ESTRUCTURA DE SOPORTE PARA VEHICULO OMNIDIRECCIONAL CON CONTROL AUTOMATICO DE SU MOVIMIENTO.
1. Estructura de soporte para vehículo omnidireccional con control automático de su movimiento,
en particular una estructura de soporte diseñada para la implementación de un vehículo capacitado para realizar cualquier movimiento de giro sobre cualquier punto o cualquier desplazamiento tanto en dirección longitudinal como transversal de forma autónoma, sin necesidad de persona alguna y en un espacio realmente reducido, caracterizada porque la estructura de soporte incluye como elementos de desplazamiento el montaje de cuatro grupos de rueda omnidireccional de rodillos (1), medios electrónicos de control y medios mecánicos de sustento, con la particularidad de que cada grupo de rueda está constituido preferentemente por cuatro discos o anillos (4) de rodillos posicionados mutuamente adyacentes, vinculados por medio de tornillos (17) o similares, que pasan a través de orificios (7) y posicionados alternativamente desfasados de modo que los rodillos (1) de discos o anillos adyacentesquedan situados al tresbolillo.2. Estructura según la reivindicación 1, caracterizada porque cada grupo de rueda está alojado en el interior de una envolvente (10) metálica, en cuyo espacio interior se alojan además medios de arrastre de rueda constituidos por un órgano motriz tal como un motor (11) de accionamiento controlado electrónicamente, y elementos de transmisión de movimiento hasta el grupo de rueda, consistentes en una cadena (12) engranada en un piñón (9) solidario con el grupo de rueda.3. Estructura según la reivindicación 2, caracterizada porque, alternativamente, los medios de transmisión de movimiento desde el órgano motriz pueden incluir correas dentadas o no dentadas, cadenas, piñones, grupos de engranajes, o cualquier otro apropiado.4. Estructura según la reivindicación 2 ó 3, caracterizada porque el motor (11) incluye un variador de velocidad y un encóder de control.5. Estructura según una o más de las reivindicaciones 1 a 4, caracterizada porque incluye además medios de amortiguación asociados a cada grupo de rueda, destinados a garantizar el correcto apoyo de la rueda sobre la superficie de desplazamiento con independencia del nivel de carga de la estructura, montados sobre la envolvente (10) metálica respectiva, y constituidos por un número de vástagos (14) insertados en el interior de muelles (15) respectivos
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201000544.
Solicitante: AUTOMATISMOS Y SISTEMAS DE TRANSPORTE INTERNO, S.A.U.
Nacionalidad solicitante: España.
Provincia: BURGOS.
Inventor/es: PASCUAL SALDAÑA,ANGEL MARIA.
Fecha de Solicitud: 25 de Mayo de 2010.
Fecha de Publicación: .
Fecha de Concesión: 1 de Febrero de 2011.
Clasificación PCT:
- B60W10/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00).
Fragmento de la descripción:
Estructura de soporte para vehículo omnidireccional con control automático de su movimiento.
Objeto de la invención
La presente invención se refiere a una estructura de soporte para vehículo omnidireccional con control automático de su movimiento, que aporta esenciales características de novedad y notables ventajas con respecto a los medios conocidos y utilizados para los mismos fines en el estado actual de la técnica.
Más en particular, la invención desarrolla una estructura de sustentación especialmente diseñada para su aplicación a vehículos de movimiento omnidireccional, cuya estructura incluye medios dinámicos que permiten al vehículo moverse en cualquier dirección de forma autónoma, sin necesidad de intervención humana, para su incorporación en la automatización de procesos en espacios limitados merced a la capacidad de realización de movimientos precisos en relación con giros sobre si mismo, giros sobre cualquier punto, movimientos longitudinales, movimientos transversales, o una combinación de cualquiera de éstos asociada a la realización de maniobras en menores espacios que los sistemas actuales. En esencia, la estructura de la invención comprende un conjunto de cuatro grupos de ruedas motrices del tipo de rodillos, montadas en una estructura de unión que a su vez proporciona soporte para el resto de los elementos del vehículo; medios de control electrónico, y un conjunto mecánico de sustento.
El campo de aplicación de la invención se encuentra comprendido dentro del sector industrial dedicado al diseño y fabricación de ingenios para la automatización de procesos productivos e industriales en instalaciones de espacio reducido.
