Actuador electromecánico lineal.
Actuador electromecanico lineal, que comprende:
- una estructura de cubierta (2);
- un primer elemento (6), montado en la estructura de cubierta (2) y giratorio alrededor de un eje de rotación principal (X), pudiendo dicho primer elemento (6) ser conectado a un motor electrico para recibir un par motor;
- un segundo elemento (8), montado en la estructura de cubierta (2) a lo largo de dicho eje de rotación principal (X) y acoplado con libertad de rotación al primer elemento (6) por enroscado para recibir un movimiento de avance a lo largo de dicho eje de rotación principal (X) como consecuencia de una rotación del primer elemento (6), definiendo dicho segundo elemento (8) un elemento de traslación de dicho actuador;
en el que dicho segundo elemento (8) puede girar tambien con respecto a la estructura de cubierta (2) alrededor de dicho eje de rotación principal (X), comprendiendo ademas dicho actuador (1) medios de accionamiento (10), activos al menos sobre dicho segundo elemento (8) para determinar una velocidad de rotación del segundo elemento (8) alrededor de dicho eje de rotación principal (X) de maneraque determina la velocidad de avance del segundo elemento (8) a lo largo de dicho eje de rotación principal (X);
en el que dichos medios de accionamiento (10) comprenden un mecanismo de engranajes montado en la estructura de cubierta (2) e intercalado entre el primer y el segundo elementos (6 y 8), y
en el que dicho mecanismo de engranajes comprende un primer órgano dentado (11) y un segundo órgano dentado (12), estando dicho primer órgano dentado (11) vinculado por engranado con dicho primer elemento (6), estando dicho segundo órgano dentado (12) fijado al segundo elemento (8) y estando vinculado por engranado con dicho primer órgano dentado (11),
estando el actuador caracterizado por el hecho que dicho primer órgano dentado (11) tiene un dentado externo uniforme que posee una extensión, a lo largo del eje de rotación principal (X), tal que queda recfprocamente engranado con el primer órgano dentado (11) y con el segundo órgano dentado (12) durante el desplazamiento del segundo elemento (8) a lo largo del eje de rotación principal (X) .
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08425179.
Solicitante: UMBRA CUSCINETTI S.P.A..
Nacionalidad solicitante: Italia.
Dirección: ZONA INDUSTRIALE PACIANA 06034 FOLIGNO ITALIA.
Inventor/es: PIZZONI, LUCIANO, PERNI, FEDERICO, Speziali,Stefano, Lampart,Bjorn Hendrik.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16D65/14 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16D ACOPLAMIENTOS PARA LA TRANSMISION DE MOVIMIENTOS DE ROTACION (transmisión para transmitir la rotación F16H, p. ej. transmisiones por fluidos F16H 39/00 - F16H 47/00 ); EMBRAGUES (embragues dinamo-eléctricos H02K 49/00; embragues que utilizan atracción electrostática H02N 13/00 ); FRENOS (sistemas de frenado electrodinámicos para vehículos, en general B60L 7/00; frenos dinamoeléctricos H02K 49/00). › F16D 65/00 Elementos constitutivos o detalles de frenos. › Mecanismos de accionamiento para frenos; Medios para iniciar la operación de frenado en una posición predeterminada (sistemas de control de frenos, sus elementos B60T).
- F16H25/20 F16 […] › F16H TRANSMISIONES. › F16H 25/00 Transmisiones que implican esencialmente y únicamente sistemas de leva y ruleta o mecanismos de tornillo y tuerca. › Mecanismos de tornillo (con inversión automática F16H 25/12).
- F16H25/22 F16H 25/00 […] › con bolas, rodillos u órganos similares entre piezas que funcionan en conjugación; Elementos esenciales para utilización de estos órganos.
PDF original: ES-2383015_T3.pdf
Fragmento de la descripción:
Actuador electromecanico lineal
La presente invención se refiere a un actuador electromecanico lineal.
Mas exactamente, la presente invención se refiere a un actuador electromecanico lineal destinado a ejercer una 5 elevada acción axial y el mismo halla aplicación específica en el sector de sistemas de frenado de vehículos y en la industria aeroespacial.
