LUZ ESTRUCTURADA CODIFICADA.
Sistema para crear un modelo tridimensional de una superficie que comprende lo siguiente:
(a) una fuente de luz (1.2) que proyecta un patrón de segmentos de línea continuos sobre la superficie, en la que un segmento de línea continuo es un segmento de línea de píxeles o puntos continuos que no tiene intersticios visibles y siendo codificado cada segmento de línea con un patrón único de intensidad o anchura de línea variable a lo largo del segmento de línea, (b) un detector (1.3) que registra una imagen de la superficie con dicho patrón proyectado, y (c) un ordenador (PC) para transformar dicha imagen en un modelo tridimensional de la superficie que utiliza dicho patrón proyectado
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DK2006/000664.
Solicitante: 3SHAPE A/S.
Nacionalidad solicitante: Dinamarca.
Dirección: HOLMENS KANAL 7, 4. SAL, 1060 COPENHAGEN DINAMARCA.
Inventor/es: FISKER,RUNE, CLAUSEN,TAIS, DEICHMANN,NIKOLAJ, VINTHER,MICHAEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Noviembre de 2006.
Fecha Concesión Europea: 4 de Agosto de 2010.
Clasificación Internacional de Patentes:
- A61B5/107L
- G01B11/25D
- G01B11/25F4
Clasificación PCT:
- A61B1/227 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 1/00 Instrumentos para proceder al examen médico de las cavidades o conductos del cuerpo por inspección visual o fotográfica, p. ej. endoscopios (examen de las cavidades o conductos del cuerpo utilizando ondas ultrasónicas, sónicas o infrasónicas A61B 8/12; instrumentos endoscópicos para la toma de muestras celulares o para biopsias A61B 10/04; con fines quirúrgicos A61B 17/00; instrumentos quirúrgicos endoscópicos A61B 17/94; instrumentos quirúrgicos que utilizan un haz láser dirigido a lo largo o a través de un conducto flexible A61B 18/22 ); Dispositivos de iluminación al efecto (para los ojos A61B 3/00). › para los oídos, es decir, otoscopios.
- A61B5/107 A61B […] › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Medida de dimensiones corporales, p. ej. la talla del cuerpo entero o de partes del mismo.
- G01B11/25 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La presente invención se refiere a un sistema y un procedimiento para crear un modelo tridimensional de una superficie mediante luz estructurada codificada.
Antecedentes de la invención
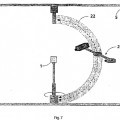
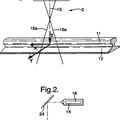
Un procedimiento para producir un modelo tridimensional digital de un objeto físico [1.1] consiste en proyectar un patrón de luz conocido [1.2] sobre la superficie del objeto, registrar el patrón proyectado con una cámara [1.3] desde un ángulo diferente (figura 1) y después calcular la forma de la superficie a partir de la deformación registrada del patrón. Cuando se conocen las posiciones relativas y los parámetros internos del proyector y la cámara, entonces puede calcularse la forma tridimensional de la parte iluminada del objeto utilizando triangulación. Este procedimiento se conoce como escaneo con luz estructurada y está descrito en la técnica anterior.
La identificación de características en el patrón presenta un problema que se ha resuelto de diversas formas en los sistemas existentes. Salvi y col. (2004) proporcionan una amplia revisión general de estrategias existentes de codificación de patrones. Las principales categorías son las siguientes:
Proyectar solamente una única línea. Si solamente
se proyecta una única línea, no existe riesgo de identificación errónea (suponiendo que no exista iluminación externa del objeto), pero solo se cubrirá una delgada franja de la superficie del objeto, por lo que será necesario un gran número de escaneos desde diferentes ángulos para cubrir la superficie. Esto requiere tiempo y un movimiento controlado del objeto o el proyector y la cámara, lo que añade complejidad al sistema de escáner.
Proyectar líneas o puntos codificados con diferentes colores o escalas de grises. Los puntos
o las líneas individuales pueden identificarse si tienen diferentes colores / escalas de grises siempre que el objeto sea de un color (prácticamente) uniforme o que pueda registrarse una imagen del objeto con iluminación uniforme. Adquirir imágenes del objeto con iluminación uniforme y con el patrón proyectado requiere que el sistema esté estacionario entre los dos registros y esto no es adecuado para los escáneres de mano o los objetos en movimiento. Asimismo, el uso de color introduce posibles imprecisiones (resolución reducida) debido a que la luz de diferentes colores tiene diferentes ángulos de refracción en la cámara y las lentes del proyector y debido a la tecnología utilizada en los chips habituales de las cámaras. Un ejemplo de un sistema de luz codificada en color puede encontrarse en el documento de patente estadounidense nº 6.147.760. Pagès y col. (2004) y el documento JP02110305A describen sistemas que aplican líneas coloreadas.
