SISTEMA Y PROCEDIMIENTO DE ACOPLAMIENTO DINAMICO DE ROSCAS DE TORNILLO DE AVANCE.
Un sistema para alinear roscas de un tornillo de avance con las roscas de un mecanismo de atornillamiento,
operándose el mecanismo de atornillamiento para traducir un movimiento giratorio del tornillo de avance en un movimiento lineal cuando sus roscas se encuentran acopladas completamente entre sí, comprendiendo el sistema:
un motor acoplado al tornillo de avance que gira de manera selectiva el tornillo de avance;
un accionador del émbolo acoplado al mecanismo de atornillamiento para acoplar de manera selectiva un émbolo de la jeringa para el movimiento del émbolo en respuesta al movimiento del mecanismo de atornillamiento;
un sensor de posición que proporciona una señal de posición representativa de una posición axial del mecanismo de atornillamiento a lo largo del tornillo de avance;
un dispositivo de liberación que desacopla las roscas del mecanismo de atornillamiento de un acoplamiento con las roscas del tornillo de avance, permitiendo de ese modo que un operador mueva el mecanismo de atornillamiento hasta una posición seleccionada a lo largo del tornillo de avance en la que las roscas del mecanismo de atornillamiento pueden ser acopladas de nuevo con las roscas del tornillo de avance; y
un procesador que recibe señales de posición del sensor de posición y controla el motor para hacer girar el tornillo de avance hasta una posición rotacional predeterminada basada en las señales de posición
Tipo: Resumen de patente/invención. Número de Solicitud: W06027780US.
Solicitante: CARDINAL HEALTH 303, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 3750 TORREY VIEW COURT,SAN DIEGO, CA 92130.
Inventor/es: SIEFERT, ROBERT, J.
Fecha de Publicación: .
Fecha Concesión Europea: 28 de Octubre de 2009.
Clasificación PCT:
- A61M5/145 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61M DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO (introducción de remedios en o sobre el cuerpo de animales A61D 7/00; medios para la inserción de tampones A61F 13/26; dispositivos para la administración vía oral de alimentos o medicinas A61J; recipientes para la recogida, almacenamiento o administración de sangre o de fluidos médicos A61J 1/05 ); DISPOSITIVOS PARA HACER CIRCULAR LOS AGENTES POR EL CUERPO O PARA SU EXTRACCION (cirugía A61B; aspectos químicos de los artículos quirúrgicos A61L; magnetoterapia utilizando elementos magnéticos colocados dentro del cuerpo A61N 2/10 ); DISPOSITIVOS PARA INDUCIR UN ESTADO DE SUEÑO O LETARGIA O PARA PONERLE FIN. › A61M 5/00 Dispositivos para introducir agentes en el cuerpo vía subcutánea, intravenosa o intramuscular; Accesorios correspondientes, p. ej. dispositivos de llenado o de limpieza, reposa-brazos (conectores o acoplamientos para tubos, válvulas o conjuntos de derivación, especialmente concebidos para uso médico A61M 39/00; recipientes especialmente adaptados para fines médicos o farmacéuticos A61J 1/00). › utilizando depósitos con presión, p. ej. por medio de pistones.
- A61M5/172 A61M 5/00 […] › eléctricos o electrónicos.
- F16H25/20 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 25/00 Transmisiones que implican esencialmente y únicamente sistemas de leva y ruleta o mecanismos de tornillo y tuerca. › Mecanismos de tornillo (con inversión automática F16H 25/12).
Fragmento de la descripción:
Sistema y procedimiento de acoplamiento dinámico de roscas de tornillo de avance.
Campo de la invención
La presente invención versa generalmente acerca de mecanismos de atornillamiento y, más en particular, acerca de un sistema y un procedimiento de acoplamiento para acoplar un accionador con un tornillo de avance.
