PROCEDIMIENTO Y SISTEMA PARA ESTIMAR EL ÁREA DE IMPACTO DE UNA CARGA MILITAR LANZADA DESDE UN AVIÓN.
Un sistema para estimar el área de impacto de una carga inteligente que se puede lanzar desde un avión,
que comprende un montaje de procesamiento que incluye: carga; y medios para adquirir primeros datos o señales indicativos de las condiciones de vuelo del avión al arrojarse la medios de procesamiento que incluyen una pluralidad de redes neuronales, para estimar el punto de impacto de la carga en el objetivo; caracterizado porque dicho montaje de procesamiento incluye además medios para adquirir segundos datos o señales indicativos de las condiciones de impacto predeterminadas en el objetivo, y porque los medios de procesamiento se disponen para determinar un área de impacto poligonal como una función de los primeros y segundos datos o señales, incluyendo dichos medios de procesamiento una pluralidad de primeras redes neuronales, dispuestas para calcular las coordenadas de un punto central del área de impacto y de un número predeterminado de vértices del área, respectivamente
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2008/051341.
Solicitante: ALENIA AERONAUTICA S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIALE DELL'AERONAUTICA S.N.C. 80038 POMIGLIANO D'ARCO (NAPOLI) ITALIA.
Inventor/es: TRANCHERO,Bruno, GIURA,Alberto, CONVERSO,Stefania.
Fecha de Publicación: .
Fecha Solicitud PCT: 9 de Abril de 2008.
Clasificación Internacional de Patentes:
- G06N3/02 FISICA. › G06 CALCULO; CONTEO. › G06N SISTEMAS DE COMPUTADORES BASADOS EN MODELOS DE CALCULO ESPECIFICOS. › G06N 3/00 Sistemas de computadores basados en modelos biológicos. › que utilizan modelos de redes neuronales.
Clasificación PCT:
- F41G7/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2356798_T3.pdf

Fragmento de la descripción:
La presente invención se refiere a la integración de una carga militar con un avión y, más específicamente, a la estimación del tiempo de vuelo y del área de impacto en la superficie terrestre de una carga inteligente lanzada desde un avión.
El área de impacto de una carga balística o inteligente en la tierra es el área en la que se debe situar un 5 objetivo con el fin de ser golpeado con éxito por la carga. El tamaño y la forma del área dependen de las condiciones de vuelo del avión al arrojarse la carga, bajo condiciones atmosféricas (por ejemplo, temperatura, humedad y viento) y bajo condiciones de impacto predeterminadas en el objetivo (por ejemplo, dirección de llegada y ángulo de ataque de la carga con relación al objetivo, velocidad de impacto deseada).
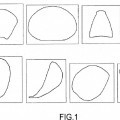
La Figura 1 muestra algunos ejemplos de formas de posibles áreas de impacto según diferentes condiciones 10 de arrojamiento e impacto de una carga.
Cuando una carga balística se va a arrojar a un objetivo hay un único punto de arrojamiento por el que, teóricamente, puede golpear el objetivo. En la práctica, el punto de impacto de la carga en la tierra tendrá una distribución de Gauss alrededor de un punto de impacto medio que sólo raramente coincide con el objetivo. El error se puede deber a una variación de las características de la carga (peso, centro de gravedad, momentos de inercia) o a 15 limitaciones del algoritmo de arrojamiento (parámetros no modelados), o incluso a imprecisiones en la estimación de los factores medioambientales (viento, densidad de aire, etc.).
En la actualidad, hay diversos algoritmos conocidos para el cálculo o estimación del área de impacto, que son usados por las compañías aeronáuticas para la integración de una carga con un avión.
Para una carga “inteligente”, la situación es más compleja ya que esa carga tiene la capacidad de navegar con 20 el fin de alcanzar un objetivo predefinido con un cierto grado de precisión. Si se conoce la posición de arrojamiento, los parámetros de vuelo del avión (por ejemplo, velocidad, aceleraciones, posición), las condiciones de impacto en el objetivo y las condiciones atmosféricas, es de ese modo necesario determinar si la carga tiene la capacidad de “guiarse a sí misma” al objetivo predefinido.
El área de impacto en la tierra en la que debe estar el objetivo predefinido con el fin de ser alcanzado con éxito 25 por la carga es por lo tanto un área dinámica que varía cuando cambian las condiciones conocidas.