Los actuadores electromecanicos lineales que se conocen en la actualidad comprenden un motor electrico conectado, a traves de una transmisión tornillo-tuerca, a un empujador capaz de trasladarse a lo largo de su propio eje que constituye el órgano activo del actuador y que, en el caso de aplicación en una unidad de frenado, define el elemento de presión en el cual esta instalada la pastilla de freno.
Puesto que el requisito principal del actuador es que dicho empujador deba ejercer una fuerza muy elevada con un recorrido muy corto, es necesario proporcionar una etapa de reducción entre el motor y el empujador para multiplicar el par de torsión desde el motor al empujador, con una correspondiente reducción de la velocidad de rotación. A menos que sea reducida, la velocidad de rotación de motores electricos tradicionales podría provocar una excesiva velocidad de traslación y un excesivo recorrido del empujador, así como un empuje insuficiente, conduciendo a una condición operativa incompatible con la aplicación prevista.
En actuadores conocidos esta etapa de reducción se obtiene por medio de trenes de engranajes, transmisiones por correa o conjuntos de engranajes epicicloidales, estos ultimos dispuestos en multiples etapas consecutivas de acuerdo con la relación de reducción general a obtener, y generalmente son empleados en la configuración con rueda interna central conectada al motor, y portaengranajes planetarios conectados al tornillo o a la tuerca del actuador. Esta configuración permite la mayor relación de reducción posible.
Algunos ejemplos de realizaciones de actuadores electromecanicos lineales son empleados en la patente estadounidense US 4.850.457, que da a conocer una pinza de freno accionada por un actuador electromecanico lineal de conformidad con la descripción anterior, y en la patente estadounidense US 6.412.610, que ilustra la presencia de dos etapas consecutivas de reducción obtenidas por medio de mecanismos de engranajes epicicloidales coaxiales. En ambos casos, el acoplamiento tornillo-tuerca es del tipo husillo con bolas circulantes.
Otros ejemplos de actuadores electromecanicos lineales han sido dados a conocer en los documentos US 5.865.272, EP 1.589.258, GB 2.272.205 y DE 19.719.510 A1.
Los actuadores electromecanicos lineales presentan algunos inconvenientes de consideración.
El empleo de conjuntos de engranajes epicicloidales dispuestos en sucesión determina un gran volumen, lo cual impide la instalación del actuador en situaciones en las cuales el espacio a disposición es muy reducido, tales como, por ejemplo, en pinzas de freno para motocicletas. Tal instalación podría resultar posible sólo con una reducción de las dimensiones del actuador, por ende subdimensionando la etapa de reducción, pero esto podría provocar una inadecuada prestación del actuador, el cual, de este modo, no podría cumplir con su cometido.
Ademas, la adopción de conjuntos de engranajes epicicloidales aumenta notablemente la complejidad del actuador y, por consiguiente, sus costos de producción.
Un cometido tecnico de la presente invención es el de poner a disposición un actuador electromecanico que este exento de los inconvenientes mencionados con anterioridad.
En el ambito de dicho cometido, el objetivo principal de la presente invención es el de poner a disposición un actuador electromecanico lineal que sea capaz de ejercer un elevado empuje axial y que al mismo tiempo presente un volumen reducido.
Otro objetivo de la presente invención es el de poner a disposición un actuador electromecanico lineal que sea simple y económico de fabricar.
Tales objetivos así como otros, que se pondran de manifiesto a continuación en la presente descripción, se logran 45 substancialmente mediante un actuador electromecanico con las caracterfsticas expuestas en la reivindicación 1 y/o en una o mas de las reivindicaciones que dependen de ella.
