Patrón de posicionamiento.
Un sistema de detecciOn de posiciOn (1), para detectar la posicion de un objeto (2),
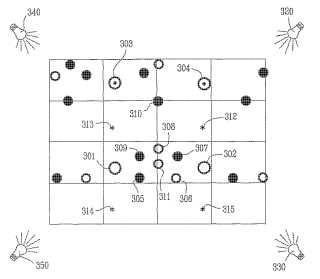
comprendiendo el sistema:una agrupacion de patr6n (4) que comprende al menos un punto de nodo (301 a 304) y al menos un puntode informacien (305 a 311) y estando dispuesta una pluralidad de dichas agrupaciones de patr6n directa oindirectamente sabre dicho objeto (2);
al menos un dispositivo de deteccion (3) para detectar dicho patron (4); y
un dispositivo computacional (200) que comprende medios para analizar senales para determinar posicionesde centros geornetricos en al menos dos direcciones de puntos de nodo (301 a 304) en dicha agrupacion depatron y determinar el tipo de punto y la posicion de puntos de informaciOn ubicados en dicho objeto (2);
estando dispuestos dichos puntos de nodo (301 a 304) para proporcionar una posicion con respecto a dichodispositivo de deteccion (3) y proporcionando dichos puntos de informacion (305 a 311) la ubicacion de dichopunto de nodo con respecto a dicho objeto.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2006/001136.
Solicitante: GCODER SYSTEMS AB.
Inventor/es: NILSAGÅRD,JONAS, TAKMAN,OLLE, STENBERG,MANNE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00).
- G01L3/12 G01 […] › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › G01L 3/00 Medida del par, del trabajo, de la potencia o del rendimiento mecánico en general. › que implican medios fotoeléctricos.
- G06F3/033 G […] › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 3/00 Disposiciones de entrada para la transferencia de datos destinados a ser procesados en una forma utilizable por el computador; Disposiciones de salida para la transferencia de datos desde la unidad de procesamiento a la unidad de salida, p. ej. disposiciones de interfaz. › Dispositivos de puntero desplazados o posicionados por el usuario; Sus accesorios (Digitalizadores caracterizados por el medio de transducción G06F 3/041).
PDF original: ES-2431632_T3.pdf
Fragmento de la descripción:
Patrón de posicionamiento
CAMPO TÉCNICO
La presente invención se refiere a un dispositivo, procedimiento y sistema para determinar la posición de un objeto y, en particular, a una solución visual que usa un patrón que comprende datos de posición absoluta.
ANTECEDENTES DE LA INVENCiÓN
Se han desarrollado muchos tipos diferentes de dispositivos de control con varios fines. El dispositivo de control más común es el denominado ratón, que proporciona variables de posicionamiento en dos dimensiones que se usan para controlar el funcionamiento de las aplicaciones de un ordenador. Otros dispositivos de control de interfaz incluyen la denominada palanca de mando, que también proporciona variables de posicionamiento en dos dimensiones a partir de la palanca; aunque el uso de botones adicionales junto con la palanca puede mejorar el número de "variables de posicionamiento", debe entenderse que este dispositivo solo mide físicamente variables de posicionamiento en dos dimensiones. Una bola de seguimiento también suministra datos en dos dimensiones; un mando para videojuegos usa normalmente una pequeña palanca de mando como asidero para medir variables de posicionamiento y puede ampliar el alcance de la funcionalidad del controlador a más datos de control utilizando botones adicionales; un volante (para videojuegos) suministra datos en una dimensión.
En muchas soluciones actuales, el dispositivo de control solo proporciona mediciones de referencia y no mediciones absolutas, lo que significa que para que una aplicación basada en coordenadas absolutas del dispositivo de control funcione correctamente, se necesita un cálculo complejo para realizar un seguimiento continuo de la ubicación del dispositivo de control. Sin embargo, tales dispositivos necesitan calibrarse regularmente, ya que de lo contrario acumularán continuamente un error que rápidamente puede hacerse critico dependiendo de la aplicación.