Patrones que varían en función del tiempo. Proyectar varios patrones diferentes en los que, por ejemplo, son visibles varias líneas puede proporcionar determinada identificación de las líneas, pero nuevamente esto requiere adquirir varias imágenes manteniendo el objeto, la cámara y el proyector estacionarios. También requiere de un proyector capaz de cambiar el patrón y un proyector de este tipo será más costoso que uno con una imagen fija. Un ejemplo de un sistema que aplica una codificación variable en función del tiempo se describe en el documento de patente estadounidense nº 4.653.104.
El documento US 5.680.216 proporciona un ejemplo de mediciones raster-estereográficas (2D) mediante la proyección de una pluralidad de líneas de trama moduladas sobre una
superficie.
El escaneo en una cavidad reducida como, por ejemplo, la boca o el canal auditivo, limita el tamaño posible del escáner y, además, un dispositivo de mano a menudo será la solución más económica y manejable para una aplicación de este tipo. Si el escáner es de mano, no puede esperarse tener una escena estacionaria todo el tiempo aunque se le indique al usuario que sujete el dispositivo de forma estable. Esto significa que los patrones variables en función del tiempo serán problemáticos y que el movimiento entre las imágenes adquiridas de forma consecutiva puede ser desconocido, por lo que es deseable tener tanta información como sea posible en una única imagen.Resumen de la invención
La presente invención proporciona una solución a los problemas antes mencionados ya que la presente invención proporciona un sistema y un procedimiento que pueden utilizarse en relación con una escena dinámica dado que la presente invención ofrece el cálculo a partir de una imagen de un único cuadro (es decir, un disparo) para proporcionar un modelo tridimensional.
En correspondencia, en un aspecto la presente invención se refiere a un sistema para crear un modelo tridimensional de una superficie que comprende :
(a) una fuente de luz que proyecta un patrón de segmentos de línea continuos sobre la superficie, siendo codificado cada segmento de línea con un único patrón de intensidad o anchura de línea variable a lo largo del segmento de línea,
(b) un detector que registra una imagen de la superficie con dicho patrón proyectado, y
(c) un ordenador para transformar dicha imagen en un modelo tridimensional de la superficie que utiliza dicho patrón proyectado.
En otro aspecto, la invención se refiere a un procedimiento para crear un modelo tridimensional de una superficie que comprende los siguientes pasos:
(a) proyectar desde una fuente de luz un patrón de segmentos de línea continuos sobre la superficie, siendo codificado cada segmento de línea con un único patrón de intensidad o anchura de línea variable a lo largo del segmento de línea,
(b) registrar una imagen de la superficie con dicho patrón proyectado, y
(c) transformar dicha imagen en un modelo tridimensional de la superficie utilizando dicho patrón proyectado.
Descripción de los dibujos
Figura 1 Escáner de luz estructurada con una cámara y un proyector. Figura 2 Patrón de luz estructurada proyectado sobre una superficie simple. Figura 3 Patrón de luz estructurada proyectado sobre una
superficie compleja. Figura 4 Codificación binaria a lo largo de líneas. Figura 5 Codificación de frecuencia con ocho frecuencias
diferentes y dos secuencias con diferente fase.
Figura 6 La altura vertical y la posición de los bits se mantienen independientemente de la forma del objeto.
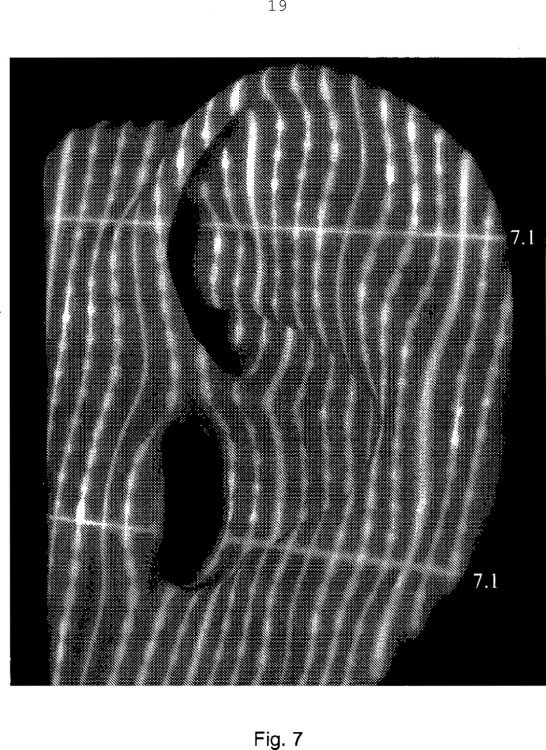
Figura 7 Una oreja con patrón codificado de bits
proyectado. Figura 8 Diapositiva con patrón de líneas codificado. Figura 9 Interpolación de la superficie entre líneas
utilizando triángulos.