Durante la planificación sobre el terreno de una misión que requiere el arrojamiento de una carga, el área de impacto se puede calcular con el uso de un sistema para simular el funcionamiento de la carga pero, para el éxito de la misión, es necesario también tener un sistema para estimar el área de impacto durante el vuelo, que tenga en cuenta el hecho de que el área de impacto puede variar durante la misión. 30
El problema de estimar el área de impacto de una carga inteligente en tiempo real es complejo y altamente no lineal, dependiendo de las condiciones de arrojamiento desde el avión y del impacto de la carga en el objetivo.
Las herramientas más altamente desarrolladas para la planificación sobre el terreno usan modelos complejos, por ejemplo, modelos de cálculo numérico con seis grados de libertad, para predecir la trayectoria de una carga desde el punto de arrojamiento hasta el objetivo. 35
Un modelo con seis grados de libertad está adaptado para calcular la trayectoria de la carga en base a los parámetros de rotación y de traslación de la carga, a los parámetros medioambientales, y a un modelo de control del vuelo de la carga. Además, el modelo se refina con el uso de datos obtenidos por pruebas de arrojamiento de carga con el fin de reducir el error de la predicción con respecto al caso concreto. La precisión del modelo es muy buena y el posible error se limita a algunos metros. 40
Sin embargo, ya que este modelo hace un uso intensivo de los recursos del sistema de procesamiento que rige su ejecución, no se puede usar para aplicaciones en tiempo real a bordo de un avión, por ejemplo, durante una misión.
Para aplicaciones en tiempo real, es necesario usar modelos paramétricos que emparejen los resultados del modelo con seis grados de libertad con la tolerancia más pequeña posible. 45
Una desventaja adicional de la técnica anterior es que los modelos con seis grados de libertad calculan áreas de impacto poligonales que están definidas por un número notablemente variable de vértices.
Con el fin de simplificar la herramienta de simulación de modo que se ponga a disposición también de aplicaciones en tiempo real, es deseable reducir las posibles formas de las áreas de impacto a formas poligonales con un número uniforme y limitado de vértices. 50
El objeto de la invención es proporcionar un procedimiento y un sistema para estimar el área de impacto de una carga inteligente, que estén adaptados para ejecutarse o instalarse, respectivamente, a bordo de un avión y para realizar los cálculos de estimación en tiempo real.
Para este fin, los temas de la invención son un sistema que tiene las características definidas por la Reivindicación 1 y un procedimiento que tiene las características definidas por la Reivindicación 8. 5
Formas de realización específicas forman los temas de las reivindicaciones dependientes.
Un tema adicional de la invención es un programa o conjunto de programas de procesamiento como se reivindica.
En resumen, los temas de la invención son un procedimiento y sistema de procesamiento para estimar, a bordo de un avión, en tiempo real, el área de impacto de una carga inteligente y el tiempo de vuelo respectivo. 10
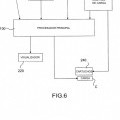
El procedimiento se implementa por medio de un programa o conjunto de programas de ordenador o rutinas de cálculo que constituyen una aplicación de software que se puede ejecutar por una pluralidad de módulos de procesamiento de un sistema de procesamiento complejo, adaptado para proveer a un piloto y/o un navegante de un avión que toma parte en una misión una representación gráfica del área de impacto estimada de una carga en la tierra en tiempo real. 15
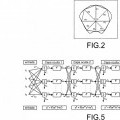
Entre las posibles técnicas que se pueden usar para el desarrollo de una metodología para la estimación en tiempo real de áreas de impacto, que incluyen planteamientos matemáticos basados en regresiones lineales, regresiones no lineales, y redes neuronales, la presente solicitud hace un uso intensivo de la técnica de redes neuronales de manera que se pueda implementar de forma ventajosa en una plataforma de vuelo no experimental. De las diversas arquitecturas de redes neuronales conocidas (arquitecturas de GRNN, recursiva, y de BPN), la arquitectura 20 de red neuronal que es considerada la que más se aproxima al funcionamiento de un modelo con seis grados de libertad para la estimación del tiempo de vuelo y de las áreas de impacto de una carga es una arquitectura de BPN.
