APARATO Y MÉTODO DE DESPLIEGUE.
- Un aparato de despliegue (1) adaptado para extraer artículos (14) situados sobre una superficie de soporte (5),
estando dichos artículos situados en una serie de orientaciones y/o posiciones sobre dicha superficie de soporte, incluyendo dicho aparato de despliegue, - un detector (2) de artículos que puede determinar la orientación y la posición de, por lo menos, un artículo (14) no solapado, situado en dicha superficie (5) de soporte, y - un sistema de extracción (4) que puede captar y extraer un artículo (14) desde dicha superficie de soporte (5), y - un sistema de maniobra (3) que puede situar el sistema de extracción para captar un artículo seleccionado (14) y mover el artículo captado a una posición y/u orientación predeterminadas, en el que dicho detector (2) de artículos puede recibir o generar una imagen de los artículos (14) situados sobre la superficie de soporte (5) e incluye, o está interconectado operativamente con, un medio de procesamiento (20) que puede seleccionar un artículo no solapado (14) para su extracción desde la superficie de soporte (5) según, por lo menos, un criterio de selección, pudiendo dicho medio de procesamiento (20) analizar la imagen de los artículos para determinar la posición y la orientación de artículos no solapados (14), y caracterizado porque dicho medio de procesamiento (20) puede determinar la prioridad de los artículos (14) a seleccionar para su captación con el sistema de extracción (4), después de la comparación de la imagen obtenida, con una base de datos de imágenes de referencia que tiene imágenes de referencia de artículos que incluyen por lo menos una característica de identificación predeterminada en orientaciones del artículo conocidas, y determinar la posición y la orientación de uno o más artículos (14)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NZ2005/000129.
Solicitante: GEA AVAPAC LIMITED.
Nacionalidad solicitante: Nueva Zelanda.
Dirección: 12-18 FOREMAN ROAD HAMILTON NUEVA ZELANDA.
Inventor/es: WILLIAMSON,RHODERICK,JOHN.
Fecha de Publicación: .
Fecha Solicitud PCT: 13 de Junio de 2005.
Fecha Concesión Europea: 25 de Agosto de 2010.
Clasificación Internacional de Patentes:
- B25J15/00M
- B25J15/06V
- B25J19/02B4
- B25J9/02B2
- B65B43/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 43/00 Formación, alimentación, abertura o montaje de receptáculos o recipientes, en unión con el embalaje (formación de bolsas en las hojas, los elementos de envoltura o en las bandas, presionando el material en las matrices o desplazándolo sobre matrices de plegado B65B 47/00). › Alimentación de sacos o cintas de cartón separadamente a partir de pilas o de cargadores.
- B65G61/00 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › Utilización de aparatos de toma o de transferencia, o de manipuladores, para apilar o desapilar objetos no previstos en otro lugar.
Clasificación PCT:
- B23Q7/04 B […] › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 7/00 Dispositivos para la manipulación de piezas, especialmente combinados a las máquinas-herramientas o dispuestos en estas máquinas o especialmente concebidos para ser utilizados en relación con estas máquinas, p. ej. para el transporte, la carga, la colocación, la descarga, la selección (incorporados a los husillos de trabajo B23B 13/00, B23B 19/02; para tornos automáticos o semiautomáticos B23B 15/00). › por medio de pinzas.
Clasificación antigua:
- B23Q7/04 B23Q 7/00 […] › por medio de pinzas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
CAMPO TÉCNICO
Esta invención se refiere a un método y un aparato de despliegue. Preferentemente, la presente invención puede adaptarse para seleccionar artículos y suministrarlos a una cadena de producción. A lo largo de toda esta descripción, se hará referencia asimismo a la presente invención siendo ésta utilizada para seleccionar, retirar y desplegar una bolsa u otro artículo de embalaje, desde una pila de bolsas o artículos de embalaje situada en una palé, pero los expertos en la materia apreciarán que se contemplan asimismo otras aplicaciones o configuraciones de la presente invención. TÉCNICA ANTERIOR
Una serie de procesos de fabricación industrial a gran escala, consumen volúmenes significativos de materiales de embalaje vacíos. Los materiales de embalaje se llenan generalmente con una mercancía o un producto procesados. Dichas cadenas de producción pueden ser alimentadas con materiales de embalaje en bruto vacíos, como son cartones troquelados o bolsas prefabricadas vacías. Para una serie de cadenas de producción de fabricación, como por ejemplo, las asociadas con la producción de leche en polvo empaquetada, generalmente se retira manualmente una bolsa vacía de una pila de bolsas vacías almacenada en un palé. En el caso de las cadenas de envasado de leche en polvo, por ejemplo, unas 25 000 o 50 000 bolsas de capacidad comparativamente grande están empaquetadas en pilas sobre un palé.