Antecedentes y Sumario de la invención
Los expertos en la materia son conocedores de la existencia en el estado actual de la técnica de diferentes tipos de vehículos automatizados susceptibles de movimiento omnidireccional logrado con la ayuda de múltiples tipos de grupos de ruedas montadas en sus respectivas estructuras de soporte. Un caso muy concreto y particular de utilización de vehículos del tipo comentado puede ser encontrado en la gestión de almacenes inteligentes, donde los vehículos se mueven de forma autónoma por los espacios existentes entre estanterías adyacentes, de manera que no solo se consigue un ahorro económico considerable en la gestión de este tipo de instalaciones de almacenamiento, sino que además se logra una optimización del espacio dadas las características especificas de diseño de tales vehículos automatizados. En los vehículos existentes, la automatización de logra con la ayuda de tecnologías muy diversas, tal como la propia concepción de estos vehículos a modo de autómatas programables, la utilización de tecnologías de tipo RFID, o cualquier otro sistema de control eficaz adecuado para la aplicación concreta a la que se destine.
En el caso de la presente invención, la estructura de soporte preconizada ha sido específicamente diseñada para mejorar los niveles de concepción y operatividad de los vehículos convencionales, dada su alta capacidad operativa y la propiedad de omnidireccionalidad con un máximo aprovechamiento del espacio de maniobra, es decir, con unas necesidad mínimas de espacio para la realización de movimientos precisos en cualquier dirección, de forma autónoma y sin necesidad de intervención humana.
Para ello, la estructura de soporte de la invención ha sido diseñada de modo que incorpora cuatro grupos de rueda omnidireccionales, un grupo en cada una de las esquinas de la estructura, siendo las ruedas utilizadas del tipo de las que se conocen como "ruedas holandesas", es decir, ruedas de rodillos, constituidas por discos que portan los rodillos en su periferia, con la particularidad de que cada grupo de rueda está constituido por cuatro discos acoplados entre si, vinculados mediante tornillos, pernos roscados, o cualquier otro medio adecuado, mediante los que se obtiene un grupo de rueda sustancialmente mejorado frente a los grupos de rueda convencionales que utilizan únicamente dos discos, al proporcionar un apoyo constante sobre cualquier tiño de superficie en la que apoye. Los discos están desfasados entre si de manera que los rodillos respectivos quedan dispuestos al tresbolillo, garantizando con ello el apoyo permanente y el direccionamiento adecuado en cualquier posición del grupo de rueda. El accionamiento de cada grupo de rueda se realiza por medio de elementos de transmisión de movimiento, que con preferencia pueden consistir en un piñón asociado al grupo de anillos de rueda al que se transfiere movimiento desde un motor por medio de una cadena, estando el motor controlado electrónicamente, pero que en otras versiones alternativas, estos medios de transmisión pueden incluir correas (dentadas o no), piñones, engranajes, etc. El soporte de rueda incluye además medios de amortiguación, realizados a base del muelles, que aseguran el contacto permanente de la rueda con la superficie de desplazamiento, sin pérdida de tracción, y cuyo diseño es tal que este apoyo está garantizado con diferentes niveles de peso, es decir, en carga y en vacío.
Con esta disposición, el conjunto está capacitado para la realización de movimientos precisos giratorios sobre cualquier punto, longitudinales, transversales o combinados para el desplazamiento del conjunto en cualquier dirección, en espacios mucho más reducidos que los necesitados por los vehículos actualmente existentes.