A continuación se proporciona una descripción, a tftulo puramente ejemplificador y no limitativo, de una ejecución preferente, pero no exclusiva, de un actuador electromecanico lineal de conformidad con la presente invención y con las figuras anexas, en las cuales:
50. la figura 1A muestra una vista en perspectiva de un actuador segun la presente invención de conformidad con una primera ejecución y de conformidad con una primera configuración operativa;
- la figura 1B muestra una vista en perspectiva del actuador de la figura 1 de conformidad con una segunda configuración operativa;
- la figura 2A muestra una vista en corte del actuador de la figura 1A de conformidad con la primera configuración operativa;
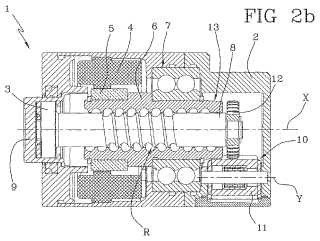
- la figura 2B muestra una vista en corte del actuador de la figura 1A de conformidad con la segunda configuración operativa;
- la figura 3A muestra una vista lateral de algunos componentes del actuador de la figura 2A de conformidad con la primera configuración operativa;
- la figura 3B muestra una vista lateral de algunos componentes del actuador de la figura 2B de conformidad con la segunda configuración operativa;
- las figuras 4A y 4B muestran vistas laterales de los componentes ilustrados en las figuras 3A y 3B respectivamente, de conformidad con una variante de ejecución;
- la figura 5 muestra una vista en perspectiva de despiece de los componentes mostrados en las figuras 3A y 3B;
- la figura 6A muestra una vista en corte de un actuador segun la presente invención, de conformidad con una segunda ejecución y de conformidad con una primera configuración operativa;
- la figura 6B muestra una vista en corte del actuador de la figura 6A de conformidad con una segunda configuración operativa;
- la figura 7A muestra una vista en corte de un actuador segun la presente invención, de conformidad con una tercera ejecución y de conformidad con una primera configuración operativa;
- la figura 7B muestra una vista en corte del actuador de la figura 7A de conformidad con una segunda configuración operativa;
- la figura 8A muestra una vista en corte de un actuador segun la presente invención, de conformidad con una cuarta ejecución y de conformidad con una primera configuración operativa;
- la figura 8B muestra una vista en corte del actuador de la figura 8A de conformidad con una segunda configuración operativa.
Haciendo referencia a las figuras anexas, la referencia numerica 1 designa un actuador electromecanico lineal, en su totalidad, segun la presente invención.
El actuador 1 comprende una estructura de revestimiento 2 que define una caja externa del mismo actuador 1 y cuya forma es cilfndrica o, mas en general, tipo caja.
La estructura de cubierta 2 tiene una abertura a traves de la cual sobresale una extremidad de un elemento móvil de translación 3, el cual es el elemento activo del actuador 1, es decir la parte del actuador 1 que sirve para intercambiar fuerzas de incluso elevada intensidad con elementos dispuestos externamente al actuador 1.
Por ejemplo, dicha extremidad del elemento móvil de translación 3 puede ser acoplada a una pastilla de freno para ejercer una fuerza de frenado sobre un freno de disco. La figura 1A muestra el actuador 1 con el elemento móvil de translación 3 retrafdo, correspondiente a una posición inactiva del actuador 1, mientras que la figura 1B muestra el actuador 1 con el elemento móvil de translación 3 parcialmente sobresaliente de la estructura de 2, correspondiente a una posición operativa del actuador 1.
Las figuras 2A y 2B muestran una primera ejecución del actuador 1. De conformidad con dichas figuras, dentro de la estructura de 2 esta alojado un motor electrico con un estator 4 y un rotor 5 capaz de girar alrededor de un eje de rotación principal "X". Preferentemente, el motor electrico es del tipo sin escobillas y es controlado por un sistema de medición angular. En el actuador 1, ademas, hay sensores de efecto Hall sensibles al campo magnetico giratorio (no mostrado en las figuras anexas) para determinar el emplazamiento del rotor 5 alrededor del eje de rotación principal "X".
