VACIADO NEUMATICO DE DESECHOS.
Procedimiento para el vaciado controlado de desechos de n puntos de recogida (RC),
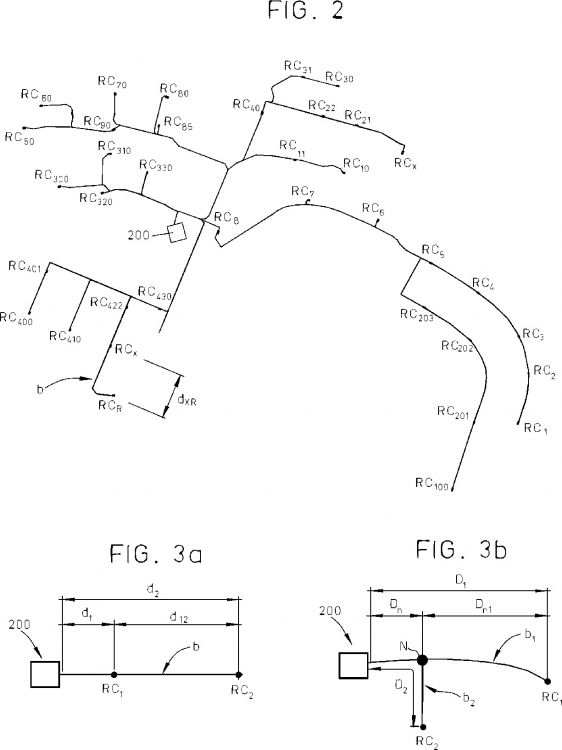
a través de unos conductos de desecho (100) que conducen a unas tuberías de transporte (110), comprendiendo las tuberías de transporte (110) varios ramales (b), quedando conectado al menos un punto de recogida (RC) a cada ramal (b) a través de un conducto de desecho (100) respectivo para conducir los desechos a al menos una estación de recogida (200), caracterizado por el hecho de que comprende las etapas de:
A- vaciar un primer punto de recogida (RC1);
B- establecer el punto de recogida que está siendo vaciado como punto de recogida de referencia (RCR);
C- seleccionar un nuevo punto de recogida a analizar (RCx);
D- determinar si se cumple al menos una primera condición, dependiendo dicha condición del citado punto de recogida de referencia (RCR) y dicho punto de recogida a analizar (RCx);
E- si dicha condición se cumple, vaciar el punto de recogida seleccionado (RCx), establecer el citado punto de recogida (RCx) como nuevo punto de recogida de referencia, y volver a la etapa C; y
F- si dicha condición no se cumple, seleccionar un nuevo punto de recogida a analizar (RCx) y volver a la etapa D
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07114088.
Solicitante: ROS ROCA, S.A..
Nacionalidad solicitante: España.
Inventor/es: CULLERE VIDAL,DAVID.
Fecha de Publicación: .
Fecha Solicitud PCT: 9 de Agosto de 2007.
Fecha Concesión Europea: 27 de Enero de 2010.
Clasificación Internacional de Patentes:
- B65F5/00B
Clasificación PCT:
- B65F5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65F RECOGIDA O RETIRADA DE BASURAS DOMESTICAS O DESPERDICIOS SIMILARES (desinfección de basuras A61L; desintegrado de basuras B02C; clasificación de basuras B03B, B07B; vehículos a mano para el transporte de recipientes de basuras B62B; soportes de sacos B65B 67/00; transformación de basuras en fertilizantes C05F; transformación de basuras en combustibles sólidos C10L; colectores, pozos E03F; disposiciones en los edificios para evacuar las basuras E04F 17/10; hornos de incineración de basuras F23G). › Recogida o retirada de basuras por medios distintos a los receptáculos a vehículos (silos de almacenado, su carga o descarga B65G).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Vaciado neumático de desechos.
Campo de la invención
La presente invención se refiere a la recogida neumática de desechos y, más concretamente, a un procedimiento para el vaciado controlado de desechos desde n puntos de recogida a través de unos conductos de desecho a por lo menos una estación de recogida, y a un sistema de recogida de este tipo de desechos.
Antecedentes de la invención
La eliminación de productos de desecho, tales como por ejemplo, residuos inorgánicos (papel, plásticos, metales, goma, cuero, textiles), y residuos orgánicos (restos de comida, madera y residuos domésticos que contienen materia orgánica) y similares a través de sistemas de vaciado es una técnica conocida en el estado de la técnica en la que los desechos son conducidos a través de un sistema de tuberías hacia una estación de recogida. Los sistemas neumáticos de vaciado se utilizan en general en centros urbanos, comunidades privadas, zonas de edificios, hospitales, hoteles, instalaciones industriales, aeropuertos, etc. y, en general, lugares donde los desechos se producen en grandes cantidades, siendo ésta una técnica rápida, limpia y eficaz para el vaciado centralizado de desechos.
