CAPTADOR DE POSICIÓN CON DIRECCIÓN DE IMANTACIÓN VARIABLE Y PROCEDIMIENTO DE REALIZACIÓN.
Captador magnético de desplazamiento rotativo, lineal o curvilíneo,
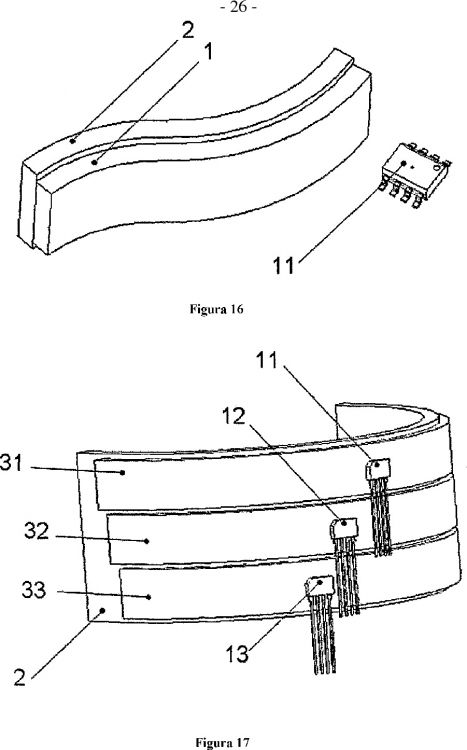
que utiliza, al menos, un imán permanente (1, 31, 32, 33) y, al menos, un elemento magnetosensible (11, 12, 13, 81), móviles el uno con relación al otro, según una dirección de desplazamiento (5) del imán (1, 31, 32, 33), caracterizado porque el imán (1, 31, 32, 33) presenta una dirección de imantación, que varía sensiblemente de forma lineal según dicha dirección de desplazamiento (5) del imán (1, 31, 32, 33) sobre una superficie definida por dicha dirección de desplazamiento (5) y una dirección normal, con exclusión de una imantación diametral en el caso de un captador rotativo, engendrando dicho imán permanente (1, 31, 32, 33), de este modo, un campo magnético, cuya componente normal (Y) por una parte y, al menos, una de las componentes tangencial (X) y transversal (Z), por otra parte, medidas en la superficie del imán, varían periódicamente de forma sinusoidal, variando las componentes normal (Y) y transversal (Z) con la misma fase cuando la componente tangencial (X) está desfasada un cuarto de período
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2007/000382.
Solicitante: MOVING MAGNET TECHNOLOGIES "M.M.T.".
Nacionalidad solicitante: Francia.
Dirección: 1, RUE CHRISTIAAN HUYGENS, ZAC LAFAYETTE 25000 BESANCON FRANCIA.
Inventor/es: JERANCE,NIKOLA, ARLOT,RICHARD.
Fecha de Publicación: .
Fecha Solicitud PCT: 2 de Marzo de 2007.
Fecha Concesión Europea: 21 de Julio de 2010.
Clasificación Internacional de Patentes:
- G01D5/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00).
Clasificación PCT:
- G01B7/00 G01 […] › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos.
- G01D5/16 G01D […] › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › mediante la variación de resistencia.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La presente invención se refiere al campo de los captadores de posición magnéticos que comprende, al menos, un imán permanente.
La presente invención se propone utilizar de una manera más particular un imán permanente, que comprende una dirección de imantación variable, según la dirección del desplazamiento.
Los captadores, que detectan la posición a partir de un campo magnético, tienen numerosas ventajas:
• no existe contacto mecánico con la parte móvil y, por lo tanto, no hay desgaste,
• son insensibles a la suciedad,
• el coste de producción es reducido,
• la duración de vida es prolongada.
De la misma manera, es interesante eliminar (si es posible) los inconvenientes que se presentan en ciertos captadores magnéticos, tales como la dependencia de la histéresis debido a las piezas ferromagnéticas y a la inducción remanente del imán permanente (esta inducción depende también de las variaciones de temperatura y en ciertos casos debe ser compensada, y así mismo disminuye de manera irreversible en el tiempo como consecuencia del envejecimiento del imán).
En el estado de la técnica, la patente FR2691534, se conocía un captador de posición lineal, pero el tamaño y la longitud del imán utilizado limitan la utilización práctica de este captador para las trayectorias grandes. De la misma manera, este captador presenta una histéresis debida a los estatores ferromagnéticos y la medición depende de la variación de la inducción remanente, que debe ser compensada.
De la misma manera, se conoce por la patente US06211668 un captador de posición lineal, pero la variación de campo magnético en este captador está directamente relacionada con las dimensiones, lo que limita su realización práctica para grandes trayectorias. Este captador también mide la intensidad del campo magnético, lo que le hace dependiente de la variación de la inducción remanente del
- 2
imán permanente con relación a la temperatura y al tiempo.