El rotor del motor electrico esta acoplado directamente, por... [Seguir leyendo]
Reivindicaciones:
1. Actuador electromecanico lineal, que comprende:
- una estructura de cubierta (2) ;
- un primer elemento (6) , montado en la estructura de cubierta (2) y giratorio alrededor de un eje de rotación principal (X) , pudiendo dicho primer elemento (6) ser conectado a un motor electrico para recibir un par motor;
- un segundo elemento (8) , montado en la estructura de cubierta (2) a lo largo de dicho eje de rotación principal (X) y acoplado con libertad de rotación al primer elemento (6) por enroscado para recibir un movimiento de avance a lo largo de dicho eje de rotación principal (X) como consecuencia de una rotación del primer elemento (6) , definiendo dicho segundo elemento (8) un elemento de traslación de dicho actuador;
en el que dicho segundo elemento (8) puede girar tambien con respecto a la estructura de cubierta (2) alrededor de dicho eje de rotación principal (X) , comprendiendo ademas dicho actuador (1) medios de accionamiento (10) , activos al menos sobre dicho segundo elemento (8) para determinar una velocidad de rotación del segundo elemento (8) alrededor de dicho eje de rotación principal (X) de maneraque determina la velocidad de avance del segundo elemento (8) a lo largo de dicho eje de rotación principal (X) ;
en el que dichos medios de accionamiento (10) comprenden un mecanismo de engranajes montado en la estructura de cubierta (2) e intercalado entre el primer y el segundo elementos (6 y 8) , y en el que dicho mecanismo de engranajes comprende un primer órgano dentado (11) y un segundo órgano dentado (12) , estando dicho primer órgano dentado (11) vinculado por engranado con dicho primer elemento (6) , estando dicho segundo órgano dentado (12) fijado al segundo elemento (8) y estando vinculado por engranado con dicho primer órgano dentado (11) , estando el actuador caracterizado por el hecho que dicho primer órgano dentado (11) tiene un dentado externo uniforme que posee una extensión, a lo largo del eje de rotación principal (X) , tal que queda recfprocamente engranado con el primer órgano dentado (11) y con el segundo órgano dentado (12) durante el desplazamiento del segundo elemento (8) a lo largo del eje de rotación principal (X) .
2. Actuador segun la reivindicación 1, caracterizado por el hecho que dicho mecanismo de engranajes establece una relación de transmisión fija y distinta de uno entre el primer y el segundo elementos (6 y 8) .
3. Actuador segun la reivindicación 2, caracterizado por el hecho que dicho mecanismo de engranajes establece una relación de transmisión, entre el primer y el segundo elementos (6 y 8) , comprendida entre 2 y 72.
4. Actuador segun la reivindicación 1, caracterizado por el hecho que dicho primer órgano dentado (11) puede girar alrededor de un eje (Y) paralelo y excentrico con respecto a dicho eje de rotación principal (X) , pudiendo dicho segundo órgano dentado (12) girar alrededor de dicho eje de rotación principal (X) .
5. Actuador segun la reivindicación 4, caracterizado por el hecho que el eje de rotación (Y) del primer órgano dentado (11) es fijo.
6. Actuador segun la reivindicación 4 6 5, caracterizado por el hecho que dicho mecanismo de engranajes comprende una pluralidad de primeros órganos dentados (11) , giratorios alrededor de respectivos ejes de rotación (Y) paralelos a dicho eje de rotación principal (X) y ubicados alrededor de dicho eje de rotación principal (X) .
7. Actuador segun la reivindicación 1, caracterizado por el hecho que dicho primer elemento (6) y dicho segundo órgano dentado (12) tienen respectivos dentados que pueden vincularse por engranado con dicho primer órgano dentado (11) , presentando el dentado (13) del primer elemento (6) y el dentado del segundo órgano dentado (12) propiedades geometricas recfprocamente diferentes para obtener una velocidad de rotación diferente entre dicho primer elemento (6) y dicho segundo órgano dentado (12) .
8. Actuador segun la reivindicación 7, caracterizado por el hecho que dichas propiedades geometricas diferentes se obtienen modificando el addendum y/o el dedendum del dentado (13) del primer elemento (6) con respecto al addendum y/o al dedendum del dentado del segundo órgano dentado (12) .
