VEHICULO AUTONOMO NO TRIPULADO PARA DESPLAZAR COMIDA.
Vehículo autónomo no tripulado (1) para desplazar comida situada en el suelo esencialmente a un lado,
vehículo que está provisto de:
- dos ruedas (4'', 5'') que son traccionadas independientemente por medios actuadores distintos (4, 5),
- un dispositivo de regulación de diferencias de par (10) para regular la diferencia de par entre las ruedas (4'', 5''),
- una unidad de control (11) para controlar el vehículo y moverlo en una dirección de avance, y
- unos medios desplazadores de comida (12) para desplazar la comida esencialmente hacia un lado, caracterizado porque el vehículo (1) comprende un dispositivo medidor de distancias (6) para determinar la distancia desde el vehículo a una porción de pared, siendo programada la unidad de control (11) de tal manera que, durante el funcionamiento, el vehículo se mantendrá a una distancia de la porción de pared determinada por el dispositivo medidor de distancias (6), distancia que será mayor o igual que una distancia mínima predefinida a la porción de pared, cuya distancia mínima será modificable durante dicho funcionamiento
Tipo: Resumen de patente/invención. Número de Solicitud: W07000083NL.
Solicitante: MAASLAND N.V..
Nacionalidad solicitante: Países Bajos.
Dirección: WEVERSKADE 110,3147 PA MAASSLUIS.
Inventor/es: VAN DEN BERG, KAREL.
Fecha de Publicación: .
Fecha Concesión Europea: 9 de Septiembre de 2009.
Clasificación Internacional de Patentes:
- A01K1/10A
- A01K5/02F
Clasificación PCT:
- A01K1/10 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01K CRÍA DE ANIMALES; AVICULTURA; APICULTURA; PISCICULTURA; PESCA; ANIMALES PARA CRIA O REPRODUCCIÓN, NO PREVISTOS EN OTRO LUGAR; NUEVAS VARIEDADES DE ANIMALES. › A01K 1/00 Alojamientos de animales; Su equipo. › Pesebres de enrejado.
- A01K5/02 A01K […] › A01K 5/00 Dispositivos para la alimentación del ganado o la caza (A01K 1/10 tiene prioridad; dispositivos para la alimentación de las aves de corral u otras aves A01K 39/00). › Sistemas automáticos.
Fragmento de la descripción:
Vehículo autónomo no tripulado para desplazar comida.
La invención trata de un vehículo autónomo no tripulado según el preámbulo de la reivindicación 1.
Los vehículos no tripulados son ampliamente conocidos. Por ejemplo, en la patente EP-A-0943235 se describe un vehículo no tripulado para limpiar el suelo de un establo.
Además, el modelo de utilidad austriaco AT-6016-U describe un dispositivo que se mueve a lo largo de unos medios de guía para desplazar la comida en un sentido esencialmente transversal a la dirección de avance.
La patente FR 2862489 describe un vehículo autónomo no tripulado para desplazar la comida situada en el suelo esencialmente hacia un lado. El vehículo no tripulado usa un cable guía para guiar al vehículo a lo largo de una trayectoria deseada.
El objeto de la invención es conseguir un vehículo no tripulado que sea capaz, sin medios de guía y de forma autónoma, de desplazar la comida en un sentido esencialmente transversal a la dirección de avance.
De acuerdo con la presente invención, este objetivo se consigue mediante un vehículo autónomo no tripulado para desplazar la comida situada en el suelo esencialmente hacia un lado, vehículo que está provisto de dos ruedas que son traccionadas independientemente por medios actuadores distintos, de un dispositivo medidor de distancias para determinar la distancia desde el vehículo a una porción de pared, de un dispositivo de regulación de diferencias de par para regular la diferencia de par entre las ruedas, de una unidad de control para controlar el vehículo y moverlo en una dirección de avance, y de unos medios desplazadores de comida para desplazar la comida esencialmente hacia un lado, siendo programada la unidad de control de tal manera que, durante el funcionamiento, el vehículo se mantendrá a una distancia de la porción de pared determinada por el dispositivo medidor de distancias, distancia que será mayor o igual que una mínima distancia predefinida a la porción de pared, mínima distancia que será modificable durante dicho funcionamiento. De un modo preciso, esta disposición y la unidad de control programada de esta manera aseguran que el vehículo autónomo no tripulado, mientras desplaza la comida al menos esencialmente hacia un lado, es posicionado y propulsado correctamente, a pesar de la (impredecible) fuerza de reacción que es ejercida por la comida sobre el vehículo no tripulado.
La regulación de la distancia mínima predefinida puede depender, por ejemplo, del momento del día, del período de tiempo transcurrido desde que el vehículo no tripulado estuvo en la misma posición, del tipo de animales o de los animales individuales presentes en la porción de pared, por ejemplo, un portón de alimentación.
