PROCEDIMIENTO PARA EL MANEJO DE UNA TRAMPILLA MONTACARGAS.
Procedimiento para el manejo de una trampilla montacargas, especialmente para un vehículo con una plataforma (4),
la cual está unida con un dispositivo para ascender/descender a través de al menos un brazo portante (3), en cuyo caso la plataforma (4) con el brazo portante (3) forma un eje giratorio (B) y dicho brazo portante (3) forma un eje basculante (A) con el dispositivo para ascender/descender, y al eje giratorio (B) y al eje basculante 8 (A) está asignado un propulsor (1, 2), el cual está conectado con el sistema de control, en cuyo caso en el propulsor (1, 2) se recogen las señales que tienen la función de dirigir y/o supervisar y controlar la trampilla montacargas, caracterizado en que, se calcula un peso (P) de una carga (5) encima de la plataforma (4) en base al momento (M1, M2) de los dos propulsores (1, 2) y la distancia (K) entre ellos
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/000032.
B60P1/44TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60VEHICULOS EN GENERAL. › B60P VEHICULOS ADAPTADOS AL TRANSPORTE DE CARGAS O PARA TRANSPORTAR, LLEVAR O CONTENER CARGAS U OBJETOS PARTICULARES (vehículos adaptadas para transportar personas enfermas o inválidas, o sus medios personales de transporte A61G 3/00). › B60P 1/00 Vehículos destinados principalmente al transporte de cargas y modificados para facilitar la carga, la fijación de la carga o su descarga (vehículos para transportar las cosechas con medios incorporados para la carga o descarga A01D 90/00; particularidades de los vehículos de recogida de basuras B65F; carga o descarga de vehículos por medios no integrados en ellos B65G). › teniendo una plataforma de carga que eleva la carga al nivel del elemento soportante o contenedor de la carga.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
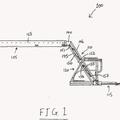
Procedimiento para el manejo de una trampilla montacargas El presente invento se refiere a un procedimiento para el manejo de una trampilla montacargas, especialmente para un vehículo con una plataforma, la cual está unida con un dispositivo para ascender/descender a través de al menos un brazo portante, en cuyo caso la plataforma con el brazo portante forma un eje giratorio y dicho brazo portante forma un eje basculante con el dispositivo para ascender/descender, y al eje giratorio y al eje basculante está asignado un propulsor, el cual está conectado con el sistema de control, en cuyo caso en el propulsor se recogen las señales que tienen la función de dirigir y/o supervisar y controlar la trampilla montacargas. ESTADO DE LA TECNOLOGÍA Una trampilla montacargas adecuada para el presente procedimiento está descrita, por ejemplo, en la WO 2006/133964. Esta trampilla montacargas presenta una plataforma, la cual está unida con un dispositivo para ascender/descender a través de un brazo portante y está accionada por medio de un motor. Aunque se desea hacer referencia expresa a este documento, no debe entenderse como una limitación para el presente invento. OBJETIVO El objetivo del presente invento es crear un procedimiento de la manera anteriormente descrita para accionar una trampilla montacargas, con la cual se puede mejorar tanto el manejo de la trampilla montacargas como realizar funciones adicionales a través de dicha trampilla montacargas. Al mismo tiempo el peso de una carga encima de una plataforma debe ser determinado con mayor facilidad. CONSECUCIÓN DEL OBJETIVO La consecución del objetivo conlleva que el peso de una carga encima de una plataforma se determine en base al momento de los dos propulsores y a su distancia entre sí. En el centro del presente invento se encuentra también la posibilidad de mejorar el manejo de una trampilla montacargas a través de la propulsión y realizar la trampilla montacargas de una forma más funcional. Es cierto, por ello, que se prefiere la utilización de un motor eléctrico ya que a través de la toma de corriente, al funcionar el motor eléctrico, se pueden generar señales, pero sin embargo el presente invento no está limitado al uso del mismo. Dentro del marco del presente invento se encuentran también motores giratorios hidráulicos y neumáticos, y otros motores ya conocidos. Bajo el término propulsor tampoco se incluyen únicamente motores, sino también otros elementos de movimientos, con los cuales se mueve la plataforma, o bien toda la