Se conocen en el estado de la técnica, las patentes US6731108, US6960974 y WO2004/01537 que permiten llevar a cabo la medición del desplazamiento lineal de un imán con relación a uno o a varios elementos magnetosensibles. Sin embargo, para una realización práctica de las trayectorias mayores que 20-25 mm, estos captadores necesitan varias sondas colocadas sobre las diferentes partes de la trayectoria, lo que aumenta el coste del captador y necesita un posicionamiento preciso de las sondas.
Por otra parte, el documento nº US 6,545,463 describe un captador de desplazamiento, en el que el imán presenta una dirección de imantación que pertenece a un plano de sección del imán y que es perpendicular a la dirección de desplazamiento de la medición. El documento nº EP 1074 818 presenta un captador de desplazamiento, en el que el imán presenta una dirección de imantación que varía de forma no lineal. Y el documento nº WO 00/04339 presenta un captador de desplazamiento, que presenta una pluralidad de imanes dotados con una imantación tradicional.
Estas realizaciones no permiten llevar a cabo la medición de un desplazamiento sobre grandes trayectorias lineales o angulares.
La presente invención se propone remediar de forma total o parcial los problemas que han sido citados más arriba, proponiendo un captador magnético de desplazamiento rotativo, lineal o curvilíneo, que utiliza, al menos, un imán permanente y, al menos, un elemento magnetosensible, móviles el uno con relación al otro, caracterizado porque el imán presenta una dirección de imantación que varía sensiblemente de forma lineal según la dirección de desplazamiento del imán sobre una superficie definida por dicha dirección de desplazamiento y una dirección normal, con exclusión de una imantación diametral en el caso de un captador rotativo.
De manera preferente, el imán está constituido por un imán que engendra un campo magnético, cuya componente normal (Y), por una parte, y, al menos, una de las componentes tangencial (X) o transversal (Z), por otra parte, medidas en la superficie del imán, varía periódicamente con N períodos sobre la trayectoria de desplazamiento, siendo N un número entero.
- 3 La invención se refiere, según un modo de realización preferente, a un captador de gran trayectoria lineal. Con esta finalidad, se utiliza un imán móvil de longitud correspondiente sensiblemente a la trayectoria útil, cuya imantación varía de manera sensiblemente lineal según la dirección de desplazamiento. Esta imantación 5 engendra, en las proximidades de este imán, un campo magnético, cuyas componentes tangencial (X), normal (Y) y transversal (Z), con relación al imán, son sensiblemente sinusoidales, sobre una gran parte de la trayectoria. Los componentes Y y Z tienen la misma fase, mientras que la componente X está desfasada un cuarto de período. 10 Si se lleva a cabo la medición de las componentes X y Y en un punto del espacio que circunde al imán, es posible conocer la posición lineal del imán, aplicando la fórmula siguiente:
**(Ver fórmula)**
en la que: x - posición lineal, Bx -componente tangencial del campo magnético, Bx max - amplitud de Bx, By -componente normal del campo magnético, By max - amplitud de By, En un caso más general, se puede utilizar la fórmula siguiente:
**(Ver fórmula)**
en la que: x - posición lineal, Bx -componente tangencial del campo magnético, Bx max - amplitud de Bx, Byzmax - amplitud de Byz con
**(Ver fórmula)**
donde:
- 4 By -componente normal del campo magnético, Bz - componente transversal del campo magnético. En un caso general, la decodificación de la posición lineal del imán, a partir de estas dos componentes, cuyas amplitudes son, en general, diferentes, necesita normalizar las dos componentes utilizadas para poder llevar a cabo el cálculo del arco tangente para deducir a partir del mismo la posición lineal. Estas funciones de arco tangente y de normalización se llevan a cabo bien por un elemento separado o directamente por una sonda (por ejemplo: MELEXIS 90316) que integra la medición de las dos componentes del campo, el cálculo del arco tangente y la normalización de las dos componentes del campo. Es posible llevar a cabo desarrollos particulares en los que Bxmax y Byzmax tuviesen sensiblemente los mismos valores, eligiéndose, de manera conveniente, la posición y la orientación de la sonda. En el presente captador, es posible obtener el ángulo del campo magnético proporcional al desplazamiento, es suficiente con inclinar el plano de medición con relación al plano de imantación. De esta manera se tiene: Byl = By cos(θ) – Bz sen(θ)
Bxl = Bx donde
Bx1, By1 - componentes de la inducción magnética en el plano de medición,
Bx -componente tangencial de la inducción magnética,
By -componente normal de la inducción magnética,
Bz - componente axial de la inducción magnética,
θ - ángulo de inclinación de la sonda.