9. Actuador electromecanico lineal, que comprende:
- una estructura de cubierta (2) ;
- un primer elemento (6) , montado en la estructura de cubierta (2) y giratorio alrededor de un eje de rotación principal (X) , pudiendo dicho primer elemento (6) ser conectado a un motor electrico para recibir un par motor;
- un segundo elemento (8) , montado en la estructura de cubierta (2) a lo largo de dicho eje de rotación principal (X) y acoplado con libertad de rotación al primer elemento (6) por enroscado para recibir un movimiento de avance a lo largo de dicho eje de rotación principal (X) como consecuencia de una rotación del primer elemento (6) , definiendo dicho segundo elemento (8) un elemento de traslación de dicho actuador;
en el que dicho segundo elemento (8) tambien puede girar con respecto a la estructura de cubierta (2) alrededor de dicho eje de rotación principal (X) , comprendiendo ademas dicho actuador (1) medios de accionamiento (10) , activos al menos sobre dicho segundo elemento (8) para determinar una velocidad de rotación del segundo elemento (8) alrededor de dicho eje de rotación principal (X) de maneraque determina la velocidad de avance del segundo elemento (8) a lo largo de dicho eje de rotación principal (X) ;
en el que dichos medios de accionamiento (10) comprenden un mecanismo de engranajes instalado en la estructura de cubierta (2) e intercalado entre el primer y el segundo elementos (6 y 8) , en el que dichos medios de accionamiento (10) comprenden un tercer elemento (16'; 16"; 16"') vinculado con dicho segundo elemento (8) por enroscado alrededor de dicho eje de rotación principal (X) de manera que, como consecuencia de una rotación relativa entre dicho segundo y tercer elementos (8 y 16'; 16"; 16"') , dicho segundo elemento (8) sufre un desplazamiento a lo largo de dicho eje de rotación principal (X) , determinando automaticamente, el acoplamiento simultaneo de dicho segundo elemento (8) con dichos primer y tercer elemento (6 y 16'; 16"; 16"') , una velocidad de rotación diferente del segundo elemento (8) con respecto a la velocidad de rotación del primer elemento (6) , en el que dicho tercer elemento (16') puede girar alrededor de dicho eje de rotación principal (X) , estando dicho mecanismo de engranajes intercalado entre dichos primer y tercer elementos (6, 16') para poner en rotación dicho tercer elemento (16') como consecuencia de la rotación del primer elemento (6) , en el que dicho mecanismo de engranajes pone en rotación dicho tercer elemento (16') en sentido opuesto a dicho primer elemento (6) , y en el que dichos primer y tercer elementos (6 y 16') estan fijados en respectivas partes de dicho segundo elemento (8) dispuestas en sucesión a lo largo de dicho eje de rotación principal (X) , caracterizado por el hecho que dicho segundo elemento (8) presenta un filete de rosca helicoidal vinculable con el primer y con el tercer elementos (6 y 16') y distribuido uniformemente, segun un mismo sentido de enroscado, sobre dichas partes del segundo elemento (8) .
10. Actuador segun la reivindicación 9, caracterizado por el hecho que dicho mecanismo de engranajes comprende un primer órgano dentado (11') y un segundo órgano dentado (12') giratorios alrededor de ejes (Y1 e Y2) paralelos y excentricos con respecto a dicho eje de rotación principal (X) , engranando dicho primer órgano dentado (11') con dicho primer elemento (6) , engranando dicho segundo órgano dentado (12') con dicho tercer elemento (16') y con dicho primer órgano dentado (11') .
11. Actuador segun la reivindicación 10, caracterizado por el hecho que los ejes de rotación (Y1 e Y2) de dichos primer y segundo órganos dentados (11' y 12') estan dispuestos substancialmente equidistantes de dicho eje de rotación principal (X) .
12. Actuador segun una o mas de las reivindicaciones de 9 a 12, caracterizado por el hecho que dicho mecanismo de engranajes establece una relación de transmisión fija y distinta de uno entre dichos primer (6) y tercer elementos (16') , estando dicha relación de transmisión preferentemente comprendida entre 2 y 72.
13. Actuador segun una o mas de las reivindicaciones de 9 a 13, caracterizado por el hecho que dicho tercer elemento (16') es móvil exclusivamente por rotación alrededor de dicho eje de rotación principal (X) y obtiene, junto con dichos primer y segundo elementos (6 y 8) , un cambio de velocidad de rotación de dicho primer elemento (6) con respecto a dicho segundo elemento (8) .