Antecedentes de la invención
La infusión de fluidos como fluidos parenterales en el cuerpo humano se lleva a cabo en muchos casos por medio de una bomba de jeringa que tiene un tornillo de avance sobre el que hay montado un mecanismo de atornillamiento. El giro del tornillo de avance se traduce en un movimiento lineal por medio del mecanismo de atornillamiento. Se transmite el movimiento lineal a un émbolo de la jeringa por medio de un accionador del émbolo que normalmente se encuentra conectado de forma rígida al mecanismo de atornillamiento. Para facilitar la sustitución de una jeringa vacía, se utilizan tuercas divididas o medias tuercas como parte del mecanismo de atornillamiento en algunas bombas de jeringa para un reposicionamiento fácil y rápido del mecanismo de atornillamiento y del accionador del émbolo en el tornillo de avance para acoplar el émbolo de una jeringa llena con el accionador del émbolo. Se proporciona una palanca de activación u otra interfaz mecánica para el operador en el accionador del émbolo para separar las roscas de la tuerca dividida de las roscas del tornillo de avance y para separar el accionador del émbolo del presente émbolo de la jeringa. Entonces, se mueve manualmente el accionador del émbolo alejándolo de la jeringa vacía de forma que pueda ser sacado. En el caso en el que se debe cargar una nueva jeringa en la bomba de la jeringa, el operador continúa manipulando la palanca de activación u otra interfaz mecánica para desacoplar las tuercas divididas del tornillo de avance, mover el accionador del émbolo y las tuercas divididas a lo largo del tornillo de avance hasta una posición apropiada, e insertar la nueva jeringa en la bomba. Entonces, el operador mueve el accionador del émbolo en contacto con el tirador del émbolo de la nueva jeringa, suelta la palanca de activación cuando se presiona el accionador del émbolo contra el émbolo de la jeringa, y permite de ese modo que las tuercas divididas caigan sobre el tornillo de avance. Idealmente, las crestas de las roscas de la tuerca dividida caen tanto como sea posible en las raíces de las roscas del tornillo de avance, de forma que las roscas de ambos dispositivos están completamente acopladas. Por desgracia, las roscas no siempre se acoplan por completo.
Como se muestra en la Fig. 1, en algunos casos las crestas de las roscas 10 de la tuerca dividida se alinean de forma no deseada con las crestas de las roscas 12 del tornillo de avance, y entran en contacto con las mismas, en vez de que las roscas se acoplen entre sí. Debido a que cualquier conjunto de roscas puede ser relativamente plano en sus crestas, no se acoplan entre sí hasta que el tornillo de avance ha girado una cantidad suficiente y un dispositivo de empuje del mecanismo de atornillamiento ha forzado a las roscas de la tuerca dividida a caer y acoplarse con las roscas del tornillo de avance. Con tasas bajas de infusión, dicho giro suficiente del tornillo de avance puede llevar una cantidad sustancial de tiempo durante el que el paciente no recibe fluido de infusión.
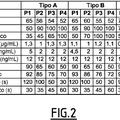
En otro caso como se presente en la Fig. 2, las superficies no motrices de las roscas 10 de la tuerca dividida pueden entrar en contacto de forma no deseada con las superficies no motrices de las roscas 12 del tornillo de avance cuando se suelta la palanca de activación. La flecha indica la dirección de avance de las tuercas divididas y del accionador del émbolo. Debido a la holgura 14 de la rosca entre los dos conjuntos de roscas, puede pasar algo de tiempo antes de que las superficies motrices de las roscas 12 del tornillo de avance se acoplen completamente con las superficies motrices de las roscas 10 de la tuerca dividida y comiencen realmente a mover el émbolo de la jeringa junto con las tuercas divididas. Esta cantidad de tiempo también sería un periodo durante el que el paciente no recibe fluido de infusión.