Ahora nos proponemos aplicar la misma fórmula, pero con las componentes del campo en el plano de medición:
**(Ver fórmula)**
donde
X - desplazamiento lineal o rotativo medido,
Bx1, By1 - componentes de la inducción magnética en el plano de medición,
g -ganancia que permite compensar la diferencia de las amplitudes.
Esta configuración permite regular la ganancia a ser aplicada antes del cálculo
- 5
del arco tangente.
Si las amplitudes de las dos componentes del campo magnético en el plano de medición Bx1, By1 son iguales, estas señales representan dos sinusoides en cuadratura, por lo que el ángulo del campo medido sigue al desplazamiento.
De este modo es posible, ajustando el ángulo de inclinación θ, llevar a cabo la medición del desplazamiento directamente calculándose
**(Ver fórmula)**
sin aplicar una ganancia para compensar la diferencia de las amplitudes.
En el estado de la técnica, se conocen sondas magnetorresistivas que permiten llevar a cabo la medición del ángulo del campo magnético. Estas sondas comprenden dos puentes de Wheatstone, cuyas salidas, para una amplitud suficiente del campo magnético, dependen únicamente del ángulo del campo magnético, según la fórmula:...
Reivindicaciones:
1. Captador magnético de desplazamiento rotativo, lineal o curvilíneo, que utiliza, al menos, un imán permanente (1, 31, 32, 33) y, al menos, un elemento magnetosensible (11, 12, 13, 81), móviles el uno con relación al otro, según una dirección de desplazamiento (5) del imán (1, 31, 32, 33), caracterizado porque el imán (1, 31, 32, 33) presenta una dirección de imantación, que varía sensiblemente de forma lineal según dicha dirección de desplazamiento (5) del imán (1, 31, 32, 33) sobre una superficie definida por dicha dirección de desplazamiento (5) y una dirección normal, con exclusión de una imantación diametral en el caso de un captador rotativo, engendrando dicho imán permanente (1, 31, 32, 33), de este modo, un campo magnético, cuya componente normal (Y) por una parte y, al menos, una de las componentes tangencial (X) y transversal (Z), por otra parte, medidas en la superficie del imán, varían periódicamente de forma sinusoidal, variando las componentes normal (Y) y transversal (Z) con la misma fase cuando la componente tangencial (X) está desfasada un cuarto de período.
2. Captador magnético de desplazamiento según la reivindicación 1, caracterizado porque la superficie definida es un plano.
3. Captador magnético de desplazamiento según la reivindicación 2, caracterizado porque dicho imán permanente (1, 31, 32, 33) es un imán que engendra un campo magnético, cuya componente normal (Y), por una parte, y, al menos, una de las componentes tangencial (X) o transversal (Z), por otra parte, medidas en la superficie del imán, varían periódicamente con N períodos sobre la trayectoria de desplazamiento.
4. Captador magnético de desplazamiento según la reivindicación 3, caracterizado porque el período N de variación del campo magnético, engendrado en la superficie del imán (1, 31, 32, 33) es un número entero.
5. Captador magnético de desplazamiento según la reivindicación 3, caracterizado porque el período N de variación del campo magnético, engendrado en la superficie del imán (1, 31, 32, 33) es igual a 1.
6. Captador magnético de desplazamiento según al menos una de las reivindicaciones precedentes, caracterizado porque el desplazamiento es un desplazamiento lineal.
- 15
7. Captador magnético de desplazamiento según al menos una de las reivindicaciones precedentes, caracterizado porque el desplazamiento es un desplazamiento rotativo, que presenta una trayectoria diferente de 360º ± 5º.
8. Captador magnético de desplazamiento según al menos una de las reivindicaciones precedentes, caracterizado porque el desplazamiento es un desplazamiento curvilíneo.
9. Captador magnético de desplazamiento según al menos una de las reivindicaciones precedentes, caracterizado porque el imán (1, 31, 32, 33) está montado sobre una culata ferromagnética (31).
10. Captador magnético de desplazamiento según la reivindicación precedente caracterizado porque el imán (1, 31, 32, 33) está encastrado en una culata ferromagnética (31).
11. Captador magnético de desplazamiento según al menos una de las reivindicaciones precedentes, caracterizado porque el imán (1, 31, 32, 33) está realizado con un material flexible.
12. Captador magnético de desplazamiento según una de las reivindicaciones 5, 6 o 7, caracterizado porque el imán (1, 31, 32, 33) está montado sobre un soporte
(2) curvado o curvilíneo.