En otras áreas técnicas, aparte de los dispositivos de control mencionados anteriormente, también se usan datos de posicionamiento para determinar la posición de un objeto y en muchos casos se usan soluciones de mediciones absolutas, aunque normalmente son muy complejas y caras para usarse en aplicaciones de bajo coste. Los sistemas visuales se han utilizado anteriormente y usado frecuentemente con puntos de referencia, por ejemplo en sistemas de posicionamiento visuales para determinar la posición de vehiculos u objetos en movimiento. Estos sistemas pueden instalarse en el vehiculo u objeto que determina la posición usando puntos de referencia del área circundante o en una posición externa que determina la posición usando puntos de referencia en el vehículo u objeto. Estos sistemas son generalmente muy complejos y necesitan sistemas visuales de alta calidad y una gran capacidad computacional. Un sistema de este tipo se presenta en la patente estadounidense 5965879, donde se muestra un codificador óptico absoluto, lineal o giratorio, unidimensional. Esta solución usa marcadores fiduciales idénticos para hallar la posición de un objeto. La posición fiducial se calcula en una dirección, concretamente la dirección de desplazamiento. Otro sistema de este tipo se presenta en la patente estadounidense 6765195, donde se muestra un codificador óptico absoluto bidimensional. Esta solución usa dos marcadores fiduciales diferentes para determinar la posición de un objeto. Las marcas fiduciales son idénticas en todas las posiciones codificadas y están dispuestas de tal manera que son estrictamente periÓdicas en cada dirección de desplazamiento. Estos dos sistemas ilustran sistemas que necesitan soluciones ópticas complejas y en los que el tamano de los patrones es del orden de algunos micrómetros. No proporcionan información de curvatura o rotacional.
RESUMEN DE LA INVENCiÓN
Por lo tanto, un objeto de la presente invención es proporcionar un dispositivo preciso y de bajo coste que proporcione datos de posición absoluta con una tecnología relativamente económica y no compleja y que también pueda proporcionar información de posición incluso de tres o cuatro dimensiones (x, y, x y rotación) .
Esto se consigue en varios aspectos de la presente invención, definida en las reivindicaciones.
BREVE DESCRIPCiÓN DE LOS DIBUJOS
A continuación se describirá la invención de manera no limitativa y en mayor detalle con referencia a realizaciones a modo de ejemplo ilustradas en los dibujos adjuntos, en los que:
la Fig. 1 a ilustra una vista en sección transversal de un dispositivo de posicionamiento aplicado a una realización de la presente invención;
la Fig. 1 b ilustra una vista lateral de la realización de la Fig. 1a;
la Fig. 2 ilustra esquemáticamente un dispositivo de procesamiento según la presente invención; la Fig. 3 ilustra una vista detallada de un patrón de posicionamiento según la presente invención;
la Fig. 4 ilustra una aplicación de la presente invención;
la Fig. 5 ilustra otra aplicación de la presente invención;
la Fig. 6 ilustra esquemáticamente en un diagrama de bloques un procedimiento según la presente invención; y
la Fig. 7 ilustra otra realización de la presente invención.
DESCRIPCiÓN DETALLADA DE REALIZACIONES PREFERIDAS
En la Fig. 1, el número de referencia 1 denota de manera genérica un dispositivo de medición 1 visto desde una vista en sección transversal según una realización de la presente invención. El dispositivo 1 comprende un dispositivo de adquisición de imágenes 3 situado a cierta distancia de un objeto 2 de interés. El dispositivo 1 está formado por una carcasa 8 y por conectores eléctricos 9 y, opcionalmente, por una interfaz de control 10. En la Fig. 1, el objeto de interés es un árbol 2 y el dispositivo 1 está montado en el árbol 2 soportado por dos cojinetes 5 y 6. El dispositivo de adquisición de imágenes 3 está montado cerca de la superficie del objeto 2 y el dispositivo 1 puede estar dispuesto de tal manera que forma una cavidad 7 que puede estar sustancialmente sellada para reducir el riesgo de que entre suciedad u otros agentes perturbadores en la cavidad 7. La Fig. 1a es una vista en sección transversal de la realización mostrada en la Fig. 1b, la cual es una vista lateral de la realización.