En un modo de realización del vehículo no tripulado, de acuerdo con la invención, el dispositivo de regulación de diferencias de par está provisto de un dispositivo medidor de diferencias de par para determinar la diferencia de par entre las ruedas. En este caso, en particular se prefiere que la unidad de control esté programada de tal modo que, durante el funcionamiento, las ruedas traccionadas del vehículo tengan una diferencia de par determinada por el dispositivo medidor de diferencias de par, diferencia que será menor o igual que un par máximo predefinido. El controlar el vehículo no tripulado a partir de la diferencia de par asegura que éste siempre desplazará una al menos casi igual cantidad de comida esencialmente hacia un lado, ya que la diferencia de par es precisamente causada por y es proporcional a la fuerza necesaria para desplazar una cantidad de comida.
En particular, se puede conseguir un desplazamiento exacto de la comida hacia un lado si el vehículo no tripulado está provisto de un dispositivo medidor de la orientación, para determinar la orientación de la línea central del vehículo respecto a la porción de pared, siendo programada la unidad de control de tal manera que, durante el funcionamiento, la línea central del vehículo mantenga una orientación determinada por el dispositivo medidor de la orientación respecto a la porción de pared, orientación que será al menos casi igual a una orientación predefinida.
En un modo de realización del vehículo no tripulado, de acuerdo con la presente invención, la unidad de control está programada de tal manera que, para controlar el vehículo, se da prioridad a la distancia determinada por el dispositivo medidor de distancias en combinación con la distancia mínima predefinida. Esto evita que el vehículo no tripulado se acerque demasiado a la porción de pared en caso de que haya poca comida en el suelo. En particular, en caso de que la porción de pared sea un portón de alimentación donde estén presentes animales, como por ejemplo vacas, una aproximación excesiva a los mismos puede resultar en una gran molestia a éstos poco deseable. Además, una distancia a la porción de pared demasiado pequeña puede generar una acumulación no deseada de la comida.
En un modo de realización del vehículo no tripulado, de acuerdo con la presente invención, la diferencia predefinida máxima de par y/o la orientación predefinida es/son también regulables durante el funcionamiento.
Si los medios desplazadores de comida comprenden un elemento circular que gira libremente, cuya circunferencia exterior constituye la circunferencia exterior del vehículo, no es necesario traccionar separadamente dichos medios desplazadores de comida, ya que el elemento circular que gira libremente es movido por la propia comida (esencialmente por fricción).
Si se desea, la superficie exterior del elemento circular puede estar provista de uno o más elementos y/o capas aumentadores de la fricción. Para obtener un desplazamiento fiable de la comida esencialmente hacia un lado, un modo de realización del vehículo no tripulado, de acuerdo con la invención, se caracteriza porque el elemento circular está inclinado de manera que éste presente su parte más próxima al suelo al menos casi en el sentido de avance del vehículo. Si el ángulo definido por el elemento circular y el suelo es regulable, el vehículo no tripulado puede ser ajustado de manera que desplace diferentes cantidades de comida de un modo adecuado al menos casi en sentido esencialmente transversal a la dirección de avance del vehículo.
El dispositivo medidor de distancias preferiblemente comprende un sensor ultrasónico. Además, es ventajoso que el vehículo no tripulado esté provisto de un dispositivo para detectar el deslizamiento de al menos una de las ruedas traccionadas.
Si el vehículo no tripulado dispone de un fondo abierto, se evita que el material, como puede ser la comida, se acumule en el interior del vehículo y que afecte de un modo posiblemente desfavorable a la operación del vehículo no tripulado.
Según un modo de realización del vehículo no tripulado de acuerdo con la invención, se puede suministrar la comida si el vehículo no tripulado dispone de un almacén contenedor para apilar la comida, y de un dispositivo de descarga para descargar la comida al suelo. Preferiblemente, dicho almacén contenedor dispone de un dispositivo mezclador para mezclar la comida. En este caso, es ventajoso el que la unidad de control controle el funcionamiento del dispositivo de descarga a partir de los datos del dispositivo medidor de distancias y/o del dispositivo medidor de diferencias de par y/o de la velocidad del vehículo y/o de la disminución de peso en el almacén contenedor. Alternativa o adicionalmente, el vehículo no tripulado puede disponer de un dispositivo de señalización para mandar un señal (por ejemplo, para llamar la atención del propietario y/o del operario del vehículo no tripulado), controlando la unidad de control el funcionamiento del dispositivo de señalización a partir de los datos del dispositivo medidor de distancias y/o del dispositivo medidor de diferencias de par.