14. Actuador electromecanico lineal, que comprende:
- una estructura de cubierta (2) ;
- un primer elemento (6) , montado en la estructura de cubierta (2) y giratorio alrededor de un eje de rotación principal (X) , pudiendo dicho primer elemento (6) ser conectado a un motor electrico para recibir un par motor;
- un segundo elemento (8) , montado en la estructura de cubierta (2) a lo largo de dicho eje de rotación principal (X) y acoplado con libertad de rotación al primer elemento (6) por enroscado para recibir un movimiento de avance a lo largo de dicho eje de rotación principal (X) como consecuencia de una rotación del primer elemento (6) , definiendo dicho segundo elemento (8) un elemento de traslación de dicho actuador;
en el que dicho segundo elemento (8) tambien puede girar con respecto a la estructura de cubierta (2) alrededor de dicho eje de rotación principal (X) , comprendiendo ademas dicho actuador (1) medios de accionamiento (10) , activos al menos sobre dicho segundo elemento (8) para determinar una velocidad de rotación del segundo elemento (8) alrededor de dicho eje de rotación principal (X) de manera determina la velocidad de avance del segundo elemento (8) a lo largo de dicho eje de rotación principal (X) ;
en el que dichos medios de accionamiento (10) comprenden un tercer elemento (16'; 16"; 16"') fijado a dicha estructura de cubierta (2) y vinculado con dicho segundo elemento (8) por enroscado alrededor de dicho eje de rotación principal (X) de manera que, como consecuencia de una rotación relativa entre dichos segundo y tercer elementos (8 y 16'; 16"; 16"') , dicho segundo elemento (8) sufre un desplazamiento a lo largo de dicho eje de rotación principal (X) , determinando automaticamente, el acoplamiento simultaneo de dicho segundo elemento (8) con dichos primer y tercer elementos (6 y 16'; 16"; 16"') , una velocidad de rotación diferente del segundo elemento (8) con respecto a la velocidad de rotación del primer elemento (6) .
15. Actuador segun la reivindicación 14, caracterizado por el hecho que dichos primer y tercer elementos (6 y 16') estan dispuestos sobre respectivas partes de dicho segundo elemento (8) , estando dichas partes colocadas en sucesión a lo largo de dicho eje de rotación principal (X) .
16. Actuador segun la reivindicación 15, caracterizado por el hecho que dichas partes del segundo elemento (8) presentan respectivos filetes de rosca distribuidos segun sentidos recfprocamente opuestos de enroscado, pudiendo dichos filetes ser vinculados con correspondientes filetes obtenidos en el primer y en el tercer elementos (6 y 16") , respectivamente.
17. Actuador segun la reivindicación 14, caracterizado por el hecho que dicho segundo elemento (8) esta dispuesto sobre dicho primer elemento (6) , estando dicho tercer elemento (16"') fijado externamente a dicho segundo elemento (8) .
18. Actuador segun la reivindicación 17, caracterizado por el hecho que dicho segundo elemento (8) presenta un filete interno, orientado hacia el primer elemento (6) , y un filete externo, orientado hacia el tercer elemento (16"') , estando dichos filetes interno y externo distribuidos segun sentidos recfprocamente discordantes de enroscado.
19. Actuador segun una o mas de las precedentes reivindicaciones de 1 a 18, en el que dichos medios de accionamiento (10) le imponen a dicho segundo elemento (8) una velocidad de rotación, relativa a dicho eje de rotación principal (X) , que no es nula y que es diferente de la velocidad de rotación de dicho primer elemento (6) para permitir que la diferente velocidad de rotación entre el primer y el segundo elementos (6 y 8) provoque un desplazamiento axial del segundo elemento (8) .
20. Actuador segun una o mas de las precedentes reivindicaciones de 1 a 19, en el que dichos medios de accionamiento (10) determinan la velocidad de rotación del segundo elemento (8) en función de la velocidad de rotación del primer elemento (6) .
21. Actuador segun una o mas de las precedentes reivindicaciones de 1 a 18, en el que dicho primer elemento (6) es móvil exclusivamente segun un movimiento de rotación alrededor de dicho eje de rotación principal (X) , siendo dicho segundo elemento (8) móvil segun un movimiento de enroscado a lo largo de dicho eje de rotación principal (X) para deslizar con respecto al primer elemento (6) como consecuencia de una rotación recfproca entre dichos primer y segundo elementos (6 y 8) .
22. Actuador segun una o mas de las precedentes reivindicaciones de 1 a 21, en el que dicho segundo elemento (8) esta introducido con libertad de rotación dentro de dicho primer elemento (6) .
23. Actuador segun una o mas de las precedentes reivindicaciones de 1 a 22, en el que dichos primer y segundo elementos (6 y 8) estan acoplados recfprocamente por medio de una conexión de tornillo-tuerca.