trampilla montacargas. Por supuesto a ello pertenecen también los conocidos cilindros de presión y/o tracción. Éstos pueden ser accionados de forma hidráulica, neumática o eléctrica. La primera utilización de señales de propulsión se refiere a la regulación/ajuste de la plataforma con respecto al vehículo después del montaje. Se piensa aquí, por ejemplo, en una regulación del plano vertical de la plataforma en relación a la apertura de carga del vehículo. La plataforma debe estar tan próxima al vehículo como sea posible, o bien cerca del borde de apertura, con el fin de cerrarlo tan estanco como posible y evitar también que golpeen repetidamente durante el trayecto. En este caso, por ejemplo, se puede limitar la toma de corriente a un valor predeterminado al cerrar la plataforma, con el cual se asegura que la plataforma cierre el agujero. También se puede determinar una posición horizontal de la plataforma mediante señales, las cuales pueden ser tomadas en el propulsor. Al propulsor puede estar asignado por ejemplo un transmisor de impulsos incremental, el cual determina exactamente una posición de 90º con respecto a la vertical, en cuyo caso la vertical, tal y como ha sido descrito anteriormente, ha sido limitada previamente mediante la toma de corriente correspondiente. Con el fin de que todo el ajuste del movimiento de la plataforma también pueda tener lugar de modo automático, una función de aprendizaje y enseñanza debe estar integrada en el software correspondiente del sistema de control. Otra idea del presente invento consiste en controlar el funcionamiento de la plataforma del modo más exacto posible. Para ello se ha considerado que la plataforma y el propulsor que le ha sido asignado se encarguen de una función de pesado. Mediante esta función de pesado se calcula el peso de la cargaEn lo que se refiere a la frecuencia de la carga se puede controlar entonces el funcionamiento de la plataforma. Los parámetros también dan indicaciones sobre la necesidad de un mantenimiento o incluso de un cambio después de un número suficiente de ciclos de carga en relación a la carga superada por la plataforma. Para determinar el peso de la carga, conforme al presente invento, se determina solamente la longitud del brazo portante entre los dos ejes, o bien propulsor y el correspondiente momento de giro de los propulsores. Con ello se 2 realiza la determinación del peso independientemente de la distancia del peso hacia el eje de giro. Por supuesto, todas las señales y parámetros pueden ser almacenados dentro de un chip de memoria en el sistema de control y, en cuanto se desee, también pueden ser representados de formas gráficas e incluso ser evaluados gráficamente. Otra ventaja del propulsor tiene lugar especialmente en el caso de que se utilice un motor eléctrico. En el caso de un motor eléctrico se puede utilizar su característica de marcha rápida para una apertura rápida de la plataforma y para el funcionamiento en ralentí. De este modo se ahorra sustancialmente tiempo. En este caso, sin embargo, cada una de las diferentes posiciones puede ser alcanzada de forma extraordinariamente exacta a diferencia de cuando se usa una propulsión hidráulica. Pero esto no significa que el presente invento esté limitado a tracción delantera. Por ejemplo, la determinación del peso en base al momento también es posible con otros motores, aunque con un mayor gasto. Es el caso especialmente de los motores servo, como por ejemplo motores hidráulicos. Las correspondientes señales de propulsión también pueden ser utilizadas para la supervisión de seguridad de la plataforma. Para ello, no solamente se ha previsto asignar a la plataforma un sensor de movimiento, un sensor de ultrasonido o un sensor de temperatura, sino controlar también con la máxima exactitud posible la toma de corriente de un motor eléctrico en su funcionamiento de descenso. Durante este proceso de descenso se produce un aumento en la toma de corriente, lo cual es un indicio de que un obstáculo, por ejemplo una persona, se encuentra en medio del recorrido. En este instante puede pararse inmediatamente el descenso, en cuyo caso el proceso de parada no puede ser suprimido sino manualmente por una persona . Preferiblemente, el manejo de la trampilla montacargas conforme al invento debe realizarse a través de una pantalla táctil, en cuyo caso se suprime el habitual hardware operativo ya conocido. DESCRIPCIÓN DE