La tarea de calcular el tiempo de vuelo y las áreas de impacto se divide de forma ventajosa en un grupo de tareas para calcular el tiempo de vuelo y las coordenadas con relación a un número predeterminado de puntos frontera (vértices) del área de impacto, respectivamente. 25
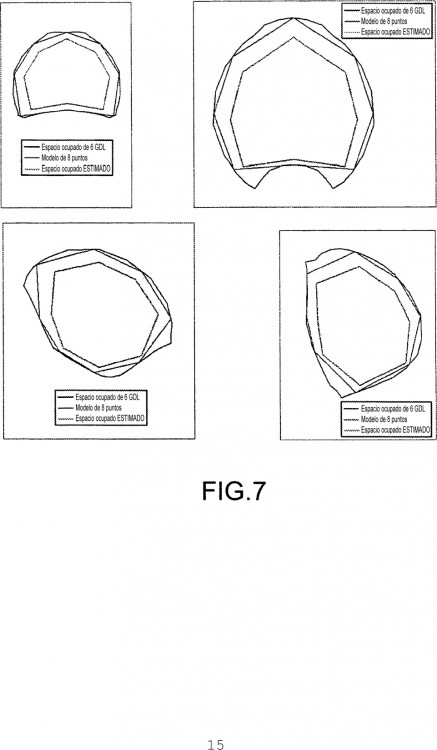
Se han llevado a cabo pruebas con diversos tipos de modelado de área de impacto que pueden reducir el número de vértices del área a 8, 10 ó 12 vértices, que se pueden obtener de las intersecciones de un número correspondiente de líneas rectas que se extienden por el punto centroide del área de impacto con el borde del área.
Se comprobó que el mejor compromiso entre la precisión del modelo y los requisitos computacionales es el modelado con 8 puntos en ángulos fijos. 30
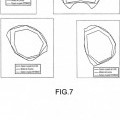
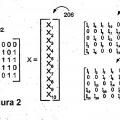
La Figura 2 ofrece un ejemplo de cómo se puede representar un área de impacto con 8 puntos de acuerdo con las coordenadas (Cx, Cy) de un punto centroide y los módulos de los radios R1-R8, y la Figura 3 muestra las formas típicas de las áreas de impacto de la Figura 1 modeladas con ocho radios en ángulos fijos.
Como los modelos conocidos con seis grados de libertad, el sistema de procesamiento de la invención se dispone de forma ventajosa para distinguir entre las condiciones que permiten un área de impacto y las que no 35 permiten un área de impacto. El reconocimiento de las condiciones que permiten un... [Seguir leyendo]
Reivindicaciones:
1. Un sistema para estimar el área de impacto de una carga inteligente que se puede lanzar desde un avión, que comprende un montaje de procesamiento que incluye:
medios para adquirir primeros datos o señales indicativos de las condiciones de vuelo del avión al arrojarse la carga; y 5
medios de procesamiento que incluyen una pluralidad de redes neuronales, para estimar el punto de impacto de la carga en el objetivo;
caracterizado porque dicho montaje de procesamiento incluye además medios para adquirir segundos datos o señales indicativos de las condiciones de impacto predeterminadas en el objetivo, y
porque los medios de procesamiento se disponen para determinar un área de impacto poligonal como una 10 función de los primeros y segundos datos o señales, incluyendo dichos medios de procesamiento una pluralidad de primeras redes neuronales, dispuestas para calcular las coordenadas de un punto central del área de impacto y de un número predeterminado de vértices del área, respectivamente.
2. Un sistema según la Reivindicación 1, en el que las primeras redes neuronales se disponen para el cálculo de los radios que se extienden desde el punto central del área de impacto, que están adaptados para definir el número 15 predeterminado de vértices.
3. Un sistema según la Reivindicación 1 o la Reivindicación 2, en el que los medios de procesamiento incluyen una pluralidad de segundas redes neuronales que se disponen para el cálculo del tiempo de vuelo a los vértices del área de impacto.
4. Un sistema según una cualquiera de las reivindicaciones precedentes, en el que los medios de procesamiento 20 para determinar un área de impacto incluyen una pluralidad de terceras redes neuronales que se disponen para estimar la existencia del área de impacto como una función de los primeros y segundos datos o señales indicativos de las condiciones de vuelo del avión al arrojarse la carga y de las condiciones de impacto predeterminadas en el objetivo.
5. Un sistema según la Reivindicación 4, en el que las primeras, segundas y terceras redes neuronales son redes neuronales de retropropagación con 3 a 5 capas y comprenden funciones de transferencia entre las capas que se 25 seleccionan del grupo que comprende funciones de transferencia lineal, senoidal, tangente hiperbólica, Gaussiana, o Gaussiana complementaria.
6. Un sistema según la Reivindicación 5, en el que las primeras, segundas y terceras redes neuronales comprenden redes neuronales de retropropagación de 5 capas con 3 capas ocultas, que tienen una función de transferencia tangente hiperbólica de la primera capa oculta, una función de transferencia Gaussiana de la segunda capa 30 oculta, una función de transferencia Gaussiana complementaria de la tercera capa oculta, y una función de transferencia de salida lineal, respectivamente.