Definiciones
A lo largo de la línea: significa en la dirección de la línea.
Segmento de línea continuo: significa un segmento de línea de puntos o píxeles continuos sin huecos visibles en la imagen.
Modelo tridimensional: conjunto de datos que representan la distribución espacial de la superficie del objeto que está siendo modelado dentro de la precisión del
proceso de recopilación de datos.
Patrón único: modulación predeterminada reconocible de un segmento de línea que identifica dicho segmento de línea respecto a cualquier otro segmento de línea proyectado por la fuente de luz, o respecto a segmentos de línea próximos. Un patrón único puede repetirse en segmentos de línea que pertenecen a la misma línea. En otra definición, un patrón único es una modulación reconocible predeterminada de un segmento de línea que hace que dicho segmento de línea pueda distinguirse de cualquier otro segmento de línea proyectado por la fuente de luz o pueda distinguirse de segmentos de línea cercanos. En este documento se define ‘segmentos de línea cercanos' como segmentos de línea en los que un segmento de línea visualizado por el detector puede identificarse como procedente del segmento de línea original correcto proyectado por la fuente de luz o identificarse como un segmento de línea cercano. Dicha identificación también puede ser más o menos ambigua entre el segmento de línea correcto y cualquier elemento de línea cercano. Un patrón único puede repetirse en segmentos de línea pertenecientes a la misma línea.
Frecuencia y fase: modulación sinusoidal de un segmento de línea en la que dicha modulación puede reconocerse mediante la frecuencia y / o fase de dicha modulación. La fase de dicha modulación se mide a menudo en relación con una referencia...
Reivindicaciones:
1. Sistema para crear un modelo tridimensional de una superficie que comprende lo siguiente:
(a) una fuente de luz (1.2) que proyecta un patrón de segmentos de línea continuos sobre la superficie, en la que un segmento de línea continuo es un segmento de línea de píxeles o puntos continuos que no tiene intersticios visibles y siendo codificado cada segmento de línea con un patrón único de intensidad o anchura de línea variable a lo largo del segmento de línea,
(b) un detector (1.3) que registra una imagen de la superficie con dicho patrón proyectado, y
(c) un ordenador (PC) para transformar dicha imagen en un modelo tridimensional de la superficie que utiliza dicho patrón proyectado.
2. Sistema según la reivindicación 1, en el que la fuente de luz proyecta un patrón de líneas sobre la superficie, consistiendo cada línea en una pluralidad de dichos segmentos de línea continuos.
3. Sistema según la reivindicación 2, en el que cada línea consiste en una continuidad de dichos segmentos de línea continuos.
4. Sistema según cualquiera de las reivindicaciones precedentes, en el que el mismo patrón único se codifica a lo largo de todos los segmentos de línea continuos en una línea.
5. Sistema según cualquiera de las reivindicaciones precedentes, en el que el patrón único consiste en un cambio periódico de la anchura del segmento de línea.
6. Sistema según la reivindicación 5, en el que, en combinación con el cambio de anchura, el patrón único consiste en un cambio periódico del color del segmento de
línea.
7. Sistema según cualquiera de las reivindicaciones precedentes, en el que el patrón único consiste en un cambio periódico en la escala de grises del segmento de línea.
8. Sistema según cualquiera de las reivindicaciones precedentes, en el que el patrón único se repite para cada n líneas del patrón, y n es un número entero de al menos 2.
9. Sistema según cualquiera de las reivindicaciones precedentes, en el que los segmentos de línea continuos se codifican utilizando una secuencia binaria.
10. Sistema según cualquiera de las reivindicaciones precedentes, en el que los segmentos de línea continuos se codifican modificando la frecuencia y/o fase del patrón.
11. Sistema según cualquiera de las reivindicaciones precedentes, en el que la longitud de cada segmento de línea continuo es al menos dos veces la anchura menor del segmento de línea continuo.
12. Sistema según cualquiera de las reivindicaciones precedentes, en el que la fuente de luz emite luz visible.
13. Sistema según cualquiera de las reivindicaciones precedentes 1-11, en el que la fuente de luz emite luz invisible.
14. Sistema según cualquiera de las reivindicaciones precedentes, en el que el detector es una cámara.
15. Sistema según la reivindicación 1, en el que la fuente de luz proyecta adicionalmente sobre la superficie líneas que tienen un ángulo predeterminado respecto a los segmentos de línea continuos.