Las señales procedentes del dispositivo de adquisición de imágenes 3 se transfieren a un dispositivo de procesamiento 200, ilustrado en la Fig. 2, a través de un conector 207, para el procesamiento de las imágenes y el acondicionamiento de las señales con el fin de proporcionar una señalo señales indicativas de la posición del objeto 2 a algún dispositivo extemo conectado al dispositivo de procesamiento usando un conector 203. El dispositivo de procesamiento puede incluir un procesador 201, una unidad (o unidades) de memoria 202, una unidad de procesamiento de imágenes 204 y otras unidades 205 y 206, dependiendo de la aplicación del dispositivo de medición 1. La unidad de procesamiento puede tener una interfaz de comunicaciones para comunicarse con dispositivos extemos o unidades opcionales acopladas al dispositivo de control 1. Tales unidades opcionales pueden incluir, pero sin limitarse a, dispositivos de retroalimentación de fuerza, de sujeción o dispositivos de interacción similares para interactuar con un usuario del dispositivo de control. Las interfaces para la comunicación con dispositivos externos o entradas de sensores internos pueden proporcionarse a través de cualquier conector o conectores adecuados conocidos por los expertos en la técnica, induyendo, pero sin limitarse a, USB (bus serie universal) , Firewire, RS232, RS485, Ethernet, puertos paralelos de Centronics, GPIB (bus de interfaz de propósito general) , diferentes interfaces inalámbricas (por ejemplo Bluetooth y WLAN) , etc. Todas las interfaces enumeradas se ajustan a interfaces estándar existentes, pero debe entenderse que también pueden incluirse soluciones estándar futuras o incluso interfaces propietarias.
El dispositivo de procesamiento 200 puede estar situado de manera conveniente dentro del propio dispositivo de medición o puede proporcionarse como un dispositivo autónomo extemo, dependiendo de la aplicación.
En la realización ilustrada en la Fig. 1, un dispositivo de adquisición de imágenes 3 se usa para obtener la posición del objeto 2; sin embargo, pueden utilizarse otros tipos de sensores que estén dispuestos para obtener datos de posicionamiento, por ejemplo un sensor magnético que adquiere posiciones de "puntos" magnéticos en el objeto 2.
Medios de detección de no contacto pueden utilizarse de manera ventajosa, ya que parte del objeto 2 está encapsulado dentro de la carcasa 8 del dispositivo de medición 1;... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de detección de posición (1) , para detectar la posición de un objeto (2) , comprendiendo el sistema:
una agrupación de patrón (4) que comprende al menos un punto de nodo (301 a 304) y al menos un punto de información (305 a 311) y estando dispuesta una pluralidad de dichas agrupaciones de patrón directa o indirectamente sobre dicho objeto (2) ; al menos un dispositivo de detección (3) para detectar dicho patrón (4) ; y un dispositivo computacional (200) que comprende medios para analizar señales para determinar posiciones de centros geométricos en al menos dos direcciones de puntos de nodo (301 a 304) en dicha agrupación de patrón y determinar el tipo de punto y la posición de puntos de información ubicados en dicho objeto (2) ; estando dispuestos dichos puntos de nodo (301 a 304) para proporcionar una posición con respecto a dicho dispositivo de detección (3) y proporcionando dichos puntos de información (305 a 311) la ubicación de dicho punto de nodo con respecto a dicho objeto.
2. El sistema de detección de posición (1) según la reivindicación 1, en el que dicho objeto (2) es un objeto tridimensional (2) .
3. El sistema de detección de posición (1) según cualquiera de las reivindicaciones 1 y 2, en el que dicha agrupación de patrón (4) está prevista sobre una superficie curva de dicho objeto (2) .
4. El sistema de detección de posición (1) según cualquiera de las reivindicaciones 1 a 3, en el que dos líneas (4, 4') de agrupaciones de patrón están dispuestas esencialmente en paralelo entre sí a una distancia (d) entre si en una dirección longitudinal de un árbol (2) .
5. El sistema de detección de posición (1) según la reivindicación 4, en el que están previstos dos dispositivos de detección (3) , donde cada uno lee una de dichas dos líneas (4, 4') de agrupaciones de patrón.
6. El sistema de detección de posición (1) según cualquiera de las reivindicaciones 1 a 5, que comprende además al menos un dispositivo de iluminación (320, 330, 340, 350) Y donde la iluminación es una de entre luz visible, luz infrarroja, luz de rayos x y luz ultravioleta.