7. Un sistema según una cualquiera de las reivindicaciones precedentes, en el que los medios de procesamiento se disponen para reducir el valor de los radios del área de impacto particularmente para aplicar un primer factor para la reducción de los radios frontales del área de impacto, con respecto a la dirección de desplazamiento del avión, y para 35 aplicar un segundo factor para la reducción de los radios traseros del área de impacto, para calcular las coordenadas del número predeterminado de vértices de un área de impacto reducida, y para calcular el tiempo de vuelos de la carga a los vértices del área de impacto reducida.
8. Un procedimiento de estimación del área de impacto de una carga inteligente que se puede lanzar desde un avión, estando adaptado el procedimiento para implementarse por medio de un montaje de procesamiento electrónico que 40 comprende medios para determinar un área de impacto poligonal definida por las coordenadas de un punto central y de un número predeterminado de vértices, como una función de los primeros y segundos datos o señales indicativos de las condiciones de vuelo del avión al arrojarse la carga y de las condiciones de impacto predeterminadas del objetivo, respectivamente,
incluyendo los medios una pluralidad de primeras redes neuronales dispuestas para calcular las coordenadas del 45 punto central del área de impacto y del número predeterminado de vértices del área, respectivamente,
comprendiendo el procedimiento:
una etapa de aprendizaje en la que el montaje de procesamiento recibe primeros y segundos datos o señales de entrenamiento de entrada indicativos de las condiciones de vuelo del avión al arrojarse la carga y de las condiciones de impacto predeterminadas en el objetivo respectivamente, así como datos de entrenamiento de salida asociados indicativos 50 de las coordenadas de un punto central y de un número predeterminado de vértices de un área de impacto, y determina
las funciones de transferencia entre las capas de las primeras redes neuronales como una función de los datos de entrenamiento de entrada y de salida, y
una etapa de ejecución en la que el montaje de procesamiento recibe, como entradas, primeros y segundos datos o señales de medición y calcula una estimación del área de impacto como resultado de la aplicación de las funciones de transferencia. 5
9. Un procedimiento según la Reivindicación 8, en el que las primeras redes neuronales se disponen para calcular los radios, que se extienden desde el punto central del área de impacto, que están adaptados para definir el número predeterminado de vértices.
10. Un procedimiento según la Reivindicación 8 o la Reivindicación 9, en el que los medios incluyen una pluralidad de segundas redes neuronales dispuestas para calcular el tiempo de vuelo a los vértices del área de impacto, 10 respectivamente,
comprendiendo el procedimiento:
una etapa de aprendizaje en la que el montaje de procesamiento recibe primeros datos o señales de entrenamiento de entrada indicativos de las condiciones de vuelo del avión al arrojarse la carga y segundos datos o señales de entrenamiento de entrada indicativos de las condiciones de impacto predeterminadas en el objetivo, así como 15 datos de entrenamiento de salida asociados indicativos del tiempo de vuelo a los vértices del área de impacto, y determina las funciones de transferencia entre las capas de las segundas redes neuronales como una función de los datos de entrenamiento de entrada y salida, y
una etapa de ejecución en la que el montaje de procesamiento recibe, como entradas, primeros y segundos datos o señales de medición y calcula una estimación del tiempo de vuelo a los vértices del área de impacto como resultado de 20 la aplicación de las funciones de transferencia.
11. Un procedimiento según una cualquiera de las Reivindicaciones 8 a 10, en el que los medios incluyen una pluralidad de terceras redes neuronales dispuestas para estimar la existencia del área de impacto, respectivamente,
comprendiendo el procedimiento:
una etapa de aprendizaje en la que el montaje de procesamiento recibe primeros datos o señales de 25 entrenamiento de entrada indicativos de las condiciones de vuelo del avión al arrojarse la carga y segundos datos o señales de entrenamiento de entrada indicativos de las condiciones de impacto predeterminadas en el objetivo, así como datos de entrenamiento de salida asociados indicativos de la existencia de un área de impacto, y determina las funciones de transferencia entre las capas de las terceras redes neuronales como una función de los datos de entrenamiento de entrada y de salida, y 30
una etapa de ejecución en la que el montaje de procesamiento recibe, como entradas, primeros y segundos datos o señales de medición y determina la presencia o ausencia de un área de impacto como resultado de la aplicación de las funciones de transferencia.
12. Un procedimiento según una cualquiera de las Reivindicaciones 8 a 11, en el que las primeras, segundas y terceras redes neuronales son redes neuronales de retropropagación con 3 a 5 capas y comprenden funciones de 35 transferencia entre las capas que se seleccionan del grupo que comprende funciones de transferencia lineal, senoidal, tangente hiperbólica, Gaussiana, y Gaussiana complementaria.