En dicho sistema de vaciado, en una zona determinada se distribuye selectivamente una red de puntos de recogida fijos en los cuales se depositan los desechos. Cada uno de los puntos de recogida está conectado a unos conductos de desecho que conducen a un sistema de tuberías de transporte neumático común a través de correspondientes válvulas de descarga. Los desechos son conducidos por medio del sistema de tuberías de transporte neumático (típicamente en condiciones de vacío) que los aspira hacia al menos una estación de recogida para su tratamiento, reciclado o vaciado.
Los puntos de recogida se vacían cuando se detecta un volumen de desechos considerado suficiente para ser descargado en la estación de recogida. Esto se llevo a cabo mediante unos sensores de nivel asociados a los puntos de recogida los cuales envían una señal de indicación de nivel a unos medios de control para abrir la correspondiente válvula de descarga.
Dado que en la red de puntos de recogida existe una pluralidad de puntos de recogida, debe disponerse un sistema de control con el fin de mejorar el rendimiento, especialmente en grandes redes. De este modo, el vaciado ha de realizarse vaciando el primero que llega o formando grupos de puntos de recogida de acuerdo con un valor de prioridad que representa la importancia relativa del punto de recogida del grupo.
A tal efecto, se ha desarrollado en los últimos años el vaciado controlado por nivel en el cual se disponen unos sensores de nivel asociados a puntos de recogida para detectar el nivel de desechos. Cuando se alcanza un nivel predeterminado, se envía una señal de indicación de nivel a un sistema de control de tal manera que se da la mayor prioridad a los puntos de recogida que tienen un mayor nivel para vaciarlos.
WO0105683 describe un sistema de recogida de desechos agrupando los puntos de recogida de manera que un sistema de control acciona unas válvulas de descarga asociadas a puntos de recogida por grupos. El sistema de control selecciona un grupo cada vez para abrir una serie de válvulas de descarga dentro del grupo seleccionado. El grupo de puntos de recogida que tiene el valor de prioridad más alto entre los grupos con condiciones de vaciado válidas es seleccionado para el vaciado y la recogida de desechos.
WO2004094270 describe un sistema de recogida de desechos con un sistema de tuberías de transporte de múltiples derivaciones en el cual se dispone una serie de puntos de recogida conectados a las mismas de tal manera que los desechos se vacían a través de las derivaciones. Para cada serie de posibles candidatos para el siguiente salto se predicen niveles de carga de futuros puntos de recogida en una pluralidad de derivaciones. Se determina un valor consecuencia del sistema en base a estos niveles de carga predichos y se selecciona un salto a la siguiente derivación entre los candidatos que tienen los valores consecuencia del sistema más favorables. A los niveles de carga se les puede asignar una importancia utilizando coeficientes de prioridad para tener en cuenta la importancia relativa de vaciar distintos puntos de recogida.
Aunque los sistemas y procedimientos del estado de la técnica han mostrado ser eficaces, presentan sin embargo un elevado consumo energético no deseable.
Descripción resumida de la invención
La presente invención presenta un procedimiento para el vaciado controlado de desechos de distintos puntos de recogida a través de un sistema neumático, tal como por ejemplo, un sistema que funciona en condiciones de vacío para el vaciado controlado de desechos.
Punto de recogida, tal como aquí se utiliza, significa un contenedor para alojar desechos en su interior. Este contenedor se dispone normalmente fijo en exteriores (en la calle), o en interiores (salones de hotel, etcétera) proporcionando un fácil acceso para que los desechos puedan disponerse selectivamente en el mismo.
Los puntos de recogida están conectados a unos conductos de desecho a por lo menos una tubería de transporte que normalmente es subterránea. Al menos una parte de los conductos de desecho también es subterráneo. Sin embargo, pueden construirse instalaciones de superficie como alternativa, tales como por ejemplo con algunas zonas subterráneas y algunas zonas sobre tierra. Los desechos de los puntos de recogida son conducidos a través de las tuberías de transporte a por lo menos una estación de recogida donde los desechos son procesados.
Se disponen unos conjuntos de ventiladores de velocidad variable para generar una corriente de aire para que los desechos sean convenientemente conducidos desde los puntos de recogida a las respectivas estaciones de recogida. El aire que sale de la instalación después se acondiciona, es decir, se lava, se elimina el olor, etcétera, a través de unos filtros biológicos, antes de ser vertidos a la atmósfera. Los filtros biológicos no se describen aquí dado que no forman parte de la presente invención.