Breve descripción de los dibujos
Estas y otras características y ventajas de la invención se pondrán más claramente de manifiesto a partir de la descripción detallada que sigue de un ejemplo de realización preferida de la misma, dado únicamente a titulo ilustrativo y no limitativo, con referencia a los dibujos que se acompañan, en los que:
La Figura 1(a-b) muestra sendas vistas en alzado extremo y lateral de un rodillo de los incluidos en los grupos de rueda;
La Figura 2 es una vista, ligeramente en perspectiva, de un disco convencional dotado de aberturas receptoras de rodillos en su periferia;
La Figura 3 es una representación en alzado del disco o anillo de la Figura 2, con los rodillos ya insertados en las aberturas de su periferia, según la construcción convencional;
La Figura 4 muestra una vista en planta de una rueda en la que, según la invención, intervienen cuatro anillos adyacentes, solidarizados entre si, como el mostrado en la Figura 3;
La Figura 5 es una vista en alzado lateral de una rueda según la Figura 4, dotada de un medio lateral de arrastre, materializado a modo de piñón;
La Figura 6 ilustra una vista en planta inferior de un grupo de rueda con cuatro discos acoplados, adyacentes, montado en una envolvente de rueda;
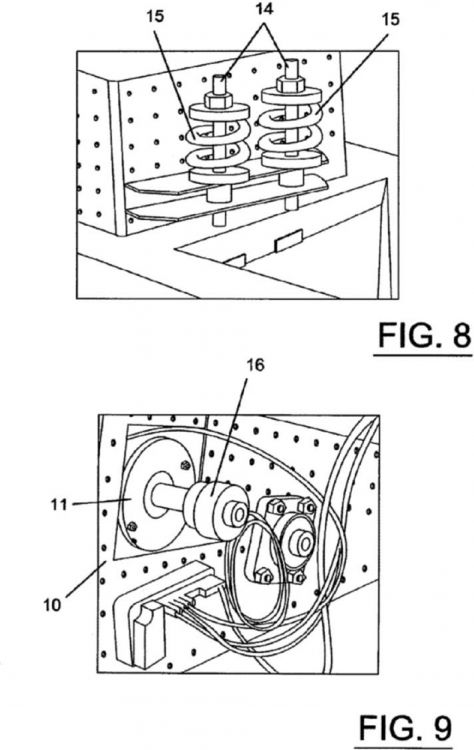
Las Figuras 7 y 8 muestran vistas esquemáticas de los medios de amortiguación diseñados para su montaje en cada grupo de rueda de la Figura 6, y
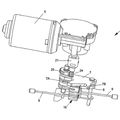
La Figura 9 ilustra un detalle lateral del grupo de rueda de la Figura 6.
Descripción de una forma de realización preferida
Tal y como se ha mencionado en lo que antecede, la descripción detallada de la forma de realización preferida del objeto de la invención, va a ser llevada a cabo en lo que sigue con la ayuda de los dibujos anexos, a través de los cuales se utilizan iguales referencias numéricas para designar las partes iguales o equivalentes. Así, atendiendo en primer lugar a las representaciones de la Figura 1, se pueden apreciar dos vistas esquemáticas identificadas como (a) y (b), tomadas en alzado desde posiciones extrema y lateral, respectivamente, ilustrativas de la constitución de uno cualquiera de los rodillos que intervienen en la construcción de una rueda para la estructura de la invención, y que según es convencional, consiste en un cuerpo 1 de revolución, delimitado por arista curvo-convexa, con un orificio 2 longitudinal pasante en posición axial, centrada, y dotado de medios adecuados para facilitar el movimiento de rotación del rodillo, tal como un casquillo o un rodamiento 3, según convenga.
De acuerdo con la configuración adoptada por este tipo de rodillo, se comprende que el mismo ejerce dos funciones fundamentales una vez montado en el conjunto de una rueda: por una parte, la curvatura de la arista longitudinal ayuda a recrear la forma circular general de la rueda en la que se monte, y por otra parte, permite el desplazamiento del conjunto en la dirección transversal.
De acuerdo con la forma de montaje convencional, los...
Reivindicaciones:
1. Estructura de soporte para vehículo omnidireccional con control automático de su movimiento, en particular una estructura de soporte diseñada para la implementación de un vehículo capacitado para realizar cualquier movimiento de giro sobre cualquier punto o cualquier desplazamiento tanto en dirección longitudinal como transversal de forma autónoma, sin necesidad de persona alguna y en un espacio realmente reducido, caracterizada porque la estructura de soporte incluye como elementos de desplazamiento el montaje de cuatro grupos de rueda omnidireccional de rodillos (1), medios electrónicos de control y medios mecánicos de sustento, con la particularidad de que cada grupo de rueda está constituido preferentemente por cuatro discos o anillos (4) de rodillos posicionados mutuamente adyacentes, vinculados por medio de tornillos (17) o similares, que pasan a través de orificios (7) y posicionados alternativamente desfasados de modo que los rodillos (1) de discos o anillos adyacentes quedan situados al tresbolillo.
2. Estructura según la reivindicación 1, caracterizada porque cada grupo de rueda está alojado en el interior de una envolvente (10) metálica, en cuyo espacio interior se alojan además medios de arrastre de rueda, constituidos por un órgano motriz tal como un motor (11) de accionamiento controlado electrónicamente, y elementos de transmisión de movimiento hasta el grupo de rueda, consistentes en una cadena (12) engranada en un piñón (9) solidario con el grupo de rueda.