24. Actuador segun una o mas de las precedentes reivindicaciones de 9 a 18, en el que dichos segundo y tercer elementos (8 y 16'; 16"; 16"') estan acoplados recfprocamente por medio de una conexión de tornillo-tuerca.
25. Actuador segun la reivindicación 23 6 24, caracterizado por el hecho que dicha conexión de tornillo-tuerca comprende una conexión roscada de husillo con bolas circulantes.
26. Actuador segun una o mas de las precedentes reivindicaciones de 1 a 25, caracterizado por el hecho que dicho eje de rotación principal (X) es fijo.
27. Actuador segun una o mas de las precedentes reivindicaciones de 1 a 26, en el que dicho primer elemento (5) esta conectado establemente, en su propia superficie externa, al rotor (5) de dicho motor electrico.
28. Actuador segun una o mas de las precedentes reivindicaciones de 1 a 27, en el que dicho primer elemento (8) gira coaxialmente a dicho motor electrico.
29. Actuador segun una o mas de las precedentes reivindicaciones de 1 a 28, en el que dicho motor electrico esta totalmente contenido dentro de dicha estructura de cubierta (2) .
30. Actuador segun una o mas de las precedentes reivindicaciones de 1 a 29, en el que el mismo comprende un elemento de tapa (9) , asociado con libertad de rotación a una extremidad frontal de dicho segundo elemento (8) para transmitir el empuje ejercido por el segundo elemento (8) independientemente de la rotación de dicho segundo elemento (8) .
31. Pinza de freno para un vehículo, que comprende un actuador (1) segun una o mas de las precedentes reivindicaciones de 1 a 30.
Patentes similares o relacionadas:
Accionamiento electromotriz de un mueble, del 6 de Mayo de 2020, de DewertOkin GmbH (100.0%): Accionamiento electromotriz de un mueble para un mueble reclinable o un mueble de asiento con un riel de guía y una unidad de eje de salida que se mueve […]
Sistema de suministro de energía undimotriz-eólica complementario para la generación de energía continua, del 8 de Enero de 2020, de Weng, Wen-kai: Sistema de suministro de energía undimotriz-eólica complementario para generación de energía continua, que comprende: un módulo de energía cinética de la ola , que […]
Servofreno y dispositivo de frenado con un servofreno de este tipo, del 2 de Octubre de 2019, de ROBERT BOSCH GMBH: Servofreno para un cilindro de freno principal de un vehículo a motor, con un motor de accionamiento , el cual está conectado o se puede conectar mediante […]
Sistema de tensado automatizado para transportador de cable o cadena, del 3 de Julio de 2019, de FLEXICON CORPORATION: Un sistema de tensado para un sistema de transporte con un elemento de tracción sin fin que se desplaza alrededor de […]
 Freno de servicio de vehículo con servo asistencia electromecánica e hidráulica de freno, del 29 de Mayo de 2019, de SFS INTEC HOLDING AG: Freno de servicio de vehículo activable electromecánicamente con un accionamiento lineal, en el que desde un actuador electromecánico […]
Freno de servicio de vehículo con servo asistencia electromecánica e hidráulica de freno, del 29 de Mayo de 2019, de SFS INTEC HOLDING AG: Freno de servicio de vehículo activable electromecánicamente con un accionamiento lineal, en el que desde un actuador electromecánico […]
Dispositivo de accionamiento dual de motor eléctrico, del 22 de Mayo de 2019, de DewertOkin GmbH (100.0%): Accionamiento dual de motor eléctrico para el desplazamiento de dos piezas de muebles diferentes de un mueble con dos unidades de accionamiento , […]
Dispositivo de detección de tope posterior en un accionador lineal, del 6 de Mayo de 2019, de VIRAX: Accionador lineal que consta de medios de accionamiento de un equipo móvil entre una posición de reposo y una posición activa, y un módulo electrónico […]
Transmisión para transformar un movimiento rotatorio en un movimiento lineal, del 17 de Abril de 2019, de Siemens Mobility GmbH: Transmisión para transformar un movimiento rotatorio en un movimiento lineal , sobre la que actúa una fuerza contraria (F) que actúa en la parte motriz, […]