7. El sistema de detección de posición (1) según la reivindicación 6, en el que la intensidad de iluminación de dicho dispositivo de iluminación (320, 330, 340, 350) es controlada por dicho dispositivo computacional (200) .
8. El sistema de detección de posición (1) según cualquiera de las reivindicaciones 1 a 7, en el que dichos puntos de nodo (301 a 304) y dichos puntos de información (305 a 311) comprenden al menos uno de entre un círculo relleno, un anillo o un anillo con una marca central.
9. El sistema de detección de posición (1) según cualquiera de las reivindicaciones 1 a 8, en el que al menos uno de dichos puntos de nodo (301 a 304) y dichos puntos de información (305 a 311) están codificados con color.
10. El sistema de detección de posición (1) según cualquiera de las reivindicaciones 1 a 9, en el que dicha agrupación de patrón (4) y dicho dispositivo de detección (3) están situados en un recinto que protege contra parámetros ambientales.
11. El sistema de detección de posición (1) según cualquiera de las reivindicaciones 1 a 10, en el que dicho dispositivo computacional (200) está dispuesto además para determinar las posiciones de centros geométricos de puntos de nodo (301 a 304) usando un algoritmo visual que usa un análisis de gradiente.
12. El sistema de detección de posición (1) según cualquiera de las reivindicaciones1 a 11, en el que el centro geométrico se determina para los puntos de nodo (301 a 304) y para los puntos de información (305 a 311) del patrón (4) .
13. El sistema de detección de posición (1) según cualquiera de las reivindicaciones 1 a 12, en el que los puntos de nodo (301 a 304) comprenden una pluralidad de diferentes tipos de puntos, por ejemplo, puntos rellenos, puntos no rellenos o puntos no rellenos que presentan un pequeño punto central.
14. El sistema de detección de posición (1) según la reivindicación 12, en el que el punto tiene una forma elegida de entre una forma circular, rectangular, cuadrática o triangular.
15. El sistema de detección de posición (1) según cualquiera de las reivindicaciones 1 a 14, en el que los puntos de información comprenden una pluralidad de diferentes tipos de puntos, por ejemplo puntos rellenos, puntos no rellenos o puntos no rellenos que presentan un pequeño punto central.
16. El sistema de detección de posición (1) según cualquiera de las reivindicaciones 1 a 15, en el que el dispositivo computacional (200) está dispuesto para determinar una distancia entre el objeto (2) y el dispositivo de detección (3) midiendo al menos uno de entre el tamaño de un punto de nodo (301 a 304) , el tamaño de un punto de información (305 a 311) , la distancia entre dos puntos de nodo (301 a 304) , la distancia entre dos puntos de información (305 a 311) y la distancia entre un nodo (301 a 304) y un punto de información (305 a 311) .
17. El sistema de detección de posición (1) según cualquiera de las reivindicaciones 1 a 16, en el que el dispositivo de detección (3) es un dispositivo de adquisición de imágenes (3) .
18. El sistema de detección de posición (1) según la reivindicación 17, en el que el dispositivo de adquisición de imágenes (3) es una cámara.
19. Un sensor de par de torsión (400) para medir un par de torsión en un objeto (2) , comprendiendo el sensor:
un sistema de detección de posición (1) según la reivindicación 1; al menos dos manguitos (403, 404) , cada uno con una pluralidad de dichas agrupaciones de patrón (4, 4') , estando montados dichos manguitos en dicho objeto (2) ; y
en el que dicho sistema de detección de posición (1) obtiene datos de posición de cada manguito (403, 404) Y dicho dispositivo computacional (200) comprende además medios para detectar una diferencia angular entre la posición de dichos manguitos (403, 404) Y para determinar un par de torsión a partir de dicha diferencia angular.