La invención se explica a continuación en mayor detalle con referencia a los dibujos, en los que:
La figura 1 es una vista esquemática de perfil del vehículo no tripulado según la invención, y
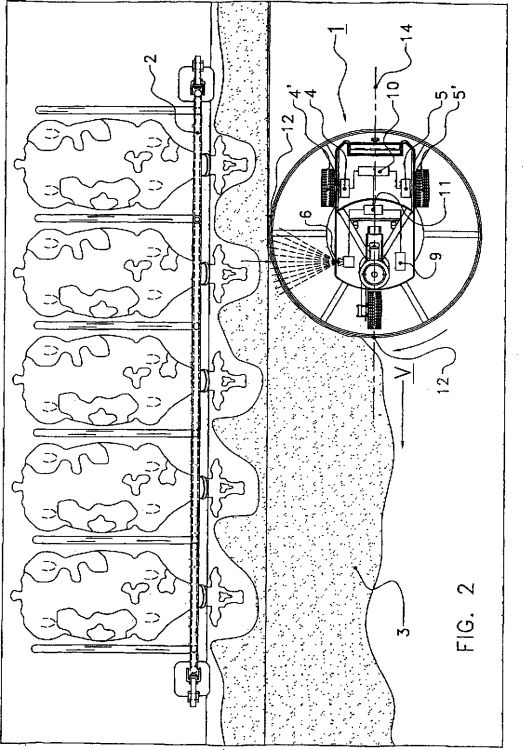
La figura 2 es una vista esquemática en planta del vehículo no tripulado según la invención, para ser utilizado para desplazar la comida a un portón de alimentación.
Las figuras 1 y 2 muestran un vehículo autónomo no tripulado 1 para desplazar comida 3 situada en el suelo esencialmente a un lado hacia un portón de alimentación 2. La comida 3, que puede ser sólida, líquida o una mezcla de ambas, ha sido depositada en...
Reivindicaciones:
1. Vehículo autónomo no tripulado (1) para desplazar comida situada en el suelo esencialmente a un lado, vehículo que está provisto de:
- dos ruedas (4', 5') que son traccionadas independientemente por medios actuadores distintos (4, 5),
- un dispositivo de regulación de diferencias de par (10) para regular la diferencia de par entre las ruedas (4', 5'),
- una unidad de control (11) para controlar el vehículo y moverlo en una dirección de avance, y
- unos medios desplazadores de comida (12) para desplazar la comida esencialmente hacia un lado,
caracterizado porque el vehículo (1) comprende un dispositivo medidor de distancias (6) para determinar la distancia desde el vehículo a una porción de pared, siendo programada la unidad de control (11) de tal manera que, durante el funcionamiento, el vehículo se mantendrá a una distancia de la porción de pared determinada por el dispositivo medidor de distancias (6), distancia que será mayor o igual que una distancia mínima predefinida a la porción de pared, cuya distancia mínima será modificable durante dicho funcionamiento.
2. Vehículo no tripulado según la reivindicación 1, caracterizado porque el dispositivo de regulación de diferencias de par (10) está provisto de un dispositivo medidor de diferencias de par para determinar la diferencia de par entre las ruedas (4', 5').
3. Vehículo no tripulado según la reivindicación 2, caracterizado porque la unidad de control (11) está programada de tal modo que, durante el funcionamiento, las ruedas traccionadas (4', 5') del vehículo tengan una diferencia de par determinada por el dispositivo medidor de diferencias de par (10), diferencia que será menor o igual que un par máximo predefinido, en donde preferiblemente la diferencia de par máximo predefinido es regulable durante el funcio- namiento.
4. Vehículo no tripulado según las reivindicaciones 1, 2 ó 3, caracterizado porque el vehículo no tripulado está provisto de un dispositivo medidor de la orientación (9) para determinar la orientación de la línea central (14) del vehículo respecto a la porción de pared, siendo programada la unidad de control (11) de tal manera que, durante el funcionamiento, la línea central (14) del vehículo mantenga una orientación determinada por el dispositivo medidor de la orientación (9) respecto a la porción de pared, cuya orientación será al menos casi igual a una orientación predefinida.
5. Vehículo autónomo no tripulado según las reivindicaciones 2, 3 ó 4, caracterizado porque la unidad de control (11) está programada de tal manera que, para controlar el vehículo, se da prioridad a la distancia determinada por el dispositivo medidor de distancias (6) en combinación con la distancia mínima predefinida.
6. Vehículo autónomo no tripulado según las reivindicaciones 4 ó 5, si ésta depende de la reivindicación 4, caracterizado porque la orientación predefinida es regulable durante el funcionamiento.
7. Vehículo autónomo no tripulado según cualquiera de las reivindicaciones anteriores, caracterizado porque los medios desplazadores de comida (12) comprenden un elemento circular que gira libremente, cuya circunferencia exterior constituye la circunferencia exterior del vehículo.