Debido a la geometría de las bolsas utilizadas, es necesario utilizar una serie de orientaciones variables de las bolsas, para apilar eficientemente el mayor número posible de bolsas en un palé. Esta variación en la orientación de la pila de bolsas requiere normalmente que un operario humano identifique y seleccione una bolsa concreta para la despaletización, asegurándose asimismo que la altura global de las pilas en el palé se mantiene consistente y que la carga del palé permanece estable.
Sin embargo, la utilización de mano de obra para la despaletización de las bolsas implica algunos inconvenientes y desventajas.
La mano de obra representa un coste directo en el proceso de fabricación involucrado, y requiere asimismo incrementar y mantener procedimientos de entrenamiento del operario y de seguridad del operario. Un error o una negligencia del operario pueden provocar asimismo pérdidas de fabricación, y potencialmente daños en la fábrica o en el equipo.
Existen muchos sistemas utilizados en la fabricación, que determinan las orientaciones de objetos o artículos, para asegurar que las maniobras, el maquinado o cualquier otra acción llevada a cabo sobre el objeto, es precisa y eficiente. La patente de EE.UU. número 6 665 588 describe un sistema de extracción de una pieza de trabajo, utilizado para extraer con precisión piezas de coches u otros artículos en una cadena de montaje. Se utiliza un láser u otro dispositivo de telemetría para explorar cada objeto en la cadena, y determinar su orientación. A continuación se analiza esta información para dirigir un brazo robótico con el objeto de extraer la pieza de trabajo. Si bien este sistema es útil para asegurar la extracción precisa de piezas de trabajo en una cadena, no puede determinar las orientaciones y las posiciones de múltiples objetos simultáneamente. Asimismo, este sistema no puede compensar una serie de objetos distribuidos de forma desigual, o en muchas orientaciones y/o configuraciones.
La patente francesa 2 512 357 (de Thibault) da a conocer un aparato para elegir un paquete entre una pila de paquetes. Cada paquete incluye un blanco en su superficie. Se utiliza una cámara de video situada sobre la pila, para obtener una imagen de los blancos en los paquetes que están a la vista en la pila. La señal de video se procesa para determinar el ángulo subtendido en la cámara por cada blanco. El ángulo se utiliza como indicador de la altura del paquete, identificándose el blanco/paquete que subtiende el ángulo mayor como el más alto en la pila (es decir, el más próximo a la cámara). Este paquete es seleccionado para su extracción desde la pila (o para otro tratamiento).
Pueden surgir errores durante la utilización del sistema de Thibault, cuando la altura del paquete es relativamente pequeña, como por ejemplo con bolsas vacías o cartones doblados, en cuyo caso puede ser difícil detectar con precisión la diferencia de tamaño entre paquetes apilados.
Además, no puede determinar simultáneamente las orientaciones y las posiciones de múltiples objetos, o compensar una serie de objetos distribuidos
desigualmente, o en muchas orientaciones y/o configuraciones.
Sería preferible tener un sistema alternativo para el despliegue de materiales de embalaje vacíos o de cualesquiera otros artículos, dentro de un proceso de fabricación. En concreto, sería preferible tener un sistema, un método y un aparato automatizados para extraer una bolsa, un paquete u otro objeto almacenado en un palé o en otra estructura de soporte.