En aún otro caso como se presenta en la Fig. 3, las superficies motrices de las roscas 10 de la tuerca dividida pueden acoplarse solo parcialmente con las superficies motrices de las roscas 12 del tornillo de avance. El acoplamiento parcial se produce cuando las crestas de las roscas 10 de la tuerca dividida no caen completamente en las raíces de las roscas 12 del tornillo de avance. Cuando esto ocurre, una gran cantidad de contrapresión ejercida por la jeringa llena y un vector de fuerza desarrollados por las roscas 12 del tornillo de avance tienden a forzar a las roscas 10 de la tuerca dividida hacia arriba y fuera de las roscas 12 del tornillo de avance. Si la fuerza de empuje sobre las tuercas divididas es insuficiente para superar estos factores, las roscas 10 de la tuerca dividida pueden ser forzadas fuera de contacto con las superficies motrices de las roscas 12 del tornillo de avance y en la posición mostrada en la Fig. 1. Este caso probablemente tendría como resultado un periodo de tiempo durante el que el paciente no recibiría fluido de infusión y este periodo de tiempo puede exceder el asociado con la Fig. 1.
Con tasas bajas de infusión, podría llevar una hora o más antes de que se descubran y se corrijan las condiciones de no acoplamiento o de acoplamiento parcial ilustradas en las Figuras 1-3 y la falta de consecución resultante para administrar fluido de infusión o se superen automáticamente por medio del giro lento del tornillo de avance. Este problema solo se supera parcialmente en un sistema anterior que gira automáticamente el tornillo de avance en una dirección de avance para eliminar cualquier holgura de la rosca o en una combinación de direcciones de avance y retroceso para asentar completamente las roscas de la tuerca dividida y luego eliminar cualquier holgura de la rosca. Se emplea un sensor de acoplamiento para dar una señal de acoplamiento positivo cuando las roscas de la tuerca dividida estén asentadas en las roscas del tornillo de avance en un punto, o por debajo del mismo, correspondiente a un porcentaje de la profundidad de la raíz de la rosca que se considera que representa un acoplamiento suficiente. Si la señal de acoplamiento es positiva, el tornillo de avance se gira automáticamente una cantidad fija en la dirección de avance para eliminar cualquier holgura de la rosca. Esto se lleva a cabo incluso cuando las roscas 10 de la tuerca dividida ya se encuentran completamente asentadas. Por lo tanto, el giro automático podría mover el émbolo de la jeringa junto con las tuercas divididas y provocar una infusión excesiva de fluido. Si la señal de acoplamiento es negativa, el tornillo de avance se gira una cantidad fija en la dirección de retroceso y se toma otra lectura del sensor de acoplamiento. Si la señal de acoplamiento sigue siendo negativa, se gira de nuevo el tornillo de avance una cantidad fija en la dirección de retroceso y se vuelve a tomar una lectura del sensor de acoplamiento. Los giros de retroceso se repetirían un número fijo de veces, después de lo cual se giraría el tornillo de avance una cantidad fija en la dirección de avance seguido de otra lectura del sensor de acoplamiento. Se dispararía una alarma después de un número fijo de intentos sin éxito del acoplamiento roscado. Si después de cualquier intento se considera que las roscas de la tuerca dividida están lo suficientemente asentadas, se giraría automáticamente el tornillo de avance una cantidad fija en la dirección de avance para eliminar cualquier holgura posible de la rosca. Por lo tanto, el sistema anterior siempre gira el tornillo de avance una cantidad fija independientemente de la posición lineal de las crestas de las roscas de la tuerca dividida con respecto a las crestas de las roscas del tornillo de avance.
Además, el giro automático en el sistema anterior se inicia después de que una señal de un sensor del émbolo indique que hay presente un émbolo de la jeringa y después de que una señal del sensor de acoplamiento indique que las roscas 10 de la tuerca dividida no están asentadas suficientemente. De forma no deseable, el giro se produce de forma prematura en algunos casos cuando una indicación negativa del sensor de acoplamiento se produce porque el operador no ha soltado la palanca de activación, no porque las crestas de las roscas 10 de la tuerca dividida están descansando en las crestas de las roscas 12 del tornillo de avance.
Por lo tanto, cuando se ha completado la rutina de giro automático y el operador suelta subsiguientemente...