El procedimiento de la presente invención se refiere al vaciado controlado de desechos de puntos de recogida que contienen el mismo tipo de desechos dispuestos selectivamente en el mismo por el usuario. Los puntos de recogida están conectados a unos conductos de desecho que conducen a unas tuberías de transporte. Las tuberías de transporte están dispuestas en ramales y por lo menos un punto de recogida está conectado a cada ramal a través del correspondiente conducto de desechos. De este modo, los desechos son conducidos hacia al menos una estación de recogida.
El procedimiento de la invención consiste en vaciar un primer punto de recogida y establecer el punto de recogida que se está vaciando como punto de recogida de referencia. A continuación, se selecciona un nuevo punto de recogida a analizar y un sistema de control determina si se cumple al menos una primera condición. Esta primera condición, que se describirá en detalle más adelante, depende del punto de recogida de referencia y del punto de recogida a analizar.
Si se cumple dicha condición, los medios de control provocan el vaciado del punto de recogida seleccionado y dicho punto de recogida seleccionado se considera ahora como nuevo punto de recogida de referencia. A continuación, se selecciona un nuevo punto de recogida a analizar.
Si la primera condición citada anteriormente no se cumple, se selecciona otro nuevo punto de recogida a analizar y se determina de nuevo si se cumple dicha condición.
En algunas realizaciones del procedimiento de la invención se ha previsto que la etapa de vaciado del punto de recogida analizado comprenda actuar sobre la correspondiente válvula de descarga asociada a dicho punto de recogida. La actuación sobre una válvula de descarga implica la apertura de la válvula de descarga durante un primer período de tiempo y el cierre de la válvula de descarga durante un segundo período de tiempo. Dicho primer y segundo período de tiempo pueden ser iguales y por lo menos el primer o el segundo período de tiempo pueden ser de unos 3 segundos.
La primera condición citada anteriormente en el procedimiento de la invención se cumple si el nivel actual de llenado del punto de recogida que está siendo analizado es igual o mayor que un parámetro teórico que es directamente proporcional a la capacidad máxima del punto de recogida que está siendo analizado y la del punto de recogida...
Reivindicaciones:
1. Procedimiento para el vaciado controlado de desechos de n puntos de recogida (RC), a través de unos conductos de desecho (100) que conducen a unas tuberías de transporte (110), comprendiendo las tuberías de transporte (110) varios ramales (b), quedando conectado al menos un punto de recogida (RC) a cada ramal (b) a través de un conducto de desecho (100) respectivo para conducir los desechos a al menos una estación de recogida (200), caracterizado por el hecho de que comprende las etapas de:
2. Procedimiento según la reivindicación 1, caracterizado por el hecho de que dicha etapa de vaciado del punto de recogida analizado (RCx) comprende actuar sobre una válvula de descarga correspondiente (120) asociada a dicho punto de recogida (RC).
3. Procedimiento según la reivindicación 2, caracterizado por el hecho de que dicha etapa de accionar una válvula de descarga (120) comprende la apertura de la válvula de descarga (120) durante un primer período de tiempo (TA) y el cierre de la válvula de descarga (120) durante un segundo período de tiempo (TB).
4. Procedimiento según la reivindicación 3, caracterizado por el hecho de que dicho primer y segundo período de tiempo (TA, TB) son iguales.
5. Procedimiento según la reivindicación 3 o 4, caracterizado por el hecho de que al menos uno de dicho primer y segundo período de tiempo (TA, TB) es de aproximadamente 3 segundos.
6. Procedimiento según la reivindicación 1, caracterizado por el hecho de que dicha primera condición se cumple si el nivel de llenado real (px) de un punto de recogida (RCx) es igual o mayor que un parámetro (VxR), que es directamente proporcional a la capacidad máxima (A, B) del punto de recogida que está siendo analizado (RCx) y la del punto de recogida de referencia (RCR) e inversamente proporcional a la distancia (dxR, DNR) asociada al punto de recogida que está siendo analizado (RCx), el punto de recogida de referencia (RCR) y la estación de recogida (200).
7. Procedimiento según la reivindicación 6, caracterizado por el hecho de que si el punto de recogida que está siendo analizado (RCx) y el punto de recogida de referencia (RCR) se encuentran en el mismo ramal (b), dicha distancia (dxR) es la distancia entre el punto de recogida que está siendo analizado (RCx) y el punto de recogida de referencia (RCR) a lo largo del citado ramal (b).
8. Procedimiento según la reivindicación 6, caracterizado por el hecho de que si el punto de recogida que está siendo analizado (RCx) y el punto de recogida de referencia (RCR) se encuentran en ramales distintos (b1, b2), la citada distancia (DN1) es la distancia entre el punto de recogida que está siendo vaciado (RCR) y un punto de intersección (N) en el ramal (b1) del punto de recogida que está siendo analizado (RCx).
9. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que la etapa de vaciar un punto de recogida (RCx) sólo se realiza si se cumple una segunda condición.
