SONAR CARTOGRAFICO DE ATRAQUE.
Sonar cartográfico de atraque caracterizado porque está formado por un sistema que utiliza un traductor de ondas ultrasónicas situado en una barquilla adosada al casco de un barco,
orientado hacia el exterior de los costados del barco y controlado por un sistema que, al provoca el disparo de un haz de ondas de ultrasonido que primero choca con los obstáculos situados alrededor del barco y después es reflejado hacia el traductor, que actúa también como receptor, obtiene una serie de datos que son analizados y cuya información resultante se visualiza en una pantalla, proporcionando una representación gráfica del entorno del barco
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200702940.
Solicitante: ZUNIBAL, S.L..
Nacionalidad solicitante: España.
Provincia: VIZCAYA.
Inventor/es: ORMAECHEA ZALBIDEA,FCO. JAVIER.
Fecha de Solicitud: 7 de Noviembre de 2007.
Fecha de Publicación: .
Fecha de Concesión: 8 de Abril de 2010.
Clasificación Internacional de Patentes:
- G01S15/89D1A
Clasificación PCT:
- G01S15/89 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › para la cartografía o la formación de imágenes.
Descripción:
Sonar cartográfico de atraque.
Objeto de la invención
Esta invención se refiere a un sonar cartográfico de atraque para navegación en puertos.
Antecedentes de la invención
La seguridad se ha convertido en los últimos tiempos en uno de los temas más importantes de la navegación marítima. Se están realizando grandes esfuerzos internacionales y comunitarios para adoptar medidas que salvaguarden la vida de las personas en el mar, e incrementen la seguridad de los cargamentos, buques, instalaciones portuarias y la protección del medio marino.
En la navegación marítima es importante que las personas que gobiernan un barco sepan la posición de éste, tanto en alta mar como en los puertos y vías de agua de denso tráfico. En alta mar, la posición exacta, la velocidad y el rumbo son necesarios para asegurar que la nave llegue a su destino de la manera más económica y segura posible. La necesidad de contar con datos de posicionamiento exactos es aún más crítica en las llegadas o salidas del puerto, ya que el tráfico de naves y otros posibles peligros hacen más difícil la maniobrabilidad y, ello por tanto, hace aumentar el riesgo de accidentes.
El uso de remolcadores, aparatos GPS de detección de posición, y otros medios similares no siempre son suficientes para garantizar la seguridad en las maniobras de atraque, unas veces por las características del puerto y otras veces por el movimiento de otros barcos que haya en él.
Descripción de la invención
El invento que se describe en la presente memoria da respuesta al problema descrito, proporcionando un medio autónomo y fiable para el atraque de barcos.
El sistema de atraque utiliza un equipo de sonar consistente en un traductor que proyecta un haz de ondas de ultrasonido. Dicho traductor va ubicado en una barquilla situada en el casco de un barco, con orientación horizontal dirigida hacia las zonas laterales que rodean el barco. Los elementos que controlan el disparo del haz de ultrasonido y la recepción el mismo van ubicados en una caja de sonar adosada al traductor. Tanto el traductor, basado en la patente con nº de solicitud P200702908, como el sistema de control de disparo del haz de ultrasonido, basado en la patente con nº de solicitud P200501318, están diseñados por el inventor que presenta esta memoria.
Mediante un sistema de control se provoca un haz de ondas de ultrasonido que primero chocan con los obstáculos que el barco pueda tener a los costados y después son reflejadas hacia el traductor, que actúa también como receptor. La señal reflejada por dichos obstáculos es recogida y procesada, enviándose posteriormente a un sistema de control que la analiza. La información resultante de este proceso es visualizada en una pantalla, donde puede verse la forma que tiene el obstáculo encontrado y además, conocerse la distancia que hay entre el barco y dicho obstáculo.
Breve descripción de los dibujos
Las características y ventajas de la invención se podrán ver más claramente a partir de la descripción detallada que sigue de una forma preferida de realización, dada únicamente a título de ejemplo ilustrativo y no limitativo, con referencia a las figuras que se acompañan.