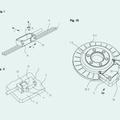
13. Captador magnético de desplazamiento según al menos una de las reivindicaciones precedentes, caracterizado porque comprende, al menos, dos elementos magnetosensibles (11, 12, 13, 81), que miden la componente del campo magnético tangente al sentido de desplazamiento y una combinación lineal de la componente normal y de la componente transversal del campo magnético según la dirección de desplazamiento (5).
14. Captador magnético de desplazamiento según la reivindicación precedente, caracterizado porque comprende un circuito de tratamiento de la señal, que realiza un cálculo de arco tangente utilizando dos señales eléctricas desfasadas 90º, que proceden de, al menos, dos de los elementos magnetosensibles (11, 12, 13, 81).
15. Captador magnético de desplazamiento según la reivindicación precedente, caracterizado porque el circuito de tratamiento de la señal permite un ajuste de las ganancias de las dos señales útiles para la decodificación del ángulo.
- 16 16. Captador magnético de desplazamiento según la reivindicación precedente, caracterizado porque el circuito de tratamiento de la señal permite una programación no lineal de la función de transferencia. 17. Captador magnético de desplazamiento según al menos una de las 5 reivindicaciones precedentes, caracterizado porque comprende varios imanes (1, 31, 32, 33) que definen varias pistas cada una de las cuales tiene una dirección de imantación continuamente variable según la dirección de desplazamiento. 18. Captador magnético de desplazamiento según al menos una de las reivindicaciones precedentes, caracterizado porque la dirección de imantación 10 presenta varios períodos sobre la trayectoria medida. 19. Captador magnético de desplazamiento según la reivindicación precedente, caracterizado porque comprende, al menos, dos períodos de imantación de longitud diferente. Siguen catorce hojas de dibujos.
Patentes similares o relacionadas:
Composiciones de elemento de detección y sistema de sensor para detectar y controlar estructura de hidrocarburos, del 12 de Junio de 2019, de 1835963 Alberta Ltd: Una composición para uso en un elemento de detección para uno o más de: (i) el control de fugas, (ii) un cambio estructural, y (iii) un cambio de temperatura en una estructura […]
Sistema y método para colaboración multimedia activada por biosensores, del 12 de Junio de 2019, de Mutualink Inc: Un sistema que comprende una primera agencia conectada a una Red de Área Personal, PAN , para un usuario a través de […]
Aparato de escala y de cabeza lectora, del 27 de Marzo de 2019, de RENISHAW PLC: Aparato para determinar la alineación angular de una cabeza lectora con respecto a una escala , comprendiendo el aparato al menos un sensor en la cabeza […]
 Dispositivo con una unidad de escaneo y un auxiliar de montaje, y un método para el montaje de la unidad de escaneo, del 20 de Enero de 2016, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo con una unidad de escaneo y un auxiliar de montaje para el ajuste de la unidad de escaneo , caracterizado por que el auxiliar […]
Dispositivo con una unidad de escaneo y un auxiliar de montaje, y un método para el montaje de la unidad de escaneo, del 20 de Enero de 2016, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo con una unidad de escaneo y un auxiliar de montaje para el ajuste de la unidad de escaneo , caracterizado por que el auxiliar […]
 Dispositivo para la identificación de puntos de medición electrónica, del 26 de Noviembre de 2015, de ELSTER MESSTECHNIK GMBH: Dispositivo para la identificación electrónica de los puntos de medición de contadores de consumo con al menos un contador de consumo para la indicación […]
Dispositivo para la identificación de puntos de medición electrónica, del 26 de Noviembre de 2015, de ELSTER MESSTECHNIK GMBH: Dispositivo para la identificación electrónica de los puntos de medición de contadores de consumo con al menos un contador de consumo para la indicación […]
Agrupación de sensores, del 7 de Mayo de 2014, de Moog Insensys Limited: Una agrupación de sensores de deformación de fibra óptica que tiene una dirección longitudinal y una dirección transversal, comprendiendo la agrupación: una […]
 Patrón de posicionamiento, del 27 de Noviembre de 2013, de GCODER SYSTEMS AB: Un sistema de detecciOn de posiciOn , para detectar la posicion de un objeto , comprendiendo el sistema:una agrupacion de patr6n que comprende […]
Patrón de posicionamiento, del 27 de Noviembre de 2013, de GCODER SYSTEMS AB: Un sistema de detecciOn de posiciOn , para detectar la posicion de un objeto , comprendiendo el sistema:una agrupacion de patr6n que comprende […]
Dispositivo de captación de imágenes para pistas de skate, del 24 de Octubre de 2013, de DE ANDRÉS MARTIN-CARO, Víctor Javier: 1. Dispositivo de captación de imágenes para pistas de skate que permite conocer lo que sucede en tiempo real en cada skatepark de un territorio […]