10. Procedimiento según la reivindicación 9, caracterizado por el hecho de que dicha segunda condición se cumple si el nivel de llenado (px) en dicho punto de recogida (RCx), correspondiente al volumen ocupado por los desechos asociados al citado punto de recogida (RCx), es igual o mayor que un nivel de llenado mínimo predeterminado (pm).
11. Procedimiento según la reivindicación 10, caracterizado por el hecho de que el nivel de llenado mínimo predeterminado (pm) oscila entre aproximadamente 0,20 y aproximadamente 0,50.
12. Procedimiento según la reivindicación 6, caracterizado por el hecho de que el parámetro (VxR) también depende de un parámetro adicional (tx).
13. Procedimiento según la reivindicación 12, caracterizado por el hecho de que dicho parámetro adicional (tx) es la franja horaria durante la cual se realiza la recogida de desechos.
14. Procedimiento según la reivindicación 1, caracterizado por el hecho de que dicha etapa de seleccionar un nuevo punto de recogida a analizar (RCx) se realiza de acuerdo con un orden preestablecido de puntos de recogida (RC).
15. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que los puntos de recogida (RC) están destinados a contener el mismo tipo de desechos.
16. Sistema de vaciado controlado de desechos de n puntos de recogida (RC), que comprende unos conductos de desecho (100) conectados cada uno de los puntos de recogida (RC) a por lo menos una tubería de transporte (110) que conduce a al menos una estación de recogida (200), caracterizado por el hecho de que comprende, además, medios para vaciar puntos de recogida (RCx), medios para establecer un punto de recogida a vaciar como punto de recogida de referencia (RCR), medios para seleccionar nuevos puntos de recogida a analizar (RCx), medios para determinar si se cumple una condición para vaciar dicho punto de recogida (RCx) o bien determinar otro nuevo punto de recogida a analizar (RCx).
17. Sistema según la reivindicación 16, caracterizado por el hecho de que incluye medios para determinar el nivel de llenado (px) correspondiente a un punto de recogida (RCx).
18. Sistema según la reivindicación 17, caracterizado por el hecho de que dichos medios para determinar el nivel de llenado (px) comprenden sensores de nivel (160).
Patentes similares o relacionadas:
 PLANTA DE RECOGIDA DE CENTRAL DE REENVIO, del 20 de Abril de 2010, de ROS ROCA, S.A.: La planta de recogida de central de reenvío está asociada y controlada desde una planta base de recogida neumática de residuos, y comprende la tubería de conducción […]
PLANTA DE RECOGIDA DE CENTRAL DE REENVIO, del 20 de Abril de 2010, de ROS ROCA, S.A.: La planta de recogida de central de reenvío está asociada y controlada desde una planta base de recogida neumática de residuos, y comprende la tubería de conducción […]
 SISTEMA DE RECOGIDA DE ACCION INMEDIATA, del 5 de Febrero de 2010, de ROS ROCA, S.A.: El sistema de recogida de acción inmediata, para sistema de recogida neumática de la invención comprende un depósito receptor provisto de una puerta […]
SISTEMA DE RECOGIDA DE ACCION INMEDIATA, del 5 de Febrero de 2010, de ROS ROCA, S.A.: El sistema de recogida de acción inmediata, para sistema de recogida neumática de la invención comprende un depósito receptor provisto de una puerta […]
Dispositivo y procedimiento de separación para un sistema de transporte neumático de material, del 4 de Marzo de 2020, de MARICAP OY: Procedimiento para mejorar la eficiencia de la separación y/o para impedir el bloqueo de la abertura de salida para el aire de transporte de un dispositivo […]
Almacenamiento de residuos, del 12 de Febrero de 2020, de Envac AB (100.0%): Un tanque de almacenamiento de residuos de un sistema de recogida de residuos al vacío , que tiene una abertura […]
Procedimiento y aparato para alimentar y manipular material de residuos, del 9 de Octubre de 2019, de MARICAP OY: Procedimiento para alimentar y manipular material de residuos en la sección de canal de un sistema neumático de transporte de material de residuos, procedimiento […]
Procedimiento y aparato para alimentar y manipular material de residuos, del 11 de Septiembre de 2019, de MARICAP OY: Procedimiento para alimentar y manipular material de residuos en la sección de canal de un sistema neumático de transporte de material de residuos, […]
Método y sistema de transporte neumático de material, del 9 de Abril de 2019, de MARICAP OY: Un método para transportar neumáticamente material con un sistema de transporte neumático de materiales, tal como un sistema de transporte de residuos, […]
Método para la manipulación de material en un sistema de transporte de material, un punto de entrada de un sistema de transporte de material y un sistema de transporte de material, del 6 de Marzo de 2019, de MARICAP OY: Método para introducir y transportar material en un sistema de transporte neumático de material, comprendiendo el sistema de transporte al menos […]