar la basculación de la zapata (1) mediante los primeros medios (2A, 5A) de basculación; y
segundos medios (25B) de frenado para frenar la basculación de la zapata (1) mediante los segundos medios (2B, 5B) de basculación.
7. Aparato (10) según la reivindicación 6, caracterizado porque comprende además:
medios (25K; 26L; 27M) de frenado del deslizamiento en traslación para frenar el deslizamiento mediante los medios (6, 7) de deslizamiento en traslación.
8. Aparato (10) según la reivindicación 7, caracterizado porque los medios (25K) de frenado de deslizamiento en traslación comprenden:
un cilindro (251K) que funciona basándose en una presión de aire; y
una pastilla (213K) que usa una fuerza de fricción para frenar el deslizamiento de los medios (6, 7) de deslizamiento en traslación basándose en un funcionamiento del cilindro (251K) .
9. Aparato (10) según la reivindicación 7, caracterizado porque los medios (26L) de frenado de deslizamiento en traslación comprenden:
un trinquete (261L) ; y
un fiador (262L) que está dispuesto para engancharse en el trinquete (261L) y para frenar los medios (6, 7) de deslizamiento en traslación que se mueven en una dirección en la que la zapata (1) presiona contra la parte de la pieza (100) de trabajo que va a copiarse, pero no frena los medios (6, 7) de deslizamiento en traslación que se mueven en una dirección a lo largo de la cual la zapata (1) se aleja de la parte de la pieza (100) de trabajo que va a copiarse.
10. Aparato (10) según la reivindicación 7, caracterizado porque los medios (27M) de frenado de deslizamiento en traslación comprenden:
un primer engranaje (271M) ;
un segundo engranaje (272M) que se engrana con el primer engranaje (271M) ;
una rueda (274M) libre que frena los medios de deslizamiento en traslación que rotan en una dirección en la que la zapata (1) presiona contra la parte de la pieza (100) de trabajo que va a copiarse, pero no frena los medios (6, 7) de deslizamiento en traslación que rotan en una dirección en la que la zapata (1) se aleja de la parte de la pieza (100) de trabajo que va a copiarse; y
un embrague (273M) para desconectar y conectar un árbol rotatorio del segundo engranaje (272M) y un árbol rotatorio de la rueda (274M) libre.
11. Aparato (10) según la reivindicación 7, caracterizado porque:
los medios (26L; 27M) de frenado de deslizamiento en traslación están adaptados para frenar los medios (6, 7) de deslizamiento en traslación que se mueven en una dirección en la que la zapata (1) presiona contra la parte de la pieza (100) de trabajo que va a copiarse, pero no frena los medios (6, 7) de deslizamiento en traslación que se mueven en una dirección en la que la zapata (1) se aleja de la parte de la pieza (100) de trabajo que va a copiarse.
12. Aparato (10) según una cualquiera de las reivindicaciones 1 a 11, caracterizado porque comprende además:
medios de corrección para corregir una influencia de basculación de los primeros medios (2A, 5A) de basculación debido a la fuerza de la gravedad usando un contrapeso (36) .
13. Aparato (10) según una cualquiera de las reivindicaciones 1 a 12, caracterizado porque comprende además:
medios (31) de medición de distancia para medir una distancia que la parte de la pieza (100) de trabajo que va a copiarse se desplaza en la dirección en la que la zapata (1) presiona contra la parte de la pieza (100) de trabajo que va a copiarse.
14. Aparato (10) según una cualquiera de las reivindicaciones 1 a 13, caracterizado porque comprende además:
medios (81N, 82N, 83N) de medición de ángulo para medir un ángulo con el que está inclinado la zapata (1) .
15. Aparato (10) según una cualquiera de las reivindicaciones 1 a 14, caracterizado porque comprende además:
un sensor (30) previsto en un lado en la dirección de desplazamiento para la operación de copiado alejado de la zapata (1) y configurado para detectar una parte de extremo o un borde de la pieza (100) de trabajo que va a copiarse;
en el que, cuando el sensor (30) detecta un estado en el que la pieza (100) de trabajo que va a copiarse como objetivo de medición no está presente, un dispositivo de control emite una señal que se usa para hacer funcionar los primeros medios (25A) de frenado o los segundos medios (25B) de frenado.