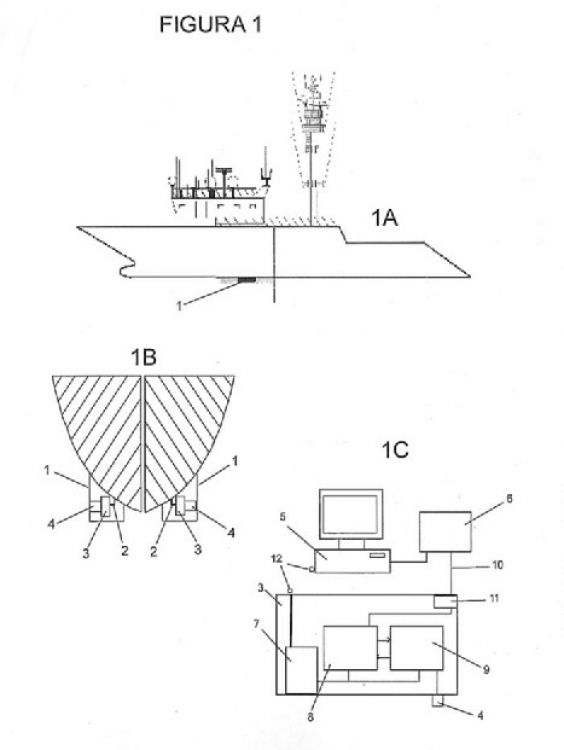
La figura 1 muestra la posición del aparato de sónar en el barco así como la representación de los elementos que intervienen en el proceso.
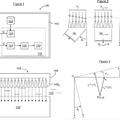
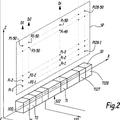
La figura 2 muestra un ejemplo de uso del sistema.
Descripción de una realización preferencial
Tal y como se ha indicado en lo que antecede, la descripción detallada de una realización preferencial de la invención va a ser llevada a cabo en lo que sigue con la ayuda de los dibujos anexos, a través de los cuales se utilizan las mismas referencias numéricas para designar las partes iguales o semejantes.
En la figura 1A se muestra una vista lateral de un barco que lleva adosada al casco una barquilla (1) en la que va montado el proyector de haces de ultrasonido.
En la figura 1B se muestra con detalle la instalación de barquillas (1) en ambos costados del barco. Los elementos montados en el interior son: el cable de alimentación eléctrica (2), la caja de sónar (3) que contiene los circuitos de disparo del haz de ultrasonido, y el traductor (4). En la figura puede observarse también la orientación lateral que llevan los traductores (4).
La figura 1C muestra un diagrama de bloques del sistema. El ordenador (5) se sitúa en el puente del barco, y desde él se controla la aplicación y la visualización de resultados. La caja de interfaz (6) va instalada junto al ordenador (5) y sirve como conductor de la comunicación entre la caja del sónar (3) y el ordenador (5). La caja de sónar (3) va situada en la barquilla (1) junto al traductor (4). Los elementos que la componen son: una fuente de alimentación (7), una tarjeta de control (8), una tarjeta de disparo de traductor (9) y un interfaz de datos (11). La caja de sónar (3) se comunica con la caja de interfaz (6) mediante un cable de datos (10) y un puerto USB.
Tanto el ordenador (5) como la caja de sónar (3) reciben tensión desde una toma de corriente alterna (12).
Para cada traductor, desde el ordenador (5) se realiza una petición de disparo de onda que es recogida a través de una interfaz de datos por la tarjeta de control (8). Ésta envía una señal a la tarjeta de disparo del traductor (9) la cual es convertida por el traductor (4) en una señal ultrasónica que viaja hacia el exterior de los costados del barco. Los ecos creados son reflejados y recogidos por el traductor (4). La señal obtenida se procesa en la tarjeta de control (8) y el resultado se envía a través de la interfaz de datos (11) a la caja de interfaz (6) y de ésta al ordenador (5), donde mediante un software determinado, se visualizan los datos obtenidos. Este proceso se repite de forma continuada permitiendo obtener información lo que hay alrededor del barco en tiempo real, según éste va avanzando.
La figura 2A muestra como las ondas de ultrasonido salen del traductor (4) situado en la barquilla (1) y chocan con un obstáculo situado en el lateral del barco. Este proceso se realiza durante todo el recorrido del barco en el puerto.
La figura 2B muestra la representación gráfica obtenida por el sistema, donde puede verse la imagen (13) del obstáculo y la distancia (14) que hay hasta él. Ello permite un conocimiento directo del entorno en que se encuentra el barco, lo cual favorece la maniobrabilidad del barco, disminuyendo con ello el riesgo de accidentes.