FIGURAS Otras ventajas, características y detalles del presente invento resultan de la siguiente descripción de ejemplos preferidos de ejecución, así como también del dibujo; el cual muestra en su única figura una vista lateral representada esquemáticamente de una trampilla montacargas conforme al invento. Para simplificar la descripción de esta trampilla montacargas se hace referencia a la WO2006/133964. En este caso la trampilla montacargas posee dos ejes giratorios A, B, a cada uno de los cuales está asignado un motor 1, o bien 2. A continuación del eje A con el motor 1 se encuentra un brazo portante 3, el cual también puede ser realizado de varias piezas. Dicho brazo sujeta en el otro extremo el eje B, al cual está asignado el motor B. Por ejemplo, el motor 2, al igual que el motor 1, puede estar integrado en el eje B, o bien en el A. A través del motor 2 se gira una plataforma 4, mientras el motor 1 gira toda la unidad que consiste en el brazo portante 3, el eje B y la plataforma 4. Una longitud de brazo portante K se determina entre los ejes A y B. Además, una carga 5 mantiene una distancia de carga a desde el eje B. La carga 5 se encuentra encima de la plataforma 4. Además, a cada uno de los motores 1 y 2 están asignados dispositivos, con los cuales se puede determinar sus momentos. Éstos se identifican con M1 y M2 y son conducidos hacia una unidad de evaluación como señales. Además, la carga 5 presenta un peso P. A mayores actúa un peso P1 del eje B. El objetivo es, entonces, determinar el peso P de la carga 5, lo que se consigue por medio de las siguientes fórmulas: M1 = P (K +a) M1 = PK + Pa Pa = M1 PK a = M1 PK P M2 = P a a = M2 P 3 M2 = M1 - PK P P M2 = M1 PK M1 = M2 + PK PK = M1 M2 P = M1 M2 K Esto significa que para la determinación del peso únicamente hacen falta los momentos M1 y M2 de los motores y la longitud del brazo portante K. Es por ello que la determinación... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el manejo de una trampilla montacargas, especialmente para un vehículo con una plataforma (4), la cual está unida con un dispositivo para ascender/descender a través de al menos un brazo portante (3), en cuyo caso la plataforma (4) con el brazo portante (3) forma un eje giratorio (B) y dicho brazo portante (3) forma un eje basculante (A) con el dispositivo para ascender/descender, y al eje giratorio (B) y al eje basculante 8 (A) está asignado un propulsor (1, 2), el cual está conectado con el sistema de control, en cuyo caso en el propulsor (1, 2) se recogen las señales que tienen la función de dirigir y/o supervisar y controlar la trampilla montacargas, caracterizado en que, se calcula un peso (P) de una carga (5) encima de la plataforma (4) en base al momento (M1, M2) de los dos propulsores (1, 2) y la distancia (K) entre ellos. 2. Procedimiento conforme a la reivindicación 1, caracterizado en que después de la instalación tiene lugar un reglaje/ajuste de la plataforma (4) con respecto al vehículo y/o con respecto a una zona plana para descender por medio de las señales del propulsor a través del control. 3. Procedimiento conforme a la reivindicación 2, caracterizado en que una función de enseñanza/aprendizaje estará integrada en la programación del sistema de control. 4. Procedimiento conforme con una de las reivindicaciones 1 hasta 3, caracterizado en que a partir del consumo de la corriente por parte de un motor eléctrico (1, 2) se cierra una posición de la plataforma (4). 5. Procedimiento conforme con al menos una de las reivindicaciones 1 hasta 4, caracterizado en que al menos un parámetro de carga, especialmente la frecuencia de la carga y el peso de las cargas, serán grabados en una memoria y, si es preciso, evaluados gráficamente. 6. Procedimiento conforme con al menos una de las reivindicaciones 1 hasta 5, caracterizado en que el propulsor (1, 2) será utilizado con propiedades de alta velocidad, al menos al abrir la plataforma (4) o en el caso de que el funcionamiento se realice en vacío. 7. Trampilla montacargas, especialmente para vehículos, con una plataforma (4), especialmente para un vehículo con una plataforma (4), la cual está unida con un dispositivo de ascender/descender a través de al menos un brazo portante (3), en cuyo caso la plataforma (4) con el brazo portante (3) forma un eje giratorio (B) y el brazo portante (3) con el dispositivo de ascender/descender forma un eje basculante (A) y al eje giratorio (B) y al eje basculante 8 (A) está asignado un propulsor (1, 2), el cual está conectado con el sistema de control, caracterizado en que cada propulsor (1, 2) está conectado con un dispositivo para calcular el momento (M1, M2) de la propulsión (1, 2), y en cuyo caso la detección de la carga (5) colocada encima de la plataforma (4) tiene lugar conforme con al menos una de las reivindicaciones 1 hasta 6. 