8. Vehículo autónomo no tripulado según la reivindicación 7, caracterizado porque el elemento circular está inclinado de manera que éste presenta su parte más próxima al suelo al menos casi en el sentido de avance del vehículo.
9. Vehículo autónomo no tripulado según las reivindicaciones 7 u 8, caracterizado porque el ángulo definido por el elemento circular y el suelo es regulable.
10. Vehículo autónomo no tripulado según cualquiera de las reivindicaciones anteriores, caracterizado porque el dispositivo medidor de distancias (6) comprende un sensor ultrasónico.
11. Vehículo autónomo no tripulado según cualquiera de las reivindicaciones anteriores, caracterizado porque el vehículo no tripulado está provisto de un dispositivo para detectar el deslizamiento de al menos una de las ruedas traccionadas (4', 5').
12. Vehículo autónomo no tripulado según cualquiera de las reivindicaciones anteriores, caracterizado porque el vehículo no tripulado está provisto de un fondo abierto.
13. Vehículo autónomo no tripulado según cualquiera de las reivindicaciones anteriores, caracterizado porque el vehículo no tripulado dispone de un almacén contenedor para apilar la comida, y de un dispositivo de descarga para descargar la comida al suelo, y/o de un dispositivo mezclador para mezclar la comida.
14. Vehículo autónomo no tripulado según la reivindicación 13, caracterizado porque la unidad de control controla el funcionamiento del dispositivo de descarga a partir de los datos del dispositivo medidor de distancias (6) y/o del dispositivo medidor de diferencias de par (10) y/o de la velocidad del vehículo y/o de la disminución de peso en el almacén contenedor.
15. Vehículo autónomo no tripulado según cualquiera de las reivindicaciones anteriores, caracterizado porque el vehículo no tripulado está provisto de un dispositivo de señalización para mandar un señal, controlando la unidad de control (11) el funcionamiento del dispositivo de señalización a partir de los datos del dispositivo medidor de distancias (6) y/o del dispositivo medidor de diferencias de par (10).
Patentes similares o relacionadas:
Comedero para animales, del 21 de Abril de 2020, de ROTECNA, S.A.: 1. Comedero para animales, especialmente apto para ganado porcino, que comprende una tolva con una embocadura inferior (2a) para la salida […]
DISPOSITIVO DE ALIMENTACIÓN DE ANIMALES, del 24 de Enero de 2020, de RODERO VILLALTA, Antonio Pedro: Dispositivo de alimentación de animales de los que comprende una cinta transportadora apta para soportar y transportar alimentos, la cinta está dispuesta […]
Alimentador de ganado rotatorio con aberturas de alimentación de flujo por gravedad, del 6 de Noviembre de 2019, de OSBORNE INDUSTRIES, INC.: Alimentador para dispensar alimento a ganado, que comprende: - una tolva que comprende una pared lateral y un fondo ; - un sistema de flujo de […]
COMEDERO PARA CIERVOS MACHO, del 26 de Septiembre de 2019, de GIMÉNEZ GARCÍA-COURTOY, Álvaro: Comedero para ciervos macho que comprende: - un depósito de comida para almacenar ésta hasta el momento de su dispensación; - un pesebre para […]
 Sistema y procedimiento para la monitorización y la alimentación remotas de mascotas, del 25 de Septiembre de 2019, de SOCIETE DES PRODUITS NESTLE S.A.: Un sistema que comprende:
a) un sensor portátil configurado para obtener automáticamente una medición en tiempo real relacionada con la […]
Sistema y procedimiento para la monitorización y la alimentación remotas de mascotas, del 25 de Septiembre de 2019, de SOCIETE DES PRODUITS NESTLE S.A.: Un sistema que comprende:
a) un sensor portátil configurado para obtener automáticamente una medición en tiempo real relacionada con la […]
Sistema y procedimiento para la identificación de animales individuales basándose en imágenes de la espalda, del 14 de Agosto de 2019, de Viking Genetics FmbA: Un procedimiento para determinar la identidad de un animal individual en una población de animales con identidad conocida, comprendiendo el procedimiento las […]
Sistema para la conexión de dos extremos de tubería con los mismos diámetros externos y el mismo grosor de material y uso de dicho sistema, del 14 de Agosto de 2019, de Landmeco Ølgod A/S: Un sistema para unir dos extremos (2, 2A) de tubería con los mismos diámetros externos y los mismos grosores de pared en una extensión mutuamente […]
SISTEMA Y MÉTODO PARA IDENTIFICAR, ALIMENTAR Y MANEJAR ANIMALES, EN ESPECIAL GANADO LECHERO, del 27 de Junio de 2019, de MARICHAL, José: En los sistemas de producción de leche de base pastoril es una tarea compleja balancear la dieta individual de los animales mediante la alimentación […]