Es sabido que el término 'comprender' puede, en varias jurisdicciones, recibir un significado bien exclusivo o inclusivo. Para el propósito de esta descripción, y salvo que se indique otra cosa, el término 'comprender' debe tener un significado inclusivo (es decir, se considerará que significa una inclusión, no solamente de los componentes listados a los que se refiere directamente, sino asimismo de otros componentes o elementos no especificados). Se utilizará asimismo esta lógica cuando se utilice el término 'compuesto de' o 'que comprende', en relación con una o más etapas en un método o proceso.
Es un objetivo de la presente invención tratar los problemas anteriores, o por lo menos dar a conocer al público una opción útil.
Resultarán evidentes otros aspectos y ventajas de la presente invención, a partir de la descripción siguiente, que se proporciona solamente a modo de ejemplo. EXPOSICIÓN DE LA INVENCIÓN
De acuerdo con un aspecto de la presente invención, se da a conocer un aparato de despliegue según la reivindicación 1.
Preferentemente, dichos artículos son artículos de embalaje. Sin embargo, se apreciará que la presente invención puede utilizar artículos de cualquier forma conveniente, incluyendo artículos de embalaje llenos y sin llenar, objetos sólidos, objetos semi-rígidos y/o cualquier otro artículo que pueda mantener un contorno o una forma o una imagen, definibles o reconocibles. En esta descripción, la referencia a artículos que son artículos de embalaje es solamente por razones ejemplares, y la invención no se limita a los mismos.
Por lo tanto, cada artículo seleccionado puede desplegarse en la misma posición y/u orientación predeterminadas (por ejemplo, sobre un transportador) o en una secuencia de posición, por ejemplo para apilar artículos en una configuración regular en un contenedor mayor. La presente invención puede utilizarse incluso para reapilar/reordenar artículos desorganizados, en un orden/orientación concretos en la misma superficie de trabajo.
De acuerdo con una realización, el sistema detector, de extracción de artículos y/o el sistema de maniobras pueden estar formados como un dispositivo combinado,
o como diferentes capacidades de un aparato/mecanismo común.
Tal como se utiliza en el presente documento, un medio de procesamiento incluye cualquier medio de computación conveniente incluyendo ordenadores personales (PC, personal computers) autónomos, ordenadores móviles, etc., controladores incorporados, dispositivos de procesamiento dedicados integrados en un sistema de control del aparato de despliegue específico, y/o sistemas informáticos monitorizados o manejados de forma remota.
Dependiendo de la configuración concreta de los artículos que se extraen y se reorientan, el sistema de extracción puede configurarse en correspondencia para adaptarse al contorno general del artículo. De este modo, si los artículos fueran sustancialmente rectangulares, formar el sistema de extracción en una configuración sustancialmente rectangular proporciona el medio para acoplarse con una mayor proporción del artículo. Por lo tanto, de acuerdo con otro aspecto de la presente invención, el sistema de maniobra puede alinear el sistema de extracción con una orientación de un artículo seleccionado.
Sin embargo, se apreciará que el sistema de extracción no tiene necesariamente que estar alineado con el artículo seleccionado, dado que el acoplamiento con el artículo seleccionado no solapa...