Reivindicaciones:
1. Un sistema para alinear roscas de un tornillo de avance con las roscas de un mecanismo de atornillamiento, operándose el mecanismo de atornillamiento para traducir un movimiento giratorio del tornillo de avance en un movimiento lineal cuando sus roscas se encuentran acopladas completamente entre sí, comprendiendo el sistema:
2. El sistema para alinear roscas de la reivindicación 1, en el que:
3. El sistema para alinear roscas de la reivindicación 2, en el que:
4. El sistema para alinear roscas de la reivindicación 2, que comprende una memoria en la que se registra una posición de referencia a lo largo del tornillo de avance en la que las roscas del mecanismo de atornillamiento y las roscas del tornillo de avance han estado alineadas y acopladas completamente entre sí;
en el que el procesador recibe la señal de posición, compara la señal de posición con la posición de referencia, y, en base a la posición de referencia y a la señal de posición, controla el motor para hacer girar el tornillo de avance hasta la posición rotacional en la que las roscas del tornillo de avance están alineadas con las roscas del mecanismo de atornillamiento según están siendo vueltas a acoplar las roscas del tornillo de avance y del mecanismo de atornillamiento.
5. El sistema para alinear roscas de la reivindicación 4, que comprende además un sensor del émbolo de la jeringa que proporciona una señal del sensor del émbolo al detectar el acoplamiento de un émbolo de la jeringa con el accionador del émbolo;
en el que al recibir el procesador la señal del sensor del émbolo, el procesador compara la señal de posición con la posición de referencia, y controla el motor para hacer girar el tornillo de avance hasta la posición rotacional en la que las roscas del tornillo de avance se encuentran alineadas con las roscas del mecanismo de atornillamiento según están volviendo a ser acopladas las roscas del tornillo de avance y del mecanismo de atornillamiento en base a la posición de referencia y a la señal de posición.
6. El sistema para alinear roscas de la reivindicación 5, en el que al recibir el procesador la señal del sensor del émbolo, recibe la señal de posición, el procesador compara la señal de posición con la posición de referencia, y controla el motor para hacer girar el tornillo de avance hasta la posición rotacional en la que las roscas del tornillo de avance se encuentran alineadas con las roscas del mecanismo de atornillamiento según están siendo acopladas de nuevo las roscas del tornillo de avance y del mecanismo de atornillamiento en base a la posición de referencia y a la señal de posición.
7. El sistema para alinear roscas de la reivindicación 2, que comprende además un sensor de acoplamiento de roscas que proporciona una señal de acoplamiento al detectar que las roscas del mecanismo de atornillamiento se encuentran completamente acopladas con las roscas del tornillo de avance;
8. El sistema para alinear roscas de la reivindicación 7, que comprende además un sensor del émbolo de la jeringa que proporciona una señal del sensor del émbolo al detectar el acoplamiento de un émbolo de la jeringa con el accionador del émbolo;
en el que al recibir el procesador la señal del sensor del émbolo, el procesador compara la señal de posición con la posición de referencia y controla el motor para hacer girar el tornillo de avance hasta la posición rotacional en la que las roscas del tornillo de avance se encuentran alineadas con las roscas del mecanismo de atornillamiento según están siendo acopladas de nuevo las roscas del tornillo de avance y del mecanismo de atornillamiento en base a la posición de referencia y a la señal de posición.
9. El sistema para alinear roscas de la reivindicación 8, en el que al recibir el procesador la señal del sensor del émbolo el procesador recibe la señal de posición, compara la señal de posición con la posición de referencia, y controla el motor para hacer girar el tornillo de avance hasta la posición rotacional en la que las roscas del tornillo de avance se encuentran alineadas con las roscas del mecanismo de atornillamiento según están siendo acopladas de nuevo las roscas del tornillo de avance con las del mecanismo de atornillamiento en base a la posición de referencia y a la señal de posición.