13. Un procedimiento según la Reivindicación 12, en el que las primeras, segundas y terceras redes neuronales comprenden redes neuronales de retropropagación de 5 capas con 3 capas ocultas que tienen una función de transferencia tangente hiperbólica de la primera capa oculta, una función de transferencia Gaussiana de la segunda capa 40 oculta, una función de transferencia Gaussiana complementaria de la tercera capa oculta, y una función de transferencia de salida lineal, respectivamente.
14. Un procedimiento según una cualquiera de las reivindicaciones precedentes, que comprende la reducción del valor de los radios del área de impacto, el cálculo de las coordenadas del número predeterminado de vértices de un área de impacto reducida, y el cálculo del tiempo de vuelos de la carga a los vértices del área de impacto reducida, en el que la 45 reducción del valor de los radios del área de impacto comprende la aplicación de un primer factor de reducción a los radios frontales del área de impacto, con respecto a la dirección de desplazamiento del avión, y la aplicación de un segundo factor de reducción a los radios traseros del área de impacto.
15. Un programa o conjunto de programas de procesamiento adaptado para ser ejecutado por un sistema de procesamiento y que está adaptado para llevar a cabo el procedimiento según la reivindicación 8. 50
Patentes similares o relacionadas:
Red y método para sistemas informáticos escalables accionados por eventos, del 8 de Julio de 2020, de UNIVERSITAT ZURICH: Una red que comprende una pluralidad de circuitos de núcleo interconectados , en la que cada circuito de núcleo comprende: - una matriz […]
Detección in situ de adulteraciones en alimentos por termografía infrarroja y algoritmos inteligentes, del 7 de Febrero de 2020, de UNIVERSIDAD COMPLUTENSE DE MADRID: Detección in situ de adulteraciones en alimentos por termografía infrarroja y algoritmos inteligentes. El método de detección in situ de […]
Sistema con capacidades colaborativas para estimar patrones de uso y estados de funcionamiento en diversos sistemas electromecánicos, del 14 de Junio de 2018, de AERIN SISTEMAS S.L: 1. Sistema con capacidades colaborativas para estimar patrones de uso y estados de funcionamiento en diversos sistemas electromecánicos caracterizado […]
CONJUNTO AUTÓNOMO DE DISPOSITIVOS Y MÉTODO PARA LA DETECCIÓN E IDENTIFICACIÓN DE ESPECIES VEGETALES EN UN CULTIVO AGRÍCOLA PARA LA APLICACIÓN DE AGROQUÍMICOS EN FORMA SELECTIVA, del 19 de Octubre de 2017, de PEREZ ROCA, Diego Hernan: Un conjunto autónomo de dispositivos para la detección e identificación de especies vegetales, tanto silvestres como cultivadas, en una explotación agrícola, es un […]
Determinación de indicadores para la probabilidad de impacto de un sistema de armas, del 23 de Agosto de 2017, de Airbus Defence and Space GmbH: Procedimiento para determinar un indicador (24a, 24b, 24c, 24d) para la probabilidad de impacto de un sistema de armas , comprendiendo el procedimiento […]
SISTEMA Y MÉTODO DE PREDICCIÓN DE FALLAS EN EQUIPOS REMOTAMENTE DISTRIBUIDOS, del 22 de Junio de 2017, de DIAZ QUINTANAR, José Antonio: El presente invento describe un Sistema Y Método De Predicción De Fallas En Equipos Remotamente Distribuidos compuesto de Los sensores instalados en puntos clave de los […]
 Procedimientos y aparatos para descodificar códigos LDPC, del 13 de Agosto de 2014, de QUALCOMM INCORPORATED: Un procedimiento de realización del procesamiento de descodificación del paso de mensajes de control de paridad, usando gráficos vectorizados […]
Procedimientos y aparatos para descodificar códigos LDPC, del 13 de Agosto de 2014, de QUALCOMM INCORPORATED: Un procedimiento de realización del procesamiento de descodificación del paso de mensajes de control de paridad, usando gráficos vectorizados […]
PROVISION DE SOPORTE DE DECISIONES PARA EL INFARTO AGUDO DE MIOCARDIO, del 16 de Julio de 2006, de GROTH, TORGNY ELLENIUS, JOHAN: Provisión de soporte de decisiones para el infarto de miocardio, para mejorar adicionalmente la calidad del soporte de decisión para la valoración […]