16. Aparato de detección de defectos ultrasónico caracterizado porque comprende:
el aparato (10) de copiado según una cualquiera de las reivindicaciones 1 a 15; y
un detector (90) de defectos ultrasónico que se proporciona a la zapata (1) para generar ultrasonidos hacia la parte de la pieza (100) de trabajo que va a copiarse, detectando de ese modo defectos.
17. Aparato (10) según la reivindicación 16, caracterizado porque comprende además:
una unidad móvil (VH) en la que está montado el aparato (10) y que puede moverse hasta una posición arbitraria en el suelo.
18. Método de detección de defectos ultrasónico para realizar la detección de defectos con respecto a la parte de la pieza (100) de trabajo que va a copiarse usando el aparato de detección de defectos ultrasónico según la reivindicación 16, estando el método caracterizado porque comprende hacer rotar la pieza (100) de trabajo para detectar defectos.
Patentes similares o relacionadas:
Métodos para realizar tareas en un tanque que contiene sustancias peligrosas, del 5 de Febrero de 2020, de Tankbots, Inc: Un método para realizar una tarea seleccionada en un tanque al menos parcialmente lleno de una sustancia energética ; caracterizado el método por: - dimensionar […]
 Método de fabricación de una sonda de ensayo y un dispositivo de ensayo para el ensayo ultrasónico no destructivo de una pieza de trabajo, del 25 de Septiembre de 2019, de GE SENSING & INSPECTION TECHNOLOGIES GMBH: Método de fabricación de una sonda de ensayo para el ensayo ultrasónico no destructivo de una pieza de trabajo dada, en donde la sonda […]
Método de fabricación de una sonda de ensayo y un dispositivo de ensayo para el ensayo ultrasónico no destructivo de una pieza de trabajo, del 25 de Septiembre de 2019, de GE SENSING & INSPECTION TECHNOLOGIES GMBH: Método de fabricación de una sonda de ensayo para el ensayo ultrasónico no destructivo de una pieza de trabajo dada, en donde la sonda […]
Procedimiento para el examen acústico de la via de rodadura de un rodamiento de gran tamaño, del 4 de Septiembre de 2019, de NORDEX ENERGY GMBH: Procedimiento para el examen de la vía de rodadura de un rodamiento de gran tamaño en una instalación de energía eólica, que presenta […]
 Método y sistema para examinar el material interior de un objeto, tal como una tubería o un cuerpo humano, desde una superficie del objeto mediante el uso de ultrasonido, del 28 de Agosto de 2019, de Röntgen Technische Dienst B.V: Un método para examinar el material interior de un objeto desde una superficie de un objeto mediante el uso de ultrasonido […]
Método y sistema para examinar el material interior de un objeto, tal como una tubería o un cuerpo humano, desde una superficie del objeto mediante el uso de ultrasonido, del 28 de Agosto de 2019, de Röntgen Technische Dienst B.V: Un método para examinar el material interior de un objeto desde una superficie de un objeto mediante el uso de ultrasonido […]
Detector de defectos ultrasónico y método de detección ultrasónica de defectos para objetos que tienen una forma superficial compleja, del 21 de Agosto de 2019, de KABUSHIKI KAISHA TOSHIBA: Un detector de defectos ultrasónico que comprende: una sonda ultrasónica que comprende una pluralidad de elementos ultrasónicos y configurada para emitir […]
Dispositivo de sondeo de múltiples sensores ultrasónicos y su procedimiento de fabricación, método de controlar tal dispositivo y programa de ordenador correspondiente, del 8 de Mayo de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Dispositivo de sondeo por ultrasonidos (10') que comprende: • un alojamiento , • medios (22, 26A) para determinar una ley de […]
Procedimiento de tratamiento de señales procedentes de una adquisición por sondeo ultrasónico, programa de ordenador y dispositivo de sondeo de ultrasonidos correspondientes, del 8 de Marzo de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Procedimiento para el tratamiento de señales ultrasónicas (S) resultantes de una adquisición mediante sondeo ultrasónico que comprende las etapas siguientes: […]
Dispositivo de prueba por ultrasonidos de álabe de turbina y procedimiento de prueba del mismo, del 20 de Febrero de 2019, de KABUSHIKI KAISHA TOSHIBA: Un dispositivo de prueba de un álabe de turbina que comprende: un medio elástico no compresivo puesto en contacto cercano […]