Reivindicaciones:
1. Un aparato de despliegue (1) adaptado para extraer artículos (14) situados sobre una superficie de soporte (5), estando dichos artículos situados en una serie de orientaciones y/o posiciones sobre dicha superficie de soporte, incluyendo dicho aparato de despliegue,
- un detector (2) de artículos que puede determinar la orientación y la posición de, por lo menos, un artículo (14) no solapado, situado en dicha superficie (5) de soporte, y -un sistema de extracción (4) que puede captar y extraer un artículo (14) desde dicha superficie de soporte (5), y -un sistema de maniobra (3) que puede situar el sistema de extracción para captar un artículo seleccionado (14) y mover el artículo captado a una posición y/u orientación predeterminadas, en el que dicho detector (2) de artículos puede recibir o generar una imagen de los artículos (14) situados sobre la superficie de soporte (5) e incluye, o está interconectado operativamente con, un medio de procesamiento (20) que puede seleccionar un artículo no solapado (14) para su extracción desde la superficie de soporte (5) según, por lo menos, un criterio de selección, pudiendo dicho medio de procesamiento (20) analizar la imagen de los artículos para determinar la posición y la orientación de artículos no solapados (14), y
caracterizado porque
dicho medio de procesamiento (20) puede determinar la prioridad de los artículos (14) a seleccionar para su captación con el sistema de extracción (4), después de la comparación de la imagen obtenida, con una base de datos de imágenes de referencia que tiene imágenes de referencia de artículos que incluyen por lo menos una característica de identificación predeterminada en orientaciones del artículo conocidas, y determinar la posición y la orientación de uno o más artículos (14). 2. Un aparato de despliegue (1) como el reivindicado en la reivindicación 1,
en el que el sistema de maniobra (3) puede alinear el sistema de extracción (4) con una orientación de un artículo seleccionado (14).
3. Un aparato de despliegue (1) como el reivindicado en cualquiera de las reivindicaciones anteriores, en el que una imagen obtenida por el detector (2) de artículos puede ser analizada por dichos medios de procesamiento (20) programados de acuerdo con un soporte lógico informático, para identificar una o más características de identificación predeterminadas (21, 22) presentes en cada artículo (14).
4. Un aparato de despliegue (1) como el reivindicado en cualquiera de las reivindicaciones precedentes, en el que la prioridad para designar artículos sucesivos
(14) a seleccionar, está limitada a artículos que: o no están solapados por otro artículo (14); o o son los más altos o los más externos en la superficie de soporte (5); o o son los más próximos a un punto o eje de referencia designado; o o son los más próximos a puntos o ejes de referencia designados, alternativos; o
o están situados encima de la posición de máximo peso aplicado por los artículos
(14) a la superficie de soporte (5).
5. Un aparato de despliegue (1) como el reivindicado en cualquiera de las reivindicaciones precedentes, que incluye además uno o más detectores de posición (23), en el que el medio de procesamiento (20) determina el artículo (14) más alto desde la superficie de soporte, conjuntamente con la retroalimentación de la información de la altura de la posición, procedente de dichos detectores de posición (23).
6. Un aparato de despliegue (1) como el reivindicado en cualquiera de las reivindicaciones previas, en el que el sistema de maniobra (3) incorpora además un mecanismo de accionamiento (24) o sistema de ajuste de la altura, que puede ajustar la altura del sistema de extracción (4) en relación con los artículos (14) situados sobre la superficie de soporte (5), y en el que dicho mecanismo de accionamiento
(24) o sistema de ajuste de la altura incluye sistemas de ajuste (13) de la altura de la superficie de soporte, que pueden subir o bajar una superficie de soporte (5) cargada con artículos (14), para ajustar la altura de los artículos a desplegar, con respecto al sistema de extracción (14).
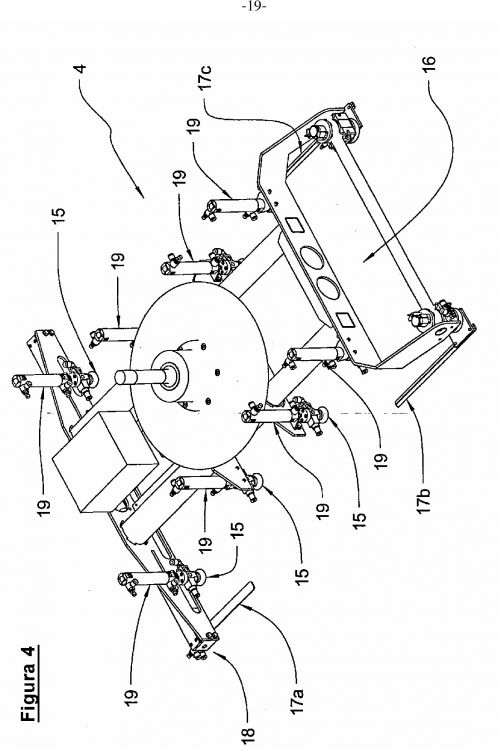
7. Un aparato de despliegue (1) como el reivindicado en cualquiera de las reivindicaciones previas, en el que dicho sistema de extracción (4) incluye, por lo menos, un elemento de separación (17) adaptado para sobresalir, por lo menos parcialmente, entre un artículo seleccionado (14) captado por el sistema de extracción (4) y un artículo adyacente situado bajo el artículo seleccionado (14).