16. Procedimiento para crear un modelo tridimensional de una superficie que comprende los siguientes pasos:
(a) proyectar desde una fuente de luz un patrón de segmentos de línea continuos sobre la superficie, siendo un segmento de línea continuo un segmento de puntos o píxeles continuos que no tiene intersticios visibles y en el que cada segmento de línea se codifica con un único patrón de intensidad o anchura de línea variable a lo largo del segmento de línea,
(b) registrar una imagen de la superficie con dicho patrón proyectado, y
(c) transformar dicha imagen en un modelo tridimensional de la superficie utilizando dicho patrón proyectado.
17. Procedimiento según la reivindicación 16, realizado mediante el sistema según cualquiera de las reivindicaciones 1-15.
18. Procedimiento según la reivindicación 16 o 17, en el que la superficie es la superficie del canal auditivo de una persona o una superficie de un modelo tridimensional del canal auditivo.
19. Procedimiento según la reivindicación 16 o 17, en el que la superficie es una superficie de un diente o varios dientes o una superficie de un modelo tridimensional de un diente o varios dientes.
Patentes similares o relacionadas:
 INSTALACION Y PROCEDIMIENTO AUTOMATICOS DE TOMA DE MEDIDAS Y DE ADQUISICION DE FORMAS, del 1 de Diciembre de 2009, de TELMAT INDUSTRIE (SOCIETE ANONYME): Instalación automática de adquisición de formas tridimensionales y de toma de medidas de sujetos, en especial en la forma de una cabina destinada […]
INSTALACION Y PROCEDIMIENTO AUTOMATICOS DE TOMA DE MEDIDAS Y DE ADQUISICION DE FORMAS, del 1 de Diciembre de 2009, de TELMAT INDUSTRIE (SOCIETE ANONYME): Instalación automática de adquisición de formas tridimensionales y de toma de medidas de sujetos, en especial en la forma de una cabina destinada […]
PROCEDIMIENTO Y APARATO PARA DETERMINAR LA DIMENSIÓN GEOMÉTRICA DE UNA RUEDA DE VEHÍCULO QUE COMPRENDE SENSORES ÓPTICOS, del 24 de Noviembre de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Un procedimiento de montaje o desmontaje de un neumático de vehículo a motor que comprende las etapas de: - fijar una llanta de una rueda de vehículo a […]
 PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR LAS COORDENADAS ESPACIALES DE UN ARTÍCULO, del 8 de Abril de 2011, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para determinar las coordenadas espaciales de un artículo, en el que el artículo se ilumina con un dispositivo de proyección a partir de al menos dos direcciones […]
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR LAS COORDENADAS ESPACIALES DE UN ARTÍCULO, del 8 de Abril de 2011, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para determinar las coordenadas espaciales de un artículo, en el que el artículo se ilumina con un dispositivo de proyección a partir de al menos dos direcciones […]
 ESCANEADO OPTICO DE UN PERFIL, del 21 de Abril de 2010, de DELTARAIL GROUP LIMITED: Un método de determinación de un perfil de una superficie de un objeto , teniendo el objeto un eje longitudinal y siendo el perfil perpendicular al eje longitudinal, […]
ESCANEADO OPTICO DE UN PERFIL, del 21 de Abril de 2010, de DELTARAIL GROUP LIMITED: Un método de determinación de un perfil de una superficie de un objeto , teniendo el objeto un eje longitudinal y siendo el perfil perpendicular al eje longitudinal, […]
Dispositivo y procedimiento para la detección sin contacto de estructuras de tejido rojas, así como disposición para desprender una banda de estructuras de tejido rojas, del 22 de Julio de 2020, de NORDISCHER MASCHINENBAU RUD. BAADER GMBH + CO KG: Dispositivo para la detección sin contacto de estructuras de tejido rojas en productos de carcasas de animales sacrificados, que comprende un equipo […]
Imagen detallada de video de la geometría de vía, del 17 de Junio de 2020, de VolkerRail Nederland BV: Tren de medición con un sistema óptico que cuenta con medios para realizar un registro de imágenes con una cámara y una lámpara, por ejemplo, imágenes detalladas de […]
Método y dispositivo de medida de planicidad de un producto metálico, del 3 de Junio de 2020, de Primetals Technologies Austria GmbH: Metodo de medida de planicidad de un producto metalico, en forma o bien de una banda o bien de una placa de una linea de tratamiento metalurgico, dicho producto […]
Transmisión de máscara espacial afín e invariante para la detección de profundidad activa, del 6 de Mayo de 2020, de QUALCOMM INCORPORATED: Un procedimiento operativo en un dispositivo transmisor para proyectar una máscara de código compuesta , que comprende: obtener […]