8. Trampilla montacargas conforme a la reivindicación 7, caracterizada en que el propulsor es un motor (1, 2) en funcionamiento eléctrico. 9. Trampilla montacargas conforme con una de las reivindicaciones 7 u 8, caracterizada en que el propulsor (1, 2) está integrado en el eje giratorio (B) y/o en el eje basculante (A). 10. Trampilla montacargas conforme con una de las reivindicaciones 7 hasta 9, caracterizada en que encima, al lado o en la plataforma (4) está previsto una marca y/o un dispositivo para fijar una distancia (a) definida de la carga (5) con respecto a una referencia predeterminada. 11. Trampilla montacargas conforme con al menos una de las reivindicaciones 7 hasta 10, caracterizada en que el manejo del sistema de control se realiza a través de una pantalla táctil. 6 REFERENCIAS CITADAS EN LA DESCRIPCIÓN La lista de referencias citada por el solicitante lo es solamente para utilidad del lector, no formando parte de los documentos de patente europeos. Aún cuando las referencias han sido cuidadosamente recopiladas, no pueden excluirse errores u omisiones y la OEP rechaza toda responsabilidad a este respecto. Documentos de patente citados en la descripción WO 2006133964 A [0002] [0016] 7
Patentes similares o relacionadas:
PLATAFORMA DE ELEVACIÓN PARA LA CARGA Y DESCARGA DE CILINDRO DE GAS, del 18 de Junio de 2020, de UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA: Una plataforma de elevación para la carga y descarga de cilindros y/o carros de carga, que comprende: un eje con un extremo inferior y un […]
Un dispositivo para soportar cargas, del 27 de Noviembre de 2019, de HPG AS: Un dispositivo de elevación y descenso para soportar carga, donde el dispositivo de elevación y descenso comprende una primera viga y una segunda viga , donde un […]
REMOLQUE CON PLATAFORMA DESCENDENTE, del 29 de Agosto de 2019, de PARRAMON CORRALES, Antonio: Remolque con plataforma descendente que presenta una estructura en forma de horquilla con ruedas situadas en el lado exterior de cada […]
DISPOSITIVO DE CAMBIO DE NEUMÁTICOS MONTADO SOBRE UN VEHÍCULO, del 15 de Agosto de 2019, de Aguado Automocion, S.A: La presente invención se refiere a un dispositivo móvil de cambio de neumáticos que comprende una bomba neumohidráulica, donde la bomba neumohidráulica lleva a […]
MÓDULO DE TRANSPORTE, VEHÍCULO AUTOPROPULSADO Y USO DE DICHO MÓDULO DE TRANSPORTE, del 12 de Enero de 2017, de EUROMOBILITY, S.L: Módulo de transporte para personas de movilidad reducida, susceptible de instalarse sobre un vehículo, siendo el vehículo de los que comprende un chasis con un emplazamiento […]
Contenedor de camión elevable para abastecimiento de aviones, del 29 de Diciembre de 2016, de TALLERES JOFRAUTO, S.L: 1. Contenedor de camión elevable para abastecimiento de aviones; del tipo que comprenden un chasis rodante con pies estabilizadores extensibles, en el que se encuentra […]
Aparato elevador para un vehículo, del 24 de Febrero de 2016, de PASSENGER LIFT SERVICES LIMITED: Aparato elevador para un vehículo que comprende una plataforma elevadora y un conjunto de conexión móvil, comprendiendo el conjunto de conexión móvil […]
DISPOSITIVO PARA ELEVAR Y VACIAR CONTENEDORES EN CAMION RECOLECTOR, del 31 de Octubre de 2014, de DASTIS MARTIN, Jose Antonio: 1. Dispositivo para elevar y vaciar contenedores en camión recolector caracterizado por constituirse a partir de los siguientes elementos:
1) Cuerpo de accionamiento, […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Aparato elevador para un vehículo, del 24 de Febrero de 2016, de PASSENGER LIFT SERVICES LIMITED: Aparato elevador para un vehículo que comprende una plataforma elevadora y un conjunto de conexión móvil, comprendiendo el conjunto de conexión móvil […]
Aparato elevador para un vehículo, del 24 de Febrero de 2016, de PASSENGER LIFT SERVICES LIMITED: Aparato elevador para un vehículo que comprende una plataforma elevadora y un conjunto de conexión móvil, comprendiendo el conjunto de conexión móvil […]