8. Un aparato de despliegue (1) como el reivindicado en la reivindicación 7, 5 en el que una parte del elemento de separación (17) que sobresale entre un artículo
(14) a desplegar y un artículo adyacente en una pila de artículos (14), está adaptada para moverse a través del lado inferior del artículo (14) seleccionado para su despliegue, con el objeto de romper las conexiones o acoplamientos entre los dos artículos adyacentes (14).
10 9. Un método de despliegue de artículos (14) utilizando el aparato de despliegue (1) como el reivindicado en cualquiera de las reivindicaciones anteriores, estando situados dichos artículos (14) sobre una superficie de soporte (5) en una serie de orientaciones, estando dicho método de despliegue caracterizado por las etapas de: -determinar la orientación y la posición de, por lo menos, un artículo no solapado (14) seleccionado, utilizando el detector (2) de artículos, y -maniobrar el sistema de extracción (4) para engranarlo con el artículo seleccionado (14), -mover el artículo seleccionado (14) a una posición y orientación predeterminadas. Siguen seis hojas de dibujos.
Patentes similares o relacionadas:
Procedimiento para el llenado de envases con productos que van cambiando en una máquina llenadora, del 4 de Diciembre de 2019, de SIG TECHNOLOGY AG: Procedimiento para el llenado de envases con productos que van cambiando en una máquina llenadora , en el que los envases se forman a partir de […]
Sistema y método de vaciar un conjunto de almacenamiento tubular, del 20 de Noviembre de 2019, de FUJI SEAL INTERNATIONAL, INC: Un sistema de vaciado para vaciar una pluralidad de recipientes flexibles desde un conjunto de almacenamiento tubular, en donde cada uno de los recipientes […]
Dispositivo de control óptico de una cara de un recorte, máquina de tratamiento de recortes y plegadora-encoladora que comprende el dispositivo, del 20 de Marzo de 2019, de BOBST MEX SA: Dispositivo de control óptico de una cara de un recorte , que comprende: - un transportador de vacío , adecuado para transportar […]
Dispositivo y procedimiento para el envasado de sacos abiertos, del 6 de Marzo de 2019, de HAVER & BOECKER OHG: Dispositivo para el envasado de productos a granel en sacos abiertos vacíos que comprende al menos un puesto de llenado y una […]
Montaje y método para el almacenamiento de recipientes, del 14 de Febrero de 2019, de FUJI SEAL INTERNATIONAL, INC: Montaje para el almacenamiento de una pluralidad de recipientes flexibles (1, 121a a f, 122a a f, 123a a f, 124a a f), el montaje comprende una pluralidad […]
Método de fabricación y de llenado de un envase y envase correspondiente, del 8 de Enero de 2019, de N.V. NUTRICIA: Método de fabricación y de llenado de un envase con un producto nutricional en polvo, método que comprende: a) proporcionar una cubeta formada térmicamente […]
Dispositivo y procedimiento para suministrar bolsitas a un carrusel, del 22 de Noviembre de 2018, de Fillshape S.r.l: Procedimiento para suministrar bolsitas a un carrusel concebidas para contener productos líquidos, viscosos o granulados, comprendiendo dicho procedimiento las etapas de: […]
Sistema de cámaras que comprende varias cámaras de alojamiento dispuestas una al lado de otra en paralelo para alojar bolsas de plástico, del 19 de Septiembre de 2018, de INDAG GESELLSCHAFT FUR INDUSTRIEBEDARF MBH & CO. BETRIEBS KG: Sistema de cámaras que comprende varias cámaras de alojamiento dispuestas una al lado de otra en paralelo para el alojamiento y la […]