3. Estructura según la reivindicación 2, caracterizada porque, alternativamente, los medios de transmisión de movimiento desde el órgano motriz pueden incluir correas dentadas o no dentadas, cadenas, piñones, grupos de engranajes, o cualquier otro apropiado.
4. Estructura según la reivindicación 2 ó 3, caracterizada porque el motor (11) incluye un variador de velocidad y un encóder de control.
5. Estructura según una o más de las reivindicaciones 1 a 4, caracterizada porque incluye además medios de amortiguación asociados a cada grupo de rueda, destinados a garantizar el correcto apoyo de la rueda sobre la superficie de desplazamiento con independencia del nivel de carga de la estructura, montados sobre la envolvente (10) metálica respectiva, y constituidos por un número de vástagos (14) insertados en el interior de muelles (15) respectivos.
Patentes similares o relacionadas:
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Aparato de control de frenado de un vehículo y método de control de frenado para el mismo, del 23 de Noviembre de 2018, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control de frenado de un vehículo que lleva a cabo frenado por fricción, mediante un dispositivo de frenado por fricción, y frenado regenerativo, […]
Estructura de disposición de sensor de ángulo de inclinación para vehículos, del 27 de Septiembre de 2017, de HONDA MOTOR CO., LTD.: Un vehículo que tiene al menos tres ruedas y una estructura de disposición de sensor de ángulo de inclinación , incluyendo dicho vehículo una pluralidad de […]
Sistema impulsor híbrido, del 25 de Mayo de 2016, de Shanghai E-propulsion Auto Technology Co., Ltd: Un sistema impulsor híbrido para vehículo, que comprende un motor de tracción principal , un arranquegenerador integrados , un motor , un […]
 Dispositivo de conducción para la mejora de la motricidad de un vehículo, del 25 de Julio de 2012, de PEUGEOT CITROEN AUTOMOBILES SOCIETE ANONYME: Dispositivo de conducción de vehículo, especialmente de un vehículo automóvil con dos ruedas motrices, quemarcha sobre una carretera o terreno, […]
Dispositivo de conducción para la mejora de la motricidad de un vehículo, del 25 de Julio de 2012, de PEUGEOT CITROEN AUTOMOBILES SOCIETE ANONYME: Dispositivo de conducción de vehículo, especialmente de un vehículo automóvil con dos ruedas motrices, quemarcha sobre una carretera o terreno, […]
SISTEMA DE CONTROL DE FUNCIONAMIENTO DE MEDIOS DE MOTORIZACIÓN HÍBRIDA PARA VEHÍCULO AUTOMÓVIL, del 30 de Enero de 2012, de PEUGEOT CITROEN AUTOMOBILES SA: Sistema de control del funcionamiento de medios de motorización híbrida para vehículo automóvil, que comprende al menos un motor térmico adaptado […]
 DISPOSITIVO DE ACCIONAMIENTO SELECTIVO, del 1 de Junio de 2008, de PIAGGIO & C. S.P.A.: Dispositivo de accionamiento que comprende un accionador que acciona una palanca de accionamiento , caracterizado porque dicha palanca comprende por lo menos […]
DISPOSITIVO DE ACCIONAMIENTO SELECTIVO, del 1 de Junio de 2008, de PIAGGIO & C. S.P.A.: Dispositivo de accionamiento que comprende un accionador que acciona una palanca de accionamiento , caracterizado porque dicha palanca comprende por lo menos […]
 SISTEMA DE CONTROL DE VEHICULOS CON SENSOR INCORPORADO PARA LA DETECCION DE FALLOS EN EL PEDAL DEL ACELERADOR, del 1 de Febrero de 2008, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Dispositivo de control adaptado para ser instalado en un vehículo híbrido para controlar un estado de marcha de un vehículo híbrido, que comprende equipos generadores de […]
SISTEMA DE CONTROL DE VEHICULOS CON SENSOR INCORPORADO PARA LA DETECCION DE FALLOS EN EL PEDAL DEL ACELERADOR, del 1 de Febrero de 2008, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Dispositivo de control adaptado para ser instalado en un vehículo híbrido para controlar un estado de marcha de un vehículo híbrido, que comprende equipos generadores de […]