20. Un procedimiento para determinar la posición de un objeto (2) , que comprende las etapas de:
detectar con un dispositivo de detección una agrupación de patrón (4) ubicada en dicho objeto (2) ; determinar posiciones de centros geométricos en al menos dos direcciones de puntos de nodo (301 a 304) en dicha agrupación de patrón (4) ; determinar el tipo de punto de nodo (301 a 304) ; determinar el tipo y la posición de puntos de información (305 a 311) ubicados en dicho objeto (2) ; y determinar la posición absoluta de dicho objeto (2) con respecto a dicho dispositivo de detección (3) usando información combinada de dicha posición y dicho tipo de punto tanto de los puntos de nodo (301 a 304) como de los puntos de información (305 a 311) .
21. Un programa informático almacenado en un medio legible por ordenador que codifica las etapas de procedimiento de la reivindicación 18 para llevarse a cabo en un dispositivo computacional (200) usando datos recibidos desde un dispositivo de detección (3) .
22. El programa informático según la reivindicación 21, en el que las posiciones de centros geométricos de puntos de nodo (301 a 304) se determinan usando un algoritmo visual que usa un análisis de gradiente.
23. Un detector angular para determinar la posición angular de un objeto (2) , que comprende:
un sistema de detección de posición (1) según la reivindicación 1,
en el que dicho dispositivo computacional (200) comprende además medios para determinar la posición angular de dicho objeto (2) a partir de dicho análisis de señales.
•
A lk
-
-°
Patentes similares o relacionadas:
Detección de reposo usando un acelerómetro, del 6 de Mayo de 2020, de QUALCOMM INCORPORATED: Un procedimiento para reconocer el movimiento de un dispositivo móvil que comprende: medir un nivel de vibración de aceleración de dicho dispositivo móvil […]
Controlador de juego, del 11 de Marzo de 2020, de NINTENDO CO., LTD.: Un controlador de juego que se puede conectar de forma extraíble a una unidad principal que tiene un elemento deslizante de lado […]
SISTEMA OPTICO ELECTRONICO MU LTI FUNCIONAL PARA INTERACCION TACTIL CON PANTALLAS Y PROYECTORES; Y METODO IMPLEMENTADO POR COMPUTADOR PARA APLICAR EN CONJUNTO CON DICHO SISTEMA OPTICO EL PROCESAMIENTO DE INFORMACION PARA PROCESOS DE ENSEÑANZA Y APRENDIZAJE, del 27 de Febrero de 2020, de ACCESO VIRTUAL - AULAS AMIGAS S.A.S: La presente solicitud satisface la necesidad de proporcionar un sistema para ayuda a la enseñanza que logre conectar a un proyector, televisor o pantalla para interacción […]
Método para proporcionar notificaciones de nuevos acontecimientos en un dispositivo de pantalla pequeña, del 25 de Diciembre de 2019, de BlackBerry Limited: Método de proporcionar notificaciones de mensajes no leídos en un dispositivo de comunicación inalámbrico, que comprende: visualizar al menos un primer icono […]
 Método para proporcionar notificaciones de nuevos eventos en un dispositivo de pantalla pequeña, del 25 de Diciembre de 2019, de BlackBerry Limited: Un método para proporcionar notificaciones de nuevos eventos de mensajes no leídos en un dispositivo de comunicación inalámbrico , estando configurado el dispositivo […]
Método para proporcionar notificaciones de nuevos eventos en un dispositivo de pantalla pequeña, del 25 de Diciembre de 2019, de BlackBerry Limited: Un método para proporcionar notificaciones de nuevos eventos de mensajes no leídos en un dispositivo de comunicación inalámbrico , estando configurado el dispositivo […]
Seguimiento tridimensional de un dispositivo de control del usuario en un volumen, del 30 de Octubre de 2019, de zSpace, Inc: Un método que comprende: recibir múltiples imágenes capturadas de al menos un punto visualmente indicado de un dispositivo de control del usuario […]
Procedimiento de control de un cursor de punto de mira por medio de un mando de juego y mando de juegocorrespondiente, del 18 de Septiembre de 2019, de BIGBEN INTERACTIVE SA: Procedimiento de control de un cursor de punto de mira en una pantalla por medio de un dispositivo de accionamiento de juego equipado con […]
Calibración por hardware de seguidor ocular, del 7 de Agosto de 2019, de TOBII AB: Unidad de procesamiento de datos configurada para calibrar por hardware un dispositivo de seguimiento de mirada con respecto a una unidad […]