Debe entenderse que la invención ha sido descrita según una realización preferida de la misma, por lo que puede ser susceptible de modificaciones sin que ello suponga alteración alguna del fundamento de dicha invención, pudiendo afectar tales modificaciones a la forma, tamaño o materiales de fabricación.
Reivindicaciones:
1. Sonar cartográfico de atraque caracterizado porque está formado por un sistema que utiliza un traductor (4) de ondas ultrasónicas, situado en una barquilla (1) adosada al casco de un barco y orientado hacia el exterior de los costados del barco, controlado por un sistema que, al provocar el disparo de un haz de ondas de ultrasonido que primero choca con el fondo y después es reflejado hacia el traductor (4) que actúa también como receptor, obtiene una serie de datos que son analizados y cuya información resultante se visualiza en una pantalla, proporcionando una imagen (13) del entorno del barco y datos sobre la distancia (14) a posibles obstáculos.
2. Sonar cartográfico de atraque según reivindicación primera, caracterizado porque los elementos que controlan el disparo del haz de ultrasonido y la recepción el mismo van ubicados en una caja de sonar (3) adosada al traductor (4).
Patentes similares o relacionadas:
 Método de procesamiento de señales resultantes de una adquisición mediante exploración ultrasónica, programa informático y dispositivo de exploración por ultrasonidos correspondiente, del 29 de Julio de 2020, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Metodo de procesamiento de senales (S) resultantes de una adquisicion por exploracion ultrasonica que comprende las siguientes etapas:
[…]
Método de procesamiento de señales resultantes de una adquisición mediante exploración ultrasónica, programa informático y dispositivo de exploración por ultrasonidos correspondiente, del 29 de Julio de 2020, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Metodo de procesamiento de senales (S) resultantes de una adquisicion por exploracion ultrasonica que comprende las siguientes etapas:
[…]
Método de reconstrucción de imágenes basado en modelo, del 6 de Mayo de 2020, de ECOLE POLYTECHNIQUE FEDERALE DE LAUSANNE (EPFL): Un método de reconstrucción de imágenes de ondas de pulso que comprende: • transmitir un conjunto de ondas de pulso a un objeto […]
 Procedimiento de imágenes por onda de cizalla e instalación para generar al menos una onda de cizalla, del 25 de Diciembre de 2019, de INSTITUT NATIONAL DE LA SANTE ET DE LA RECHERCHE MEDICALE: Procedimiento para generar al menos una onda de cizalla en una región diana (SP) de un sólido blando (S), incluyendo este procedimiento al menos las siguientes […]
Procedimiento de imágenes por onda de cizalla e instalación para generar al menos una onda de cizalla, del 25 de Diciembre de 2019, de INSTITUT NATIONAL DE LA SANTE ET DE LA RECHERCHE MEDICALE: Procedimiento para generar al menos una onda de cizalla en una región diana (SP) de un sólido blando (S), incluyendo este procedimiento al menos las siguientes […]
Receptor de píxeles con cancelación de capacitancia para aparato de visualización por ultrasonidos, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un aparato, que comprende: una primera capa de metalización (M3) acoplada a una capa piezoeléctrica , en la que se forma una primera […]
Procedimiento para la mejora cosmética no invasiva de la celulitis, del 24 de Julio de 2019, de Guided Therapy Systems, L.L.C: Un procedimiento para el tratamiento cosmético no invasivo de la celulitis, comprendiendo el procedimiento usar un sistema, que está caracterizado por: […]
Detección de estallido de vapor, del 17 de Julio de 2019, de Biosense Webster (Israel), Ltd: Aparatos médicos, que comprenden: una sonda alargada configurada para su inserción en el cuerpo de un paciente, comprendiendo la sonda un elemento de ablación […]
Procedimiento de tratamiento de señales procedentes de una adquisición por sondeo ultrasónico, programa de ordenador y dispositivo de sondeo de ultrasonidos correspondientes, del 8 de Marzo de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Procedimiento para el tratamiento de señales ultrasónicas (S) resultantes de una adquisición mediante sondeo ultrasónico que comprende las etapas siguientes: […]
Procedimiento de construcción de un mapa de probabilidad entre la ausencia y la presencia de obstáculos para un robot autónomo, del 25 de Abril de 2018, de Softbank Robotics Europe: Un procedimiento para determinar, mediante un ordenador de a bordo de un robot autónomo, un mapa de píxeles de la probabilidad de al menos una entre la ausencia […]