10. El sistema para alinear roscas de la reivindicación 2, en el que:
11. El sistema para alinear roscas de la reivindicación 10, que comprende además un sensor de acoplamiento de roscas que proporciona una señal de acoplamiento de las roscas al detectar que las roscas del mecanismo de atornillamiento se encuentran completamente acopladas con las roscas del tornillo de avance;
en el que al recibir la señal de acoplamiento de las roscas, el procesador registra la posición del mecanismo de atornillamiento a lo largo del tornillo de avance como una posición de referencia; y
en el que el procesador recibe la señal de posición, compara la señal de posición con la posición de referencia, y controla el motor para hacer girar el tornillo de avance hasta la posición rotacional en la que las roscas del tornillo de avance se encuentran alineadas con las roscas del mecanismo de atornillamiento según están siendo acopladas de nuevo las roscas del tornillo de avance con las del mecanismo de atornillamiento en base a la posición de referencia y a la señal de posición.
12. El sistema para alinear roscas de la reivindicación 11, en el que el procesador monitoriza la señal de acoplamiento de las roscas al acoplarse de nuevo las roscas del mecanismo de atornillamiento con las roscas del tornillo de avance y si no se recibe la señal de acoplamiento de las roscas, el procesador altera el factor de conversión.
13. Un procedimiento para alinear roscas de un tornillo de avance con roscas de un mecanismo de atornillamiento, operándose el mecanismo de atornillamiento para traducir un movimiento giratorio del tornillo de avance en un movimiento lineal cuando sus roscas se encuentran completamente acopladas entre sí, comprendiendo el procedimiento:
Patentes similares o relacionadas:
Dispositivo de inyección manual y módulo desechable, del 6 de Mayo de 2020, de F. HOFFMANN-LA ROCHE AG: Dispositivo de inyección manual para la inyección medida de un fármaco líquido en el tejido de una persona, incluyendo el dispositivo de inyección: […]
 Sistema de control de medios de inyección de agentes de anestesia o de sedación con vistas a la inducción de las mismas, del 29 de Abril de 2020, de MedSTEER: Sistema de control de medios de inyección de agentes de anestesia o de sedación en modo de anestesia o de sedación intravenosa con un objetivo […]
Sistema de control de medios de inyección de agentes de anestesia o de sedación con vistas a la inducción de las mismas, del 29 de Abril de 2020, de MedSTEER: Sistema de control de medios de inyección de agentes de anestesia o de sedación en modo de anestesia o de sedación intravenosa con un objetivo […]
Método y aparato para inyección subcutánea con estimulación nerviosa eléctrica, del 15 de Abril de 2020, de MILESTONE SCIENTIFIC, INC.: Un aparato para administrar fluido anestésico en estrecha proximidad a un nervio para efectuar un bloqueo de nervios periféricos, comprendiendo el aparato: […]
Sistema de sensor de flujo que incluye contactos de resorte, del 11 de Marzo de 2020, de Crisi Medical Systems, Inc: Un subconjunto de sensor de flujo para detectar el flujo de un medicamento fluido que comprende lo siguiente: un tubo de flujo […]
Sistema de infusión multisensor para detectar aire o una oclusión en el sistema de infusión, del 26 de Febrero de 2020, de ICU MEDICAL, INC.: Un sistema de infusión para ser conectado funcionalmente a una línea de entrega de fluido y a un recipiente de infusión que contiene un fluido de […]
Dispositivo modular de infusión médica con medios para identificación/autenticación entre sus componentes, del 26 de Febrero de 2020, de F. HOFFMANN-LA ROCHE AG: Un sistema para dispensar un fluido terapéutico al cuerpo de un usuario, comprendiendo el sistema: un depósito para contener el fluido terapéutico, […]
Un dispositivo para la administración de fármacos, del 19 de Febrero de 2020, de F. HOFFMANN-LA ROCHE AG: Un dispositivo portátil de administración de líquido terapéutico que tiene un factor de forma que permite el uso ambulatorio por un usuario, comprendiendo el dispositivo: […]
Composiciones y herramientas para tratar el glaucoma, del 12 de Febrero de 2020, de P&X Medical NV: Composición que comprende líquido cefalorraquídeo (LCR) o una composición similar al LCR para su uso en la prevención y/o el tratamiento del